Страницы работы
Содержание работы
Решение
Выполняются на базе программного пакета Twido
Suite, программного
симулятора, интегрированного в Twido Suite, и программируемых контроллеров Twido.
Лабораторная работа 1
Процедура создания проекта в Twido Suite
Цель работы: Изучение состава, режимов работы и
функциональных возможностей программного пакета Twido Suite и встроенного в него
симулятора. Ввод, редактирование и отладка простейших программ.
Задачи:
1. Cоздайте проект в среде Twido. Выберите
контроллер
2. Настройте
подключение к сети Ethernet.
3. Разработайте
и введите в секцию 1 на языке Ladder ( LD —
релейно-контакторная схема) программу, реализующую типовой узел выбора
направления движения.
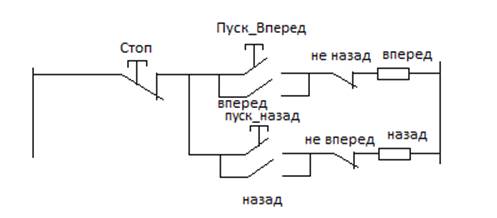
При нажатии кнопки “Пуск вперед”
контактор должен двигаться вперед ( то есть активизируется одноименный выход “
Контактор вперед”), если не нажата кнопка Пуск назад. Аналогично при нажатии
кнопки пуск назад контактор должен двигаться назад( активизируется выход Контактор
назад), если не нажата кнопка Пуск вперед. При нажатии кнопки стоп – контактор
должен остановиться.
4. Запустите
и отладьте программу в режиме симулятора.
5. Разработайте
и введите в секцию 2 на языке LD
программу, реализующую такой же типовой узел выбора направления вращения, но с
использованием инструкций (S) и (R) для управления выходами
6. Создайте
анимационную таблицу “Узел Вперед-Назад-Стоп” и вставьте в нее используемые
входы и выходы.
7. Разработайте
и введите в секцию 3 на языке LD
программу, реализующую последовательное включение, а затем отключение выхода
при каждом нажатии кнопки
8. Запустите
программу на контроллере.
ПРИМЕЧАНИЕ : воспользуйтесь специальным справочным пособием
по этой лабораторной работе!
Пример решения.
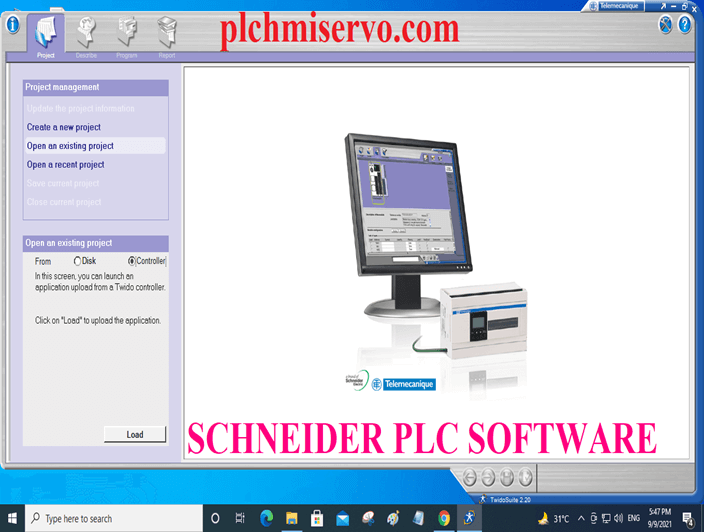
1. Произведите
запуск TwidoSuite в режиме Programming
Mode (Start ® Programs ® Schneider Electric ® TwidoSuite или по пиктограмме![]() на
на
рабочем столе) и создайте проект с именем «Ваша фамилия_1″.Ознакомьтесь
с разделом 2 справочного пособия: Создание нового проекта. При выборе типа
контроллера в окне Describe используйте контроллер TWDLCAE40DRF.
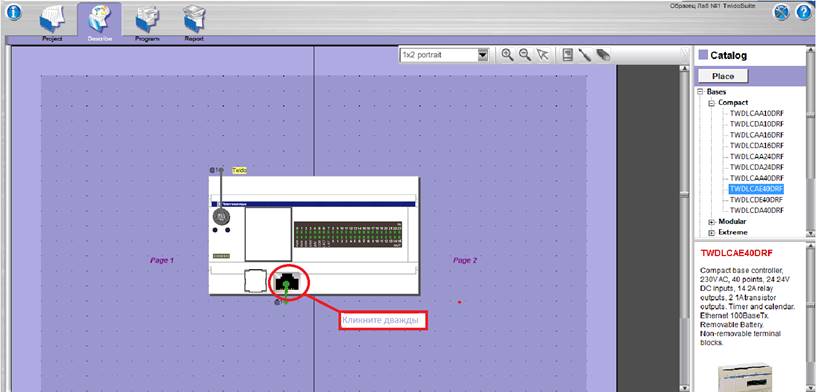
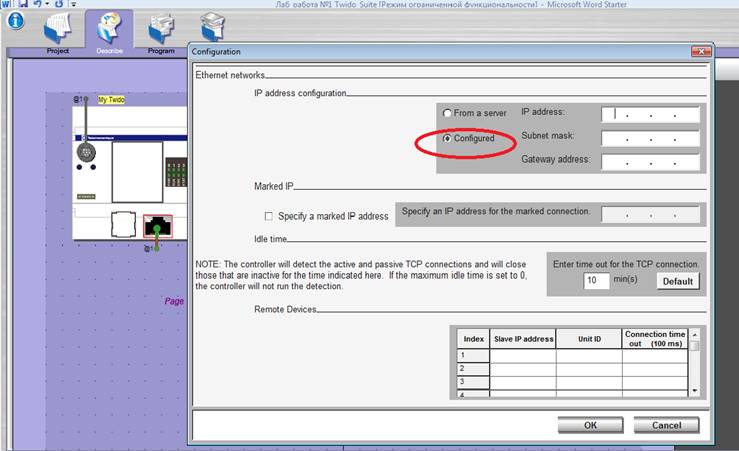
Настройка подключения к контроллеру по Ethernet
Наведите курсор на Ethernet порт(выделен красной рамкой с зеленым указателем), дважды
кликните по порту. В появившемся окне введите настройки конфигурации. Для
этого выберите режим Сonfigured
IP адрес указан на контроллере с
которым вы работаете. Маска подсети 255.255.255.0
Шлюз такой же как и IP адрес, но
последняя цифра – 1.
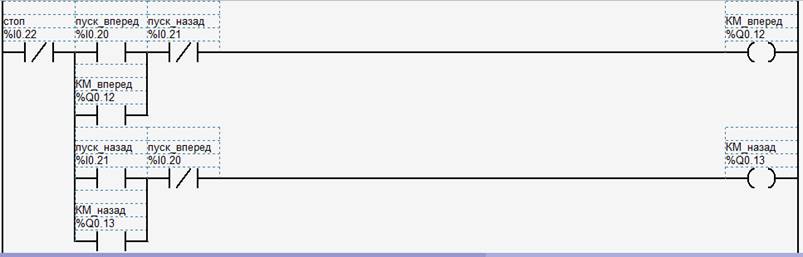
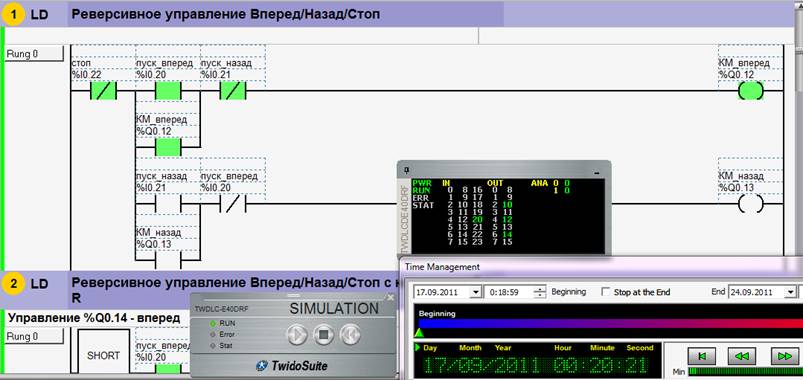
2. Разработайте
и введите в секцию 1 на языке Ladder ( LD — релейно-контакторная схема) программу,
реализующую типовой узел выбора направления вращения.
Используйте следующие органы
управления, входы и выходы программируемого контроллера:
«Пуск вперед» — %I0.20
«Пуск назад» — %I0.21
«Стоп» —
%I0.22
«Контактор вперед» %Q0.12
«Контактор назад » %Q0.13
Руководствуйтесь указаниями раздела 5.Язык
лестничных диаграмм справочной системы.
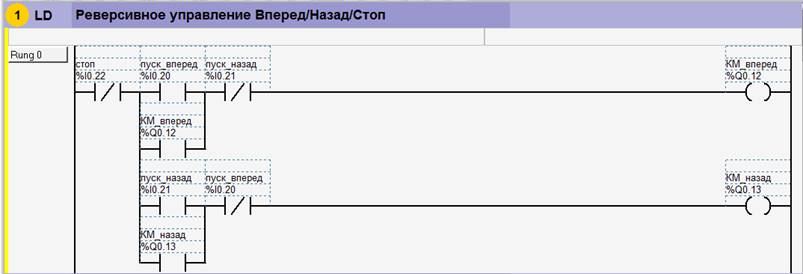
Использование в параллельных ветвях нормально разомкнутых
контактов КМ_вперед и КМ_назад обеспечивает самоподхват . Т.е. после того как
кнопка пуск вперед(пуск назад) будет отпущена , движение вперед (назад) не
прекратится так как цепь замкнется по параллельной ветви через
КМ_Вперед(КМ_назад).
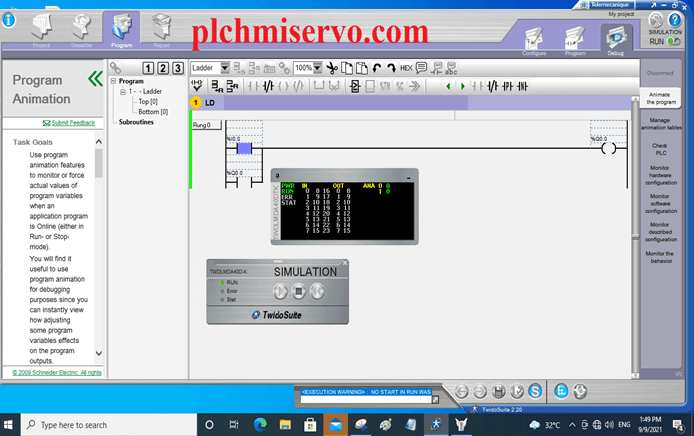
3. Руководствуйтесь
указаниями в разделе справочной системы “6. Симулятор”
Произведите запуск симулятора,
выбрав режим Program ® Program и
кликнув иконку ![]() (Simulation).
(Simulation).
Запустите выполнение контроллером Вашей программы, кликнув иконку RUN ![]() . Для останова программы
. Для останова программы
используйте иконку STOP ![]() .
.
Контролируйте режим работы ПЛК по светодиодным индикаторам RUN, ERR.
Проверьте правильность функционирования программы, изменяя
произвольным образом состояния использованных входов, кликая их номера на
панели отображения аппаратных средств контроллера.
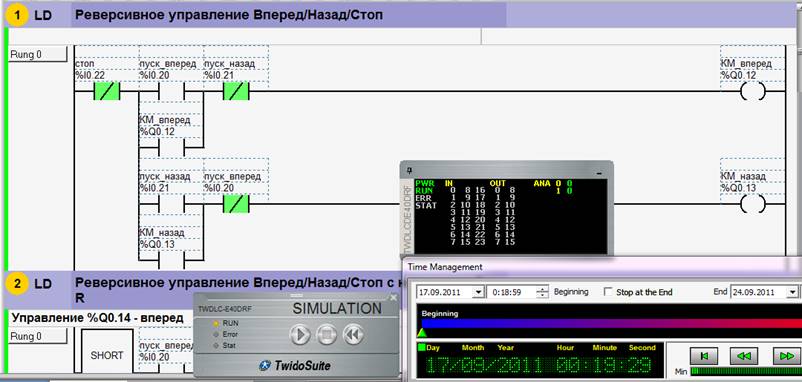
Как видно из этого примера выполнения программы, при нажатии
кнопки пуск вперед контактор КМ_вперед замыкается (движение вперед)
Похожие материалы
- Система стандартов по информации, библиотечному и издательскому делу. Отчёт о научно-исследовательской работе. Структура и правила оформления
- Составление и отладка программ с использованием инструкций функциональных блоков таймеров и счетчиков, сдвиговых регистров, счетчиков шагов
- Средства вычислений и обработки цифровой информации. Составление и отладка программ с использованием инструкций присвоения, сравнения, арифметических операций, логических операций над словами, инструкций сдвига, инструкций преобразования форматов, вычислений в формате с плавающей запятой
Информация о работе
Тип:
Отчеты по лабораторным работам
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание — внизу страницы.
Лабораторная работа в среде Twido Suite — Команды передачи управления, переходов и меток — файл n12.doc
Лабораторная работа в среде Twido Suite — Команды передачи управления, переходов и меток
скачать (252.3 kb.)
Доступные файлы (12):
| n1.dat | |||
| AS_DC35_Print.dsc.xml | |||
| Global.dsc.xml | |||
| n4.xdm | |||
| Twido1.dsc.xml | |||
| n6.xtwd | |||
| n7.bmp | |||
| thumbnail-dsc.bmp | |||
| n9.ini | |||
| n10.xpr | |||
| n11.dat | |||
| n12.doc | 250kb. | 15.01.2010 05:10 | скачать |
- Смотрите также:
- Лабораторная работа №2 в среде Twido Suite — Типові функціональні блоки — таймери та затримки (Лабораторная работа)
- Промышленные контроллеры SIMATIC S7-300/400. Описание системы команд (Документ)
- Лабораторная работа №1 — Апаратна частина програмованих контролерів Schneider Twido. Мова релейно-контакторних схем (Лабораторная работа)
- Лабораторная работа Режим командной строки (Документ)
- Лабораторная работа — Работа в среде демоверсии MS Navision и МS Access (Лабораторная работа)
- Журнал лабораторных работ по дисциплине «Технические средства автоматизации в СУТП».(Ишимбай) (Документ)
- Schneider Electric. Программируемые контроллеры Twido. Справочное руководство по программному обеспечению (Документ)
- Лабораторная работа №4 по дисциплине «Цифровая обработка сигналов» (Документ)
- Schneider Electric. Программируемые контроллеры Twido. Модульные и компактные базовые блоки. Техническое руководство (Документ)
- Контрольная по информационным сетям и телекоммуникациям (Лабораторная работа)
- Лабораторная работа №3 — Сети Петри (Лабораторная работа)
- Лабораторная работа №1 «Пакет Scilab в задачах расчёта и анализа систем управления. Построение частотных характеристик» (Документ)
n12.doc
Програмные средства систем управления
Лабораторная Работа № 4
ТЕМА: Команды передачи управления, переходов и меток.
Мета: ознакомиться с типовыми командами передачи управления, переходов и меток. Выучить их функции и особенности использования в программировании ПЛК.
теоретические сведения:
Время выполнения задачи контролируется сторожевым таймером Tmax (максимальная длительность цикла задачи). Он позволяет выявить ошибки приложения (бесконечные циклы и т. д.) и гарантирует максимальную продолжительность обновления выходов.
При периодическом или циклическом выполнении срабатывание сторожевого
таймера приводит к программной ошибке. Приложение переходит в режим
ОСТАНОВ и устанавливает системный бит %S11 в 1. Перед перезапуском
задачи необходимо при помощи Twido Soft проанализировать причины ошиб-
ки, исправить ошибку в приложении и вернуть программу в режим РАБОТА.
При периодическом выполнении используется дополнительная проверка для обнаружения переполнения периода:
%S19 показывает переполнение периода. Он устанавливается:
— в 1 системой, когда время сканирования больше периода задачи,
— в 0 пользователем.
%SW0 содержит значение периода (0-150 мс). Он:
— Инициализируется при «холодном» пуске значением, определенным
во время конфигурации,
— Может быть изменено пользователем.
Системные слова, предоставляющие информацию о времени сканирования:
%SW11 содержит максимальное время сторожевого таймера (10 — 500 мс ).
%SW30 содержит время выполнения последнего сканирования.
%SW31 содержит время выполнения самого продолжительного сканирования с момента последнего “холодного” пуска.
%SW32 содержит время выполнения самого короткого сканирования с
момента последнего “холодного” пуска.
Событие состоит из:
— источника события, которое может быть определено, как программное или
аппаратное условие, прерывающее основную программу (См. Описание
различных источников событий, стр. 77),
— независимого программируемого объекта, относящегося к событию,
— очереди событий, которая может использоваться для хранения списка
событий до их выполнения,
— уровня приоритета, который определяет порядок обработки событий.
Необходимо использовать программное обеспечение для обработки источников событий, чтобы убедиться, что основная программа была корректно прервана событием, и чтобы вызвать раздел программы, связанный с событием. Время сканирования приложения не влияет на выполнение событий.
Разрешены следующие 9 источников событий:
— 4 условия, связанные с порогами функционального блока VFC (2 события
на %VFC),
— 4 условия, связанные с физическими входами базы,
— 1 периодическое условие.
Источник события может связываться только с одним событием, и должен
сразу определяться TwidoSoft. После определения источника программное беспечение выполняет раздел программы, связанный с событием: каждое событие связано с подпрограммой с меткой SRi: определенной при конфигурации источников событий.
У событий есть 2 возможных приоритета: высокий и низкий. Только один тип события (один источник события) может иметь высокий приоритет, поэтому
остальные события имеют низкий приоритет, и порядок их выполнения зависит от порядка, в котором они были обнаружены.
Существует две очереди задач для управления порядком выполнения задач,
вызываемых событием:
— в одной может хранится до 16 событий с высоким приоритетом (от одного
источника событий),
— в другой может хранится до 16 событий с низким приоритетом (от других
источников событий).
Эти очереди работают по принципу FIFO: первое хранящееся событие будет
обработано первым. Очереди могут хранить только 16 событий, поэтому все остальные события теряются.
События с низким приоритетом будут выполняться только тогда, когда
очередь событий с высоким приоритетом будет пуста.
Инструкции переходов вызывают немедленное прерывание программы и
выполнение её со строки, содержащей метку %Li (i = с 1 до 16 для компактных и с 1 до 63 для других).
Доступны три различные инструкции перехода:
— JMP: безусловный переход
— JMPC: переход, если булевский результат предшествующей инструкции
сравнения равен 1.
— JMPCN: переход, если булевский результат предшествующей инструкции
сравнения равен 0.
Инструкции подпрограмм вызывают выполнение подпрограммы и возврат к выполнению основной программы.
Подпрограммы состоят из трех шагов:
— Инструкция SRn вызывает подпрограмму по метке SRn, если булевский
результат предшествующей инструкции сравнения равен 1.
— Подпрограмма обозначается меткой SRn:, с n = 0 до 15 для
TWDLCAA10DRF, TWDLCAA16DRF и 0 до 63 для остальных контроллеров.
— Инструкция RET, размещенная в конце подпрограммы, возвращает поток
выполнения программы к основной программе.
Задание:
- В программе создать цикл содержащий 100 операций сложения с плавающей точкой .
- Определить для неё длительность цикла сканирования.
- Написать подпрограмму обрабатывающую события от входа %I0.2 по переднему фронту, включать выход %Q0.2.
Время реакции – не более 3 мс. По нажатию нп кнопку %I0.12 длительность цикла увеличивать в 12 раз. Установить WDT так, чтоб он срабатывал для удлиненного цикла.
Код программы на языке Instruction List (IA):

Вывод: в ходе лабораторной работы мы ознакомились с типовыми командами передачи управления, переходов и меток, а также их функции и особенности использования в программировании ПЛК. Мы выяснили, что длительность сканирования может быть изменена в течении программы, в зависимости от длительности выполняемого цикла.
Страницы работы
Содержание работы
Лабораторные
работы по программированию ПЛК Twido в графической среде разработки Twido Suite
Решение
Выполняются на базе программного пакета Twido
Suite, программного
симулятора, интегрированного в Twido Suite, и программируемых контроллеров Twido.
Лабораторная работа 1
Процедура создания проекта в Twido Suite
Цель работы: Изучение состава, режимов работы и
функциональных возможностей программного пакета Twido Suite и встроенного в него
симулятора. Ввод, редактирование и отладка простейших программ.
Задачи:
1. Cоздайте проект в среде Twido. Выберите
контроллер
2. Настройте
подключение к сети Ethernet.
3. Разработайте
и введите в секцию 1 на языке Ladder ( LD —
релейно-контакторная схема) программу, реализующую типовой узел выбора
направления движения.
При нажатии кнопки “Пуск вперед”
контактор должен двигаться вперед ( то есть активизируется одноименный выход “
Контактор вперед”), если не нажата кнопка Пуск назад. Аналогично при нажатии
кнопки пуск назад контактор должен двигаться назад( активизируется выход Контактор
назад), если не нажата кнопка Пуск вперед. При нажатии кнопки стоп – контактор
должен остановиться.
4. Запустите
и отладьте программу в режиме симулятора.
5. Разработайте
и введите в секцию 2 на языке LD
программу, реализующую такой же типовой узел выбора направления вращения, но с
использованием инструкций (S) и (R) для управления выходами
6. Создайте
анимационную таблицу “Узел Вперед-Назад-Стоп” и вставьте в нее используемые
входы и выходы.
7. Разработайте
и введите в секцию 3 на языке LD
программу, реализующую последовательное включение, а затем отключение выхода
при каждом нажатии кнопки
8. Запустите
программу на контроллере.
ПРИМЕЧАНИЕ : воспользуйтесь специальным справочным пособием
по этой лабораторной работе!
Пример решения.
1. Произведите
запуск TwidoSuite в режиме Programming
Mode (Start ® Programs ® Schneider Electric ® TwidoSuite или по пиктограмме![]() на
на
рабочем столе) и создайте проект с именем «Ваша фамилия_1″.Ознакомьтесь
с разделом 2 справочного пособия: Создание нового проекта. При выборе типа
контроллера в окне Describe используйте контроллер TWDLCAE40DRF.
Настройка подключения к контроллеру по Ethernet
Наведите курсор на Ethernet порт(выделен красной рамкой с зеленым указателем), дважды
кликните по порту. В появившемся окне введите настройки конфигурации. Для
этого выберите режим Сonfigured
IP адрес указан на контроллере с
которым вы работаете. Маска подсети 255.255.255.0
Шлюз такой же как и IP адрес, но
последняя цифра – 1.
2. Разработайте
и введите в секцию 1 на языке Ladder ( LD — релейно-контакторная схема) программу,
реализующую типовой узел выбора направления вращения.
Используйте следующие органы
управления, входы и выходы программируемого контроллера:
«Пуск вперед» — %I0.20
«Пуск назад» — %I0.21
«Стоп» —
%I0.22
«Контактор вперед» %Q0.12
«Контактор назад » %Q0.13
Руководствуйтесь указаниями раздела 5.Язык
лестничных диаграмм справочной системы.
Использование в параллельных ветвях нормально разомкнутых
контактов КМ_вперед и КМ_назад обеспечивает самоподхват . Т.е. после того как
кнопка пуск вперед(пуск назад) будет отпущена , движение вперед (назад) не
прекратится так как цепь замкнется по параллельной ветви через
КМ_Вперед(КМ_назад).
3. Руководствуйтесь
указаниями в разделе справочной системы “6. Симулятор”
Произведите запуск симулятора,
выбрав режим Program ® Program и
кликнув иконку ![]() (Simulation).
(Simulation).
Запустите выполнение контроллером Вашей программы, кликнув иконку RUN ![]() . Для останова программы
. Для останова программы
используйте иконку STOP ![]() .
.
Контролируйте режим работы ПЛК по светодиодным индикаторам RUN, ERR.
Проверьте правильность функционирования программы, изменяя
произвольным образом состояния использованных входов, кликая их номера на
панели отображения аппаратных средств контроллера.
Как видно из этого примера выполнения программы, при нажатии
кнопки пуск вперед контактор КМ_вперед замыкается (движение вперед)
Похожие материалы
- Система стандартов по информации, библиотечному и издательскому делу. Отчёт о научно-исследовательской работе. Структура и правила оформления
- Составление и отладка программ с использованием инструкций функциональных блоков таймеров и счетчиков, сдвиговых регистров, счетчиков шагов
- Средства вычислений и обработки цифровой информации. Составление и отладка программ с использованием инструкций присвоения, сравнения, арифметических операций, логических операций над словами, инструкций сдвига, инструкций преобразования форматов, вычислений в формате с плавающей запятой
Информация о работе
Тип:
Отчеты по лабораторным работам
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание — внизу страницы.
[Download] TwidoSuite Download for Windows 10-V2.2 PLC Schneider Software Real
Software TwidoSuite Version 2.2 is used to program Schneider Twido Programmable Logic Controller. Twido Controllers are of two types Compact Besides and Modular Bases. The Compact bases controller has available input /output 10/16/24/40. The Modular Bases PLC has available I/O 20 and 40. Also, we can easily add an extension module. However, today plchmiservo.com would like to share the [Download] TwidoSuite Download for Windows 10 V2.2 with you and how to download the TwidoSuite software and install and program.

Twido Controller has three types of PLC to PC communication ports Serial port, USB port, and Ethernet Port. After Programming we can Simulation by using TwidoSuite Software.
Software ‘Setup Process TwidoSuiteV2.2’:
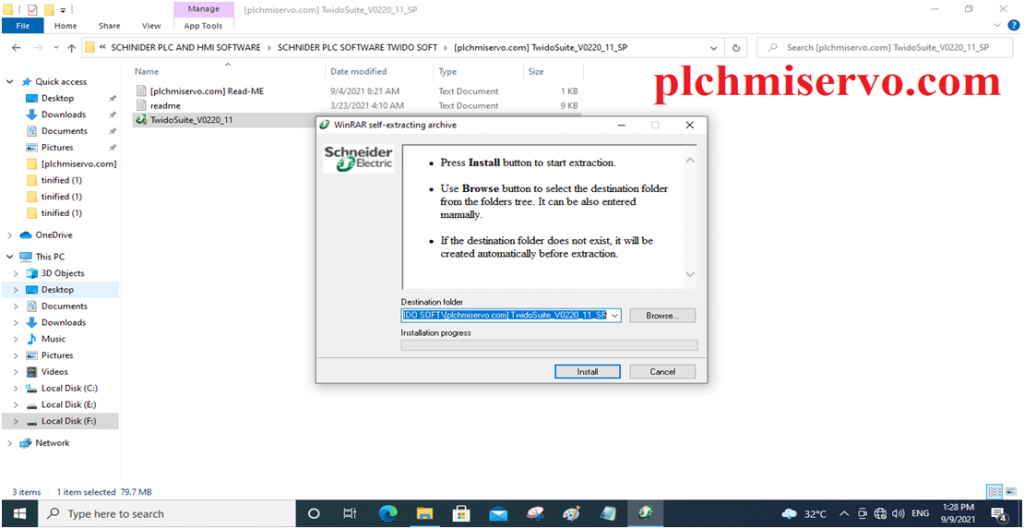
+Step 01: Download the TwidoSuite software from our website plchmiservo.com and unzip the software then Double Click the TwidoSuite_V0220
+Step 02: Press Install.
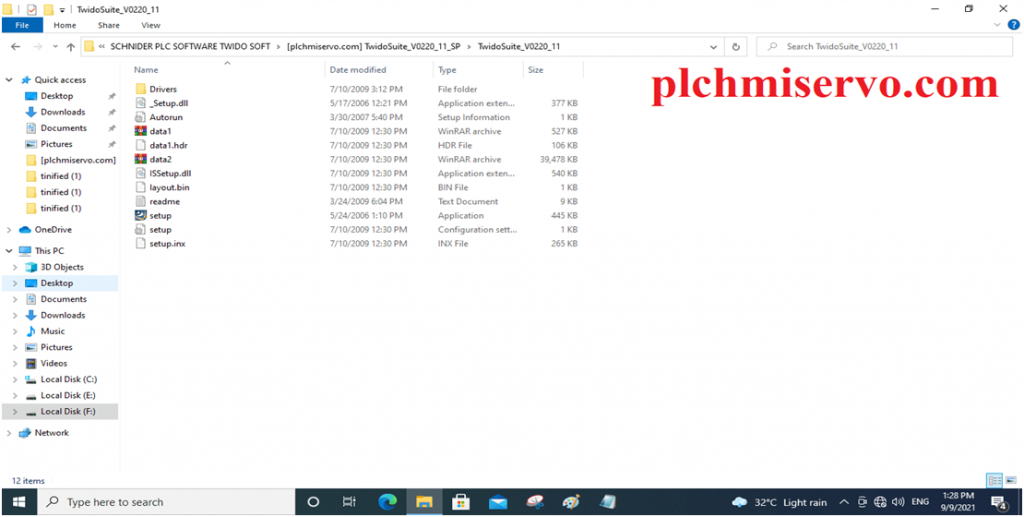
+Step 03: Click Setup.
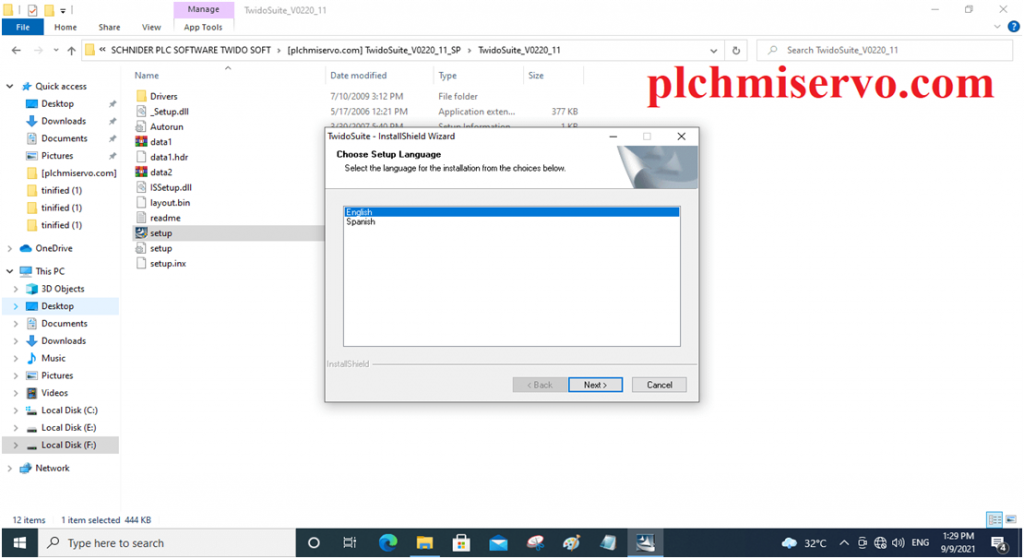
+Step 04: Choose Setup Language English or Spanish then Next.
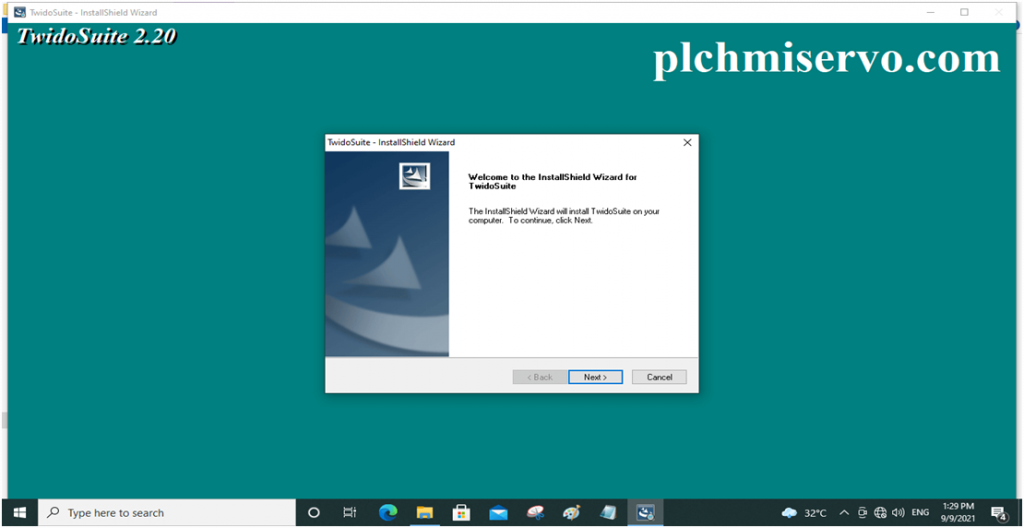
+Step 05: Welcome Installation wizard for TwidoSuite then Click next.
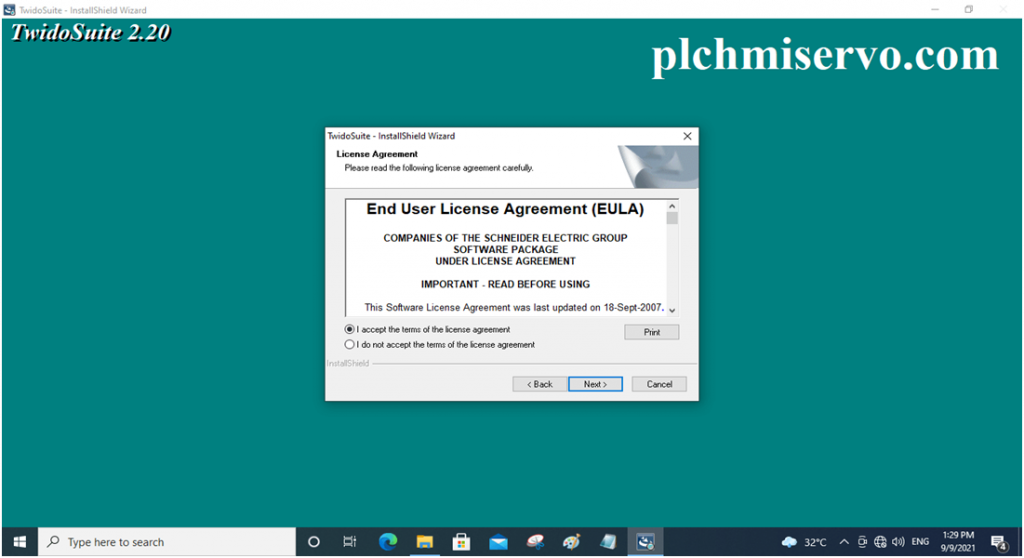
+Step 06: Choose <I accept the license agreement terms> and click next.
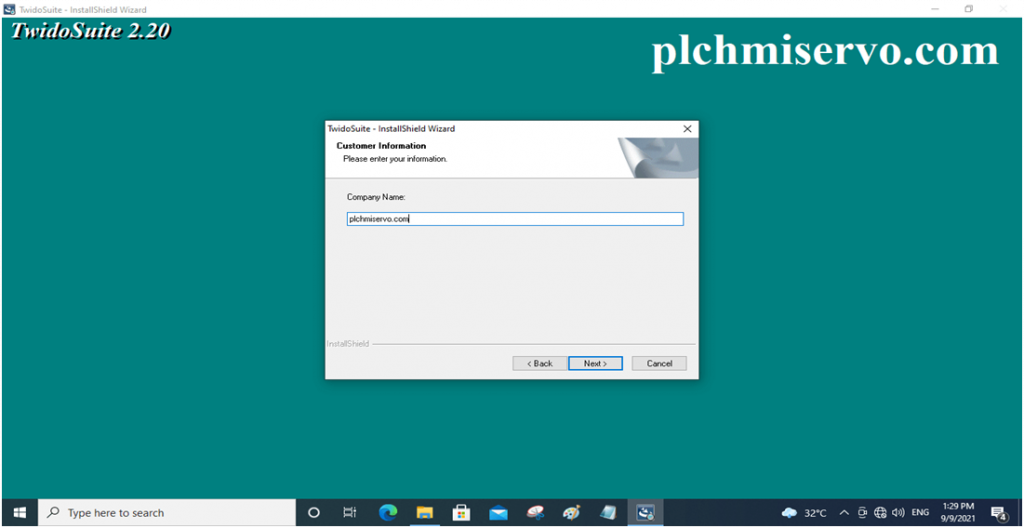
+Step 07: then write Customer Information then press next.
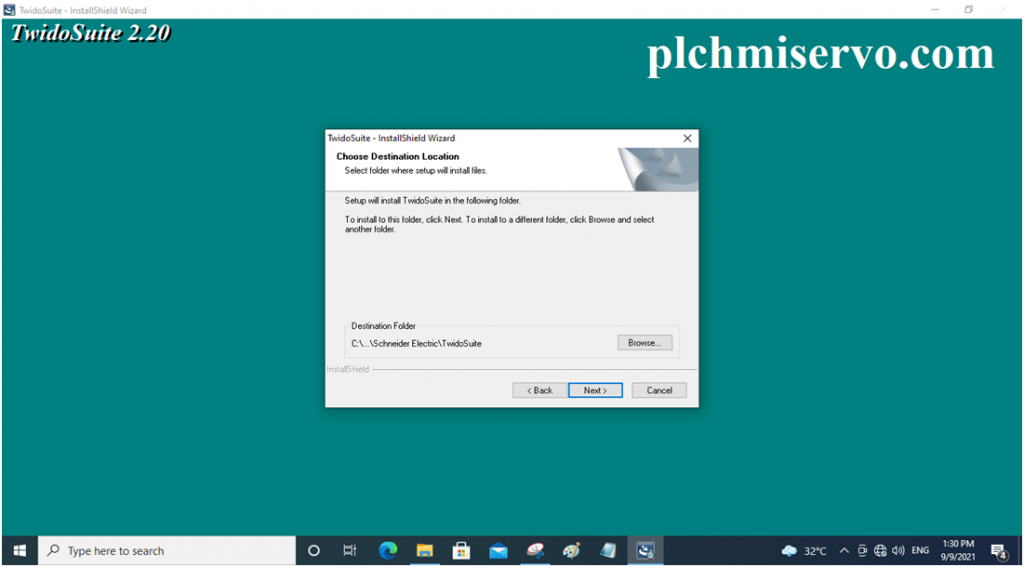
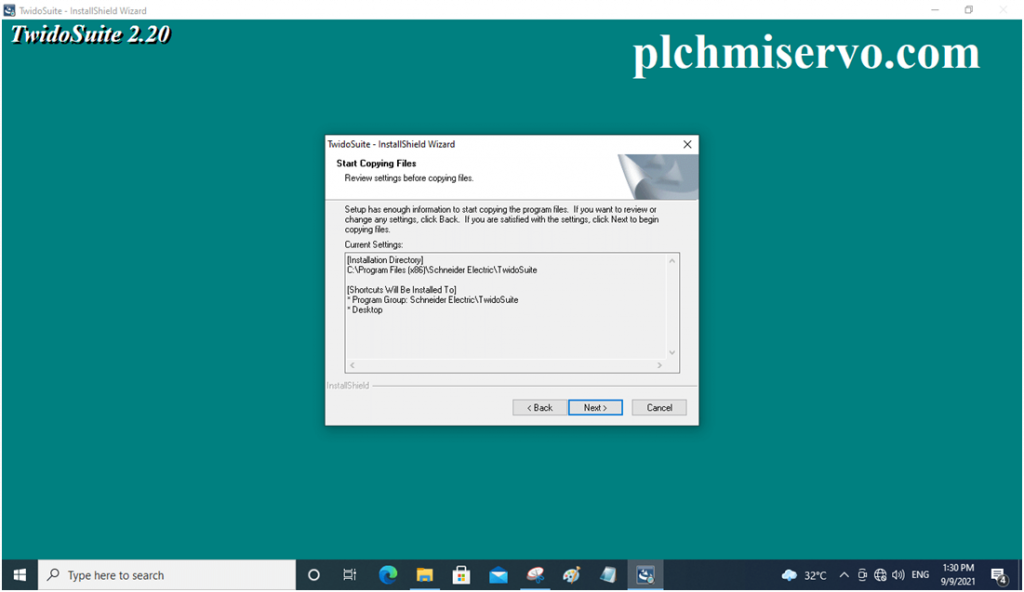
+Step 08: Choose the <destination folder> and Press the next
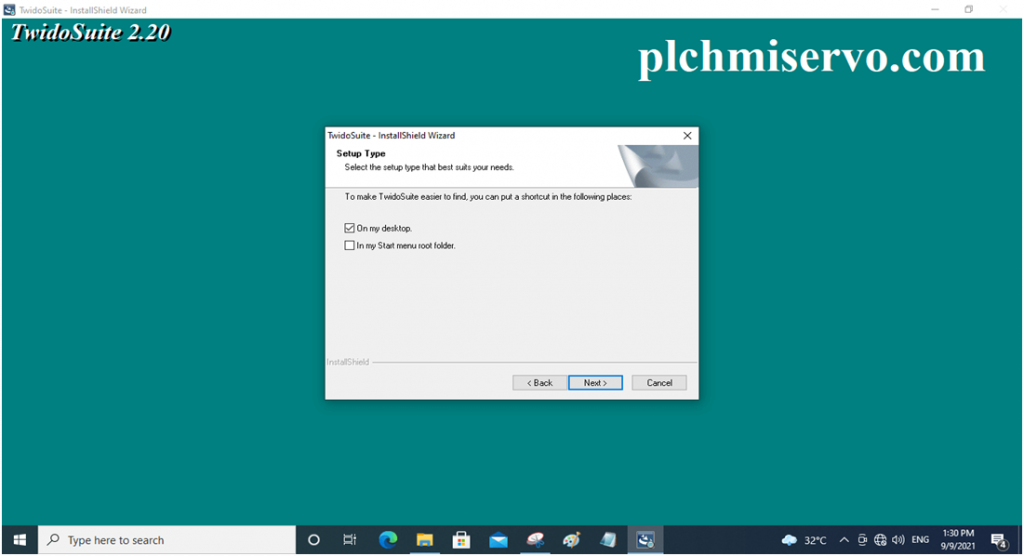
+Step 09: Select setup type and next.
+Step 10: Then select the Program folder and “Next”
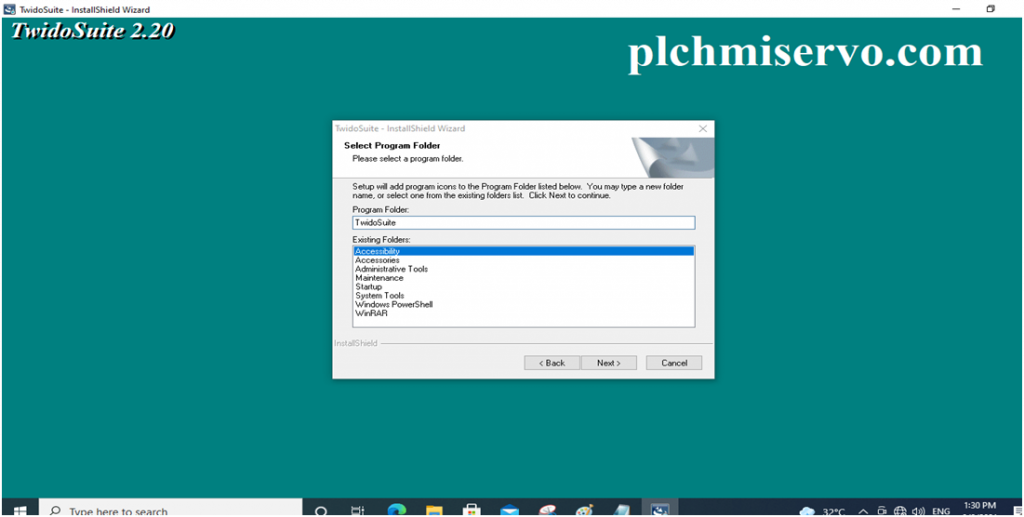
+Step 11: To continue “Press Next”.
+Step 12: Please wait for the installation of the TwidoSuite Software.
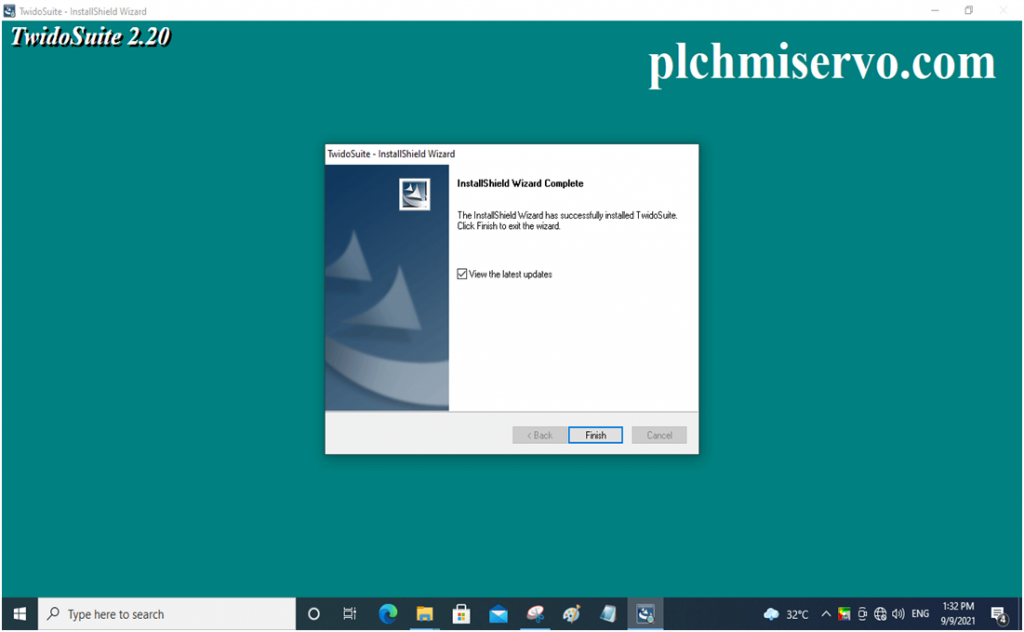
+Step 13: Press “Finish”.
>>>Download TwiidoSuite Software Google Drive Link
We have given the TwidoSuite Software V2.2 google drive link So please click on the link to download the required software.
+ [Download] TwidoSuite V2.2 Schneider orTelemecanique PLC Software
>>>Software TwidoSuite Download another Link:
https://drive.google.com/file/d/1T3715EjhHU9HzJVfKnmGA77mKaHN1-7C/view?usp=sharing
Thanks a lot….If you need any help with programming, Troubleshooting then please contact us via email or WhatsApp number at +8801713722455, Please like this content if you think this content is beneficial for you, Also comments below.
+SoMachine Basic Schneider PLC Software
+Automation Organizer IDEC PLC Software