-
Contents
-
Table of Contents
-
Troubleshooting
-
Bookmarks
Quick Links
SIMATIC
S7-200
Programmable Controller
System Manual
This manual has the order number:
6ES7298-8FA24- — 8BH0
Edition 08/2008
A5E00307987- — 04
Preface, Contents
Product Overview
Getting Started
Installing the S7-200
PLC Concepts
Programming Concepts,
Conventions and Features
S7-200 Instruction Set
Communicating over a Network
Hardware Troubleshooting Guide
and Software Debugging Tools
Open Loop Motion Control with
the S7-200
Creating a Program for the
Modem Module
Using the USS Protocol Library to
Control a MicroMaster Drive
Using the Modbus Protocol
Library
Using Recipes
Using Data Logs
PID Auto-Tune and the PID
Tuning Control Panel
Appendices
Index
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Troubleshooting
Summary of Contents for Siemens SIMATIC S7-200
В этой статье показаны основы работы с ПЛК SIMATIC S7-200 фирмы SIEMENS. Рассмотрены вопросы конфигурирования GKR? соответствия периферии областям памяти, существующие симуляторы. Также напишем первую программу и проверим ее функционирование на симуляторе.
Итак приступим. Будем считать что ПКЛ смонтирован и к нему подключено питание. А также подключен кабель PPI. Для программирования, загрузки и отладки контроллера необходимо установить пакет STEP 7 MicroWin.
Настройка оборудования
Запускаем MicroWin. В открывшемся окне нажимаем Set PG/PC interface.
Выбираем PC/PPI cable.

Нажимаем Properties и на вкладке LocalConnection выбираем номер com порта на который установлен второй конец кабеля (для кабеля PPI – USB номер виртуального com порта).

Закрываем вкладку. В основном окне MicroWin выбираем Communications.
Ставим галочку «search all baud rates» и справа нажимаем «double click to refresh».
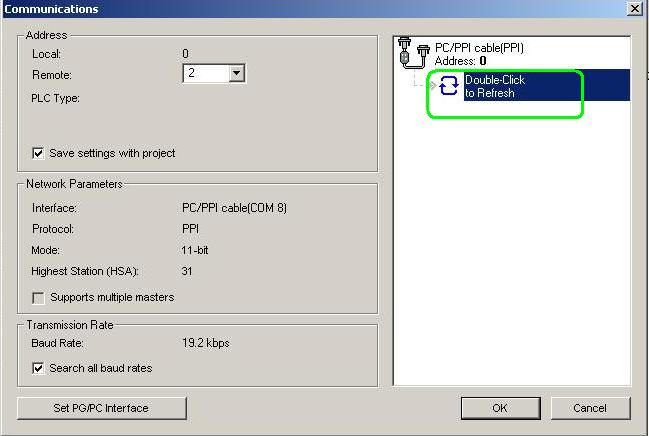
В процессе поиска должен появиться контроллер.
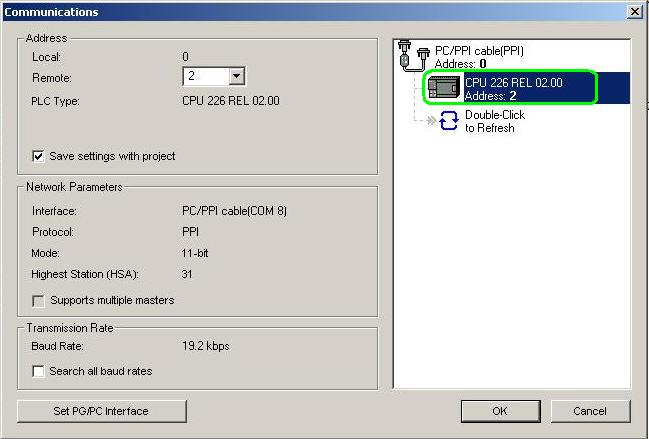
Выбираем его и нажимаем OK.
Теперь соединение с ПЛК установлено и можем управлять им переводя его в разные режимы работы, залить в него программу, скачать из него программу, отлаживать программу в реальном времени и т.д.
Теоретические основы
Теперь коротко расскажу как работает ПЛК. Сначала считываются все входа и переносятся в так называемую область отображения входов. Потом идет цикл выполнения программы с обработкой эти вводов, выполнением каких либо математических операций и формированием по результату выполнения области отображения выходов. И в самом конце происходит перенос из области отображения выходов на реальные выходные регистры. После этого цикл повторяется. Из этого следует, что если в процессе выполнения программы происходит например включение какого либо выхода в состояние единицы, а следующие за этим инструкции переводят его в 0, то состояние входа не измениться в процессе выполнения программы. В этом главное отличие ПЛК от микроконтроллеров где воздействие на выхода осуществляется непосредственно внутри цикла программы записью значения в регистр выходов.
Программа выполняется в основном цикле OB1.
В процессе выполнения программы могут запускаться соответствующие подпрограммы и вызываться различные функции. Также в процесс выполнения программы может вызываться настроенное ранее прерывание, после выполнения которого продолжиться выполнение основного цикла.
Память в ПЛК делиться на области отображения дискретных входов (обозначается латинской буквой I), дискретных выходов (обозначается буквой Q), аналоговых входов (обозначается буквами AIW), аналоговых выходов (отображается буквами AQW). Аналоговые входа имеют выход размерности 16 бит и соответственно формат «слово» WORD. Если вход специализированный (например под термосопротивление или термопару) то выход будет иметь значение температуры с десятыми долями градуса Цельсия (например аналоговый вход под Pt100 AIW10 и температура на датчике 36.6 С то AIW = 366). С дискретными входами и выходами можно общаться как побитно (например I0.0) означает дискретный вход I0 бит 0), так и побайтно (например IB2). Аналогично и дискретными выходами. Важно заметить, что выхода можно не только устанавливать но и опрашивать.
Существует меркерная память, она сохраняет свои значения при пропадании питания, (обозначается буквой М) например M0.0 MB2 MW4 MD6. Есть так называемые системные меркеры (обозначаются SM), в них хранятся всяческие системные данные доступные для пользователя (об этом будет ниже). B обычная память (отображаемая буквой V) например VB0, VD4, VW10. Также существуют аккумуляторы для хранения промежуточных результатов при вычислении они имеют разрядность 32 бита и обозначаются AC0, AC1, AC2, AC3.
Память разбивается на биты, байты (VB) — 8 бит, слова (VW) — 16 бит, двойные слова (VD).
Математически операции выполняются на числами со следующими разрядностями.
Integer 16 бит от -32768 до +32767
Double integer 32 бита от -2147483648 до +2147483647
Real 32 бита от -1.175495E-38 до -3.402823E+38
Первая программа
Напишем простую программу опрашивающую дискретный вход и устанавливающий дискретный выход.
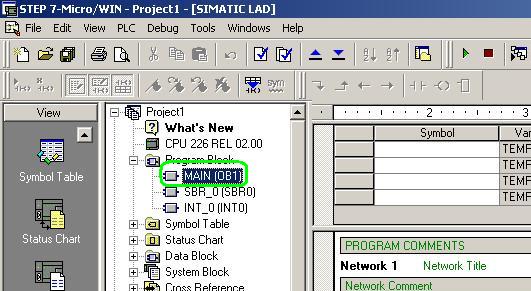
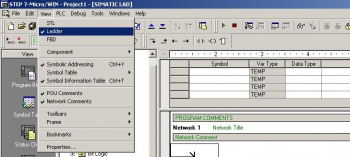
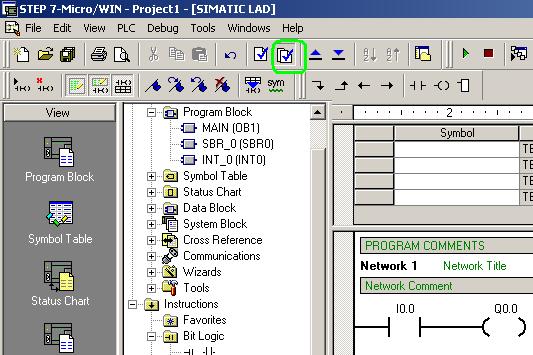
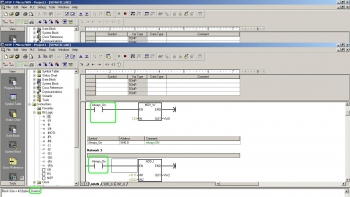
В главном окне MicroWin нажимаем View -> Ladder (это означает что писать мы будем на языке LAD).
Выбираем OB1 (основной цикл программы) и дважды по нему щелкаем.
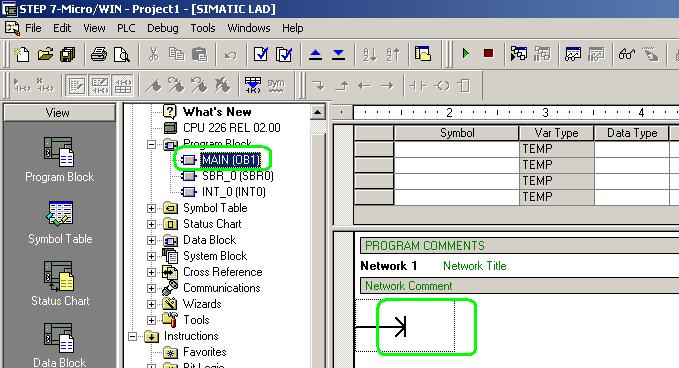
В панели слева выбираем Instruction -> Bit Logic и два раза щелкаем по значку -||- Normaly open
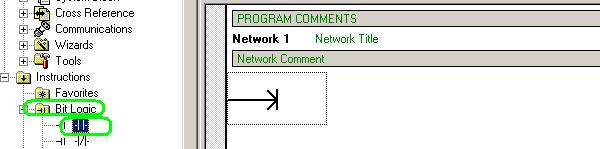
(это так называемы нормально разомкнутый контакт, что означает что он замкнется и пропустит сигнал дальше если его состояние равно «1». В появившемся над контактом поле со знаками вопроса
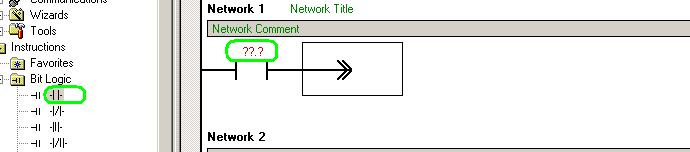
вписываем I0.0 и нажимаем Enter, что означает мы опрашиваем дискретный вход I0.0. Опять слева из меню Instruction -> Bit Logic выбираем Output
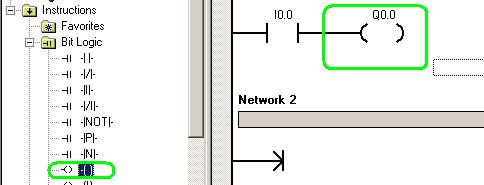
и щелкаем два раза. В появившемся над выходом поле со знаками вопроса вписываем Q0.0 (число под оператором установки или сброса бита соответствует числу сбрасываемых или устанавливаемых битов в этом байте начиная с указанного, например если написать снизу 1 то установиться только указанный бит и так далее) и нажимаем Enter, что означает мы устанавливаем дискретный выход Q0.0.
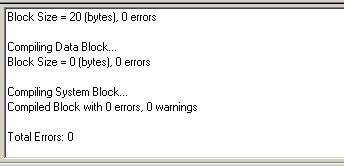
Все простейшая программа готова. Нажимаем compile All.
В нижней статусной строке видим, что размер кода 20 байт, ошибок и предупреждений нет.
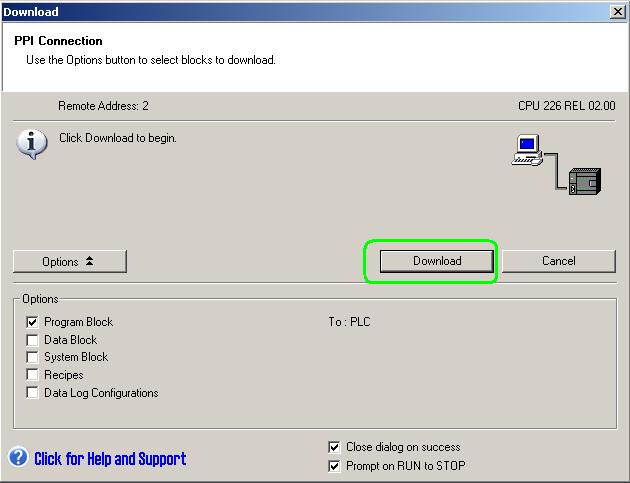
Нажимаем Download.

В открывшемся окне нажимаем Download. Произойдет заливка программы и окно закроется. Переводим контроллер в состояние RUN
Теперь если подать на вход I0.0 +24В то на выходе Q0.0 появиться +24В. Состояние входов выходов также отображается на светодиодах контроллера.
Теперь краткое отступление для тех кто хочет попробовать работать с ПЛК но не имеет его. Существуют два симулятора S7-200.
S7200SIM от SUNLiGHT software —
позволяет посредством виртуального моста com – com устанавливать связь MicroWin с эмулятором ПЛК. Не поддерживает аналоговые входа выхода. Проект похоже мертв.
S7_200 от http://personales.ya.com/canalPLC/

текущая версия 3.0. Не работает напрямую с MicroWin но позволяет загружать программу через awl файлы. Поддерживает аналоговые входа выхода. Просмотр состояния программы.
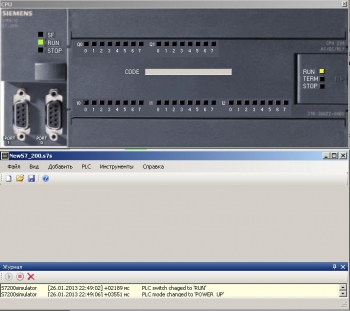
Вот как выглядит наша программа при работе в контроллере.
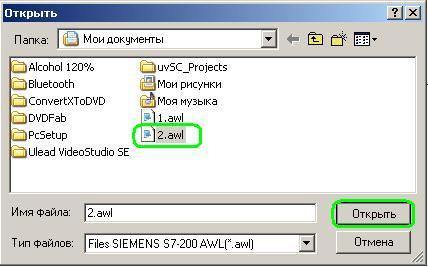
В MicroWin нажимаем File — > Export. Даем имя файлу например 1 и нажимаем сохранить.
Запускаем симулятор S7_200.
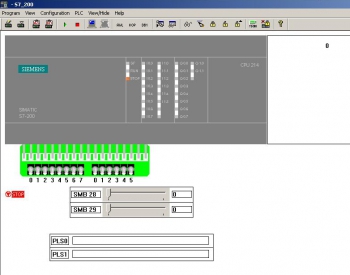
Нажимаем Program -> Load Program. Оставляем галочку logic block и нажимаем Accept.
В открывшемся окне выбираем наш файл и нажимаем открыть.
Нажимаем PLC -> RUN.

Теперь если мы передвинем крайний левый тумблер вверх то сработает выход Q0.0.
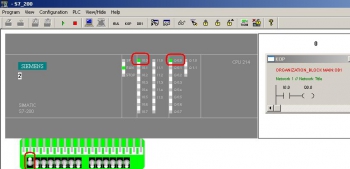
Отлично, наша программа работает.
Опять небольшое отступление. Как определить по каким адресам находятся входа и выхода? Это очень просто.
Во первых можно просто посчитать их следующим образом. Все входа сгруппированы побайтно, поэтому предположим что ПЛК (без модулей расширения) содержит в себе 16 дискретных входов, 8 дискретных выходов, 2 аналоговых входа и 1 аналоговый выход. Они будут иметь адреса I0.0 — I0.7 и I1.0 — I1.7. Дискретные выходные Q0.0 — Q0.7. Аналоговые входные AIW0 и AIW2 (так как занимают по два байта каждый). Аналоговый выход AQW0. Теперь если мы добавим модуль расширения с 16 дискретными входами и 16 дискретными выходами. Они автоматически получат адреса I2.0-I2.7 I3.0 — I3.7. Выхода Q1.0-Q1.7 Q2.0 — Q2.7 т.е. адресация увеличивается линейно по байту на каждые 8 дискретных входов выходов, начиная с 0 в ПЛК. Аналоговые увеличивают адресацию по словно (через один) начиная с 0 в ПЛК.
Можно посмотреть присвоенные входам выходам адреса в ПЛК из MicroWin. Для этого в MicroWin нажимаем PLC -> information
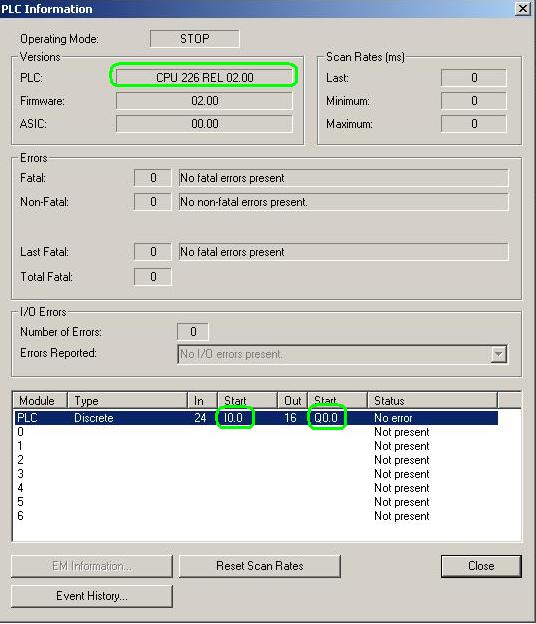
В таблице видим, что CPU у нас 226 имеет 24 дискретных входа начиная с I0.0 и 16 выходов начиная с Q0.0
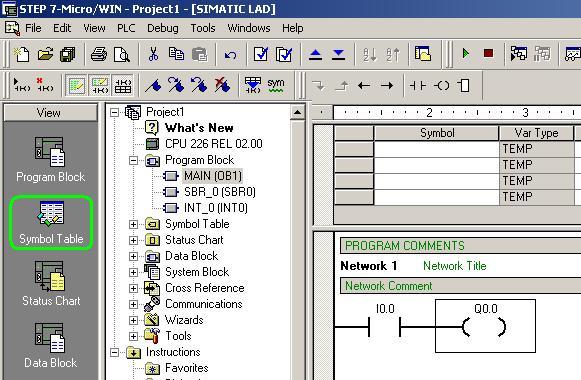
Идем дальше. Естественно при программировании ПЛК с большим объемом входных выходных сигналов и сложной математикой работать с абсолютными адресами сложно. Символьная адресация тут тоже возможна. В MicroWin нажимаем Symbol Table.
В открывшемся окне
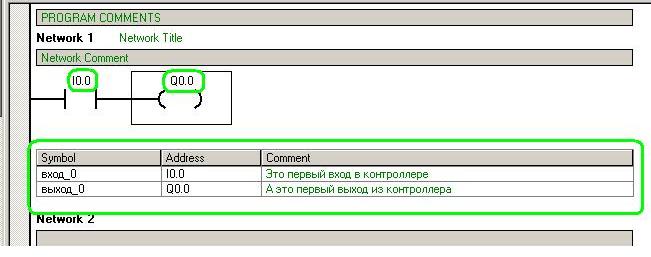
Вбиваем в поле address абсолютный адрес, в поле symbol символьное имя, в поле comment комментарий который тоже можно включить на отображение. Наименование вкладки можно изменить. Можно также добавить новую вкладку для удобства группировки дискретных входов выходов, аналоговых, результатов математических вычислений и т.д.
Возвращаемся в OB1 и видим, что появилась табличка под кодом с сопоставлением символьного имени и абсолютного адреса. (если не отображается то нажать View -> Symbol Information Table.
Но в коде все по прежнему. Нажимаем Viev -> Symbol Table -> Apply Symbol to Project.
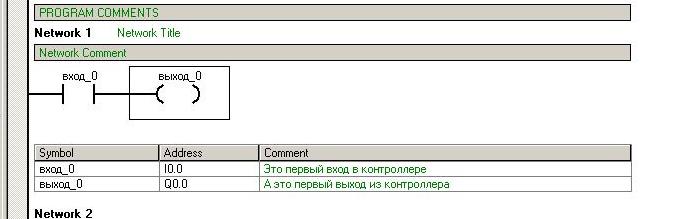
Вот теперь все отлично.
Вернемся в Symbol Table. Я рассказывал выше о специальных системных меркерах. Чтобы не лазить каждый раз в help я всегда проделываю следующие действия. Правой кнопкой мыши вызывается меню Insert -> S7-200 Symbol Table

Появляется вкладка S7-200 Symbols. Если прочитать комментарии то видно что системные меркеры содержат много полезного. Например бит SM0.1 First_Scan_On – выполняется только при первом цикле после включения питания. Это часто используется для загрузки первоначальных данных. Например в программе мы используем переменную по адресу VW0 для сравнения дальше в программе с аналоговым входом. Причем эта переменная будет потом доступна для изменения (типовая уставка аварийного значения).При этом мы хотим загрузить в нее какое либо первоначальное значение. Тогда код будет выглядеть так
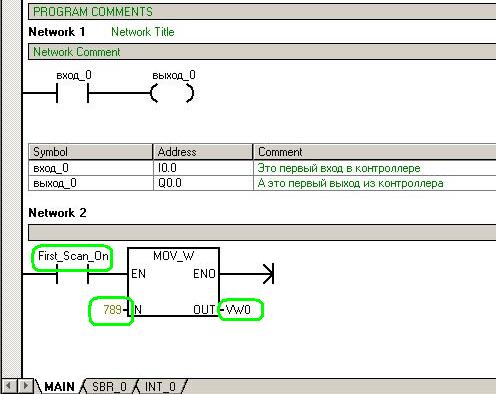
В переменную VW0 загрузиться значение 789 при первом цикле программы и в дальнейшем это значение будет доступно для изменения.
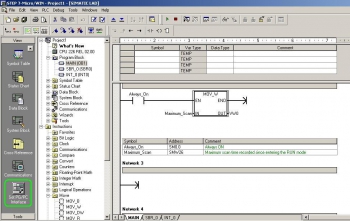
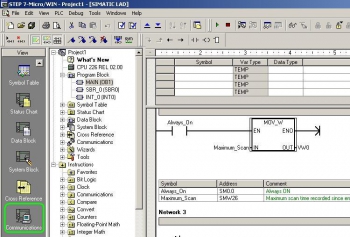
Часто используется системный меркер SM0.0 Always ON – используется для подключения математических операций и загрузки в регистр в языке LAD. Пример
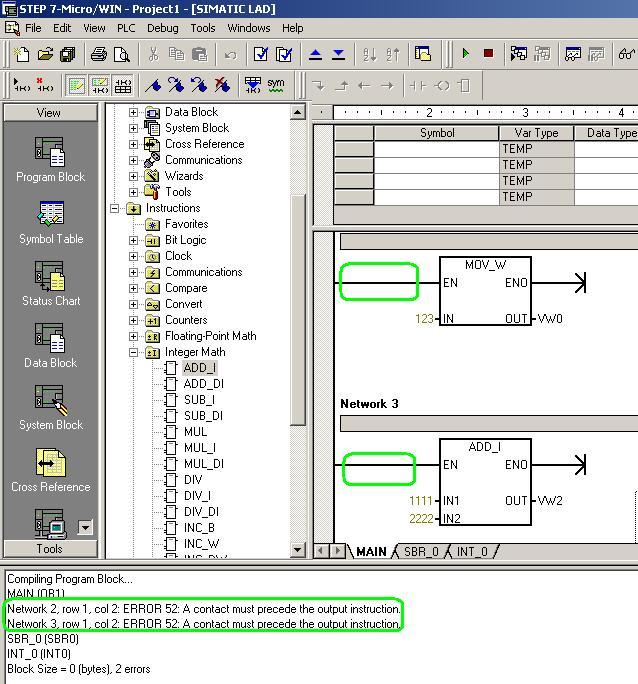
Две ошибки. По правилам языка LAD перед подобными операциями должна стоять инструкция опроса контакта, а так как этот должен быть всегда замкнут то используют системный меркер SM0.0
Теперь без ошибок.
Еще два интересных меркера SM0.4 SM0.5 – один переключается с периодом 1 секунда а второй с периодом 1 минута. На их базе можно реализовать цикличное выполнение какой либо подпрограммы или например простую мигалку. В OB1 набираем код
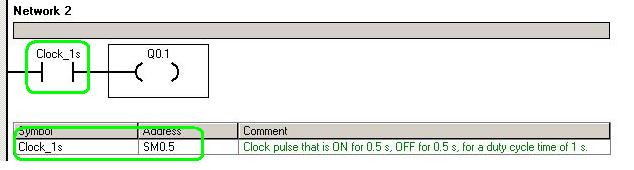
Экспортируем в awl. Загружаем в симулятор s7_200. Переключаем ПЛК в RUN и видим что выход Q0.1 переключается каждые 0,5 секунды.
Интересны и иногда полезны еще два специальных меркера SMW24 и SMW26 – они содержат минимальное и максимальное время выполнения цикла программы OB1 в миллисекундах.
В следующей статье рассмотрим основные операции выполняемые над входами выходами и аналоговыми данными. Рассмотрим конфигурирование и использование таймеров и счетчиков, а также создание и работу с функциями.
Теги:
![]()
S7-200CN
|
S7-200CN |
3 |
|
S7-200CN CPU |
17 |
|
19 |
|
|
21 |
|
|
RTD |
22 |
|
EM253 |
23 |
|
SIWAREX MS |
24 |
|
25 |
|
|
HMI |
27 |
|
1 |
29 |
|
|
1-1 |
29 |
|
|
1-2 |
31 |
|
|
1-3 |
33 |
|
2 DIP |
34 |
|||||||||||||||||||||||||||||||||||||||||
|
2-1 |
EM231 EM235 DIP |
34 |
||||||||||||||||||||||||||||||||||||||||
|
2-2 |
EM231 DIP |
34 |
||||||||||||||||||||||||||||||||||||||||
|
2-3 |
EM231 DIP |
35 |
||||||||||||||||||||||||||||||||||||||||
|
3 |
36 |
|||||||||||||||||||||||||||||||||||||||||
|
4 S7-200CN |
37 |
|||||||||||||||||||||||||||||||||||||||||
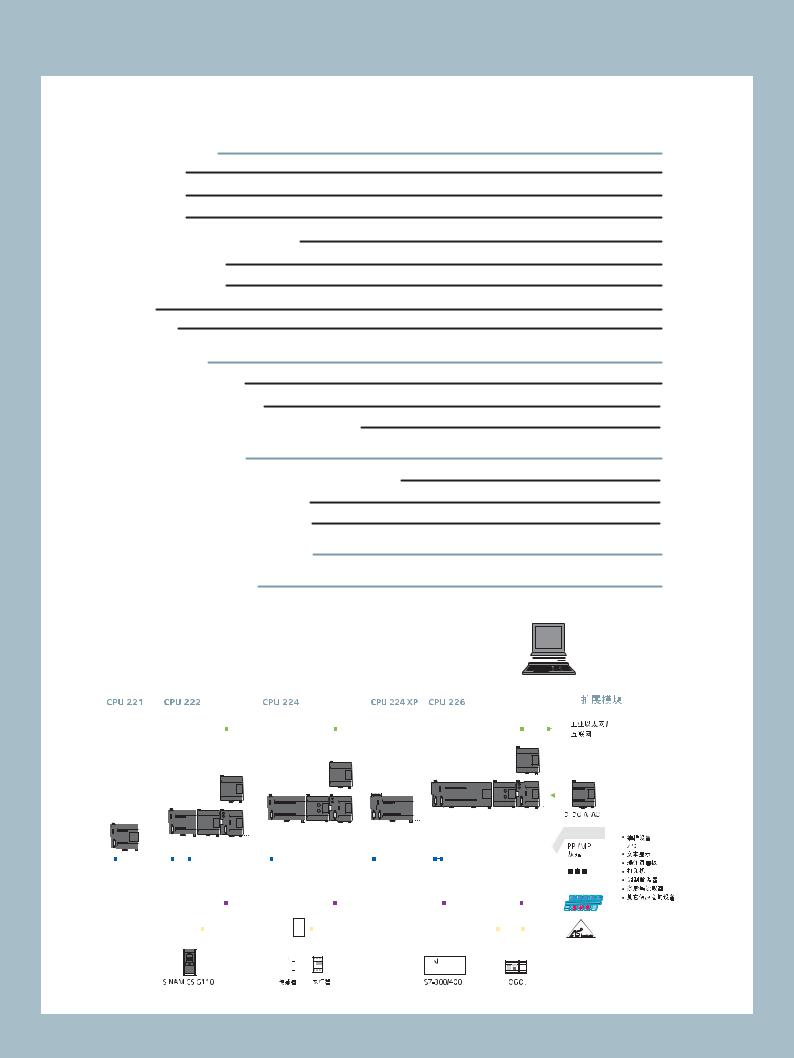
2
|
• I/O |
||
|
• |
S7-400 |
|
|
• |
||
|
• |
S7-300 |
|
|
S7-300C |
||
|
S7-1200 |
||
|
S7-200CN |
||
|
LOGO! |
||
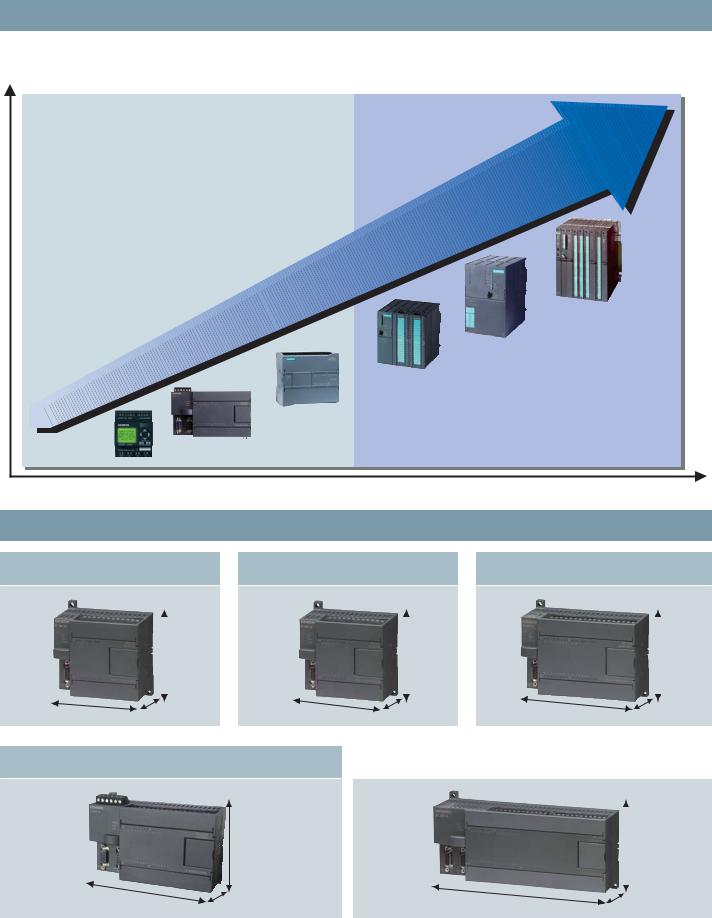
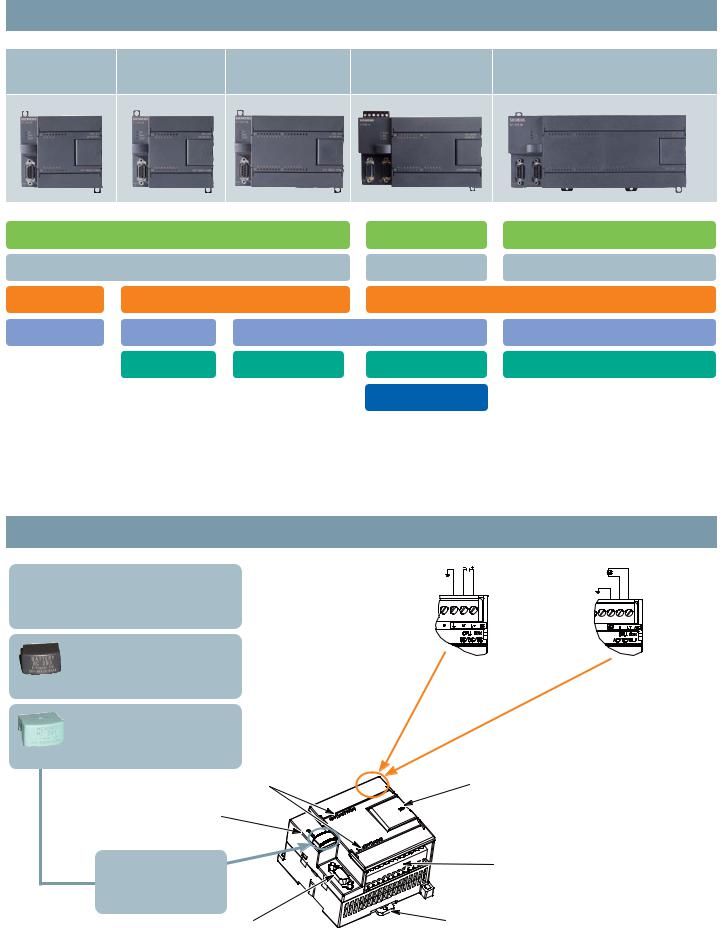
S7-200CN CPU
|
CPU 221(6DI / 4DO) |
CPU 222 CN (8DI / 6DO) |
CPU 224 CN (14DI /10DO) |
|
80mm |
80mm |
80mm |
||||||
|
90mm |
62mm |
90mm |
62mm |
120.5mm |
62mm |
|||
|
CPU 224XP CN / 224XPsi CN (14DI / 10DO + 2AI / 1AO) |
CPU 226 CN (24DI / 16DO) |
|||||||
3
S7-200CN CPU
|
S7-224XP CN |
|||
|
S7-221 |
S7-222 CN |
S7-224 CN |
S7-226 CN |
|
S7-224XPsi CN |
|
30 KHz |
||
|
20 KHz |
||
|
1 |
1 — 3 |
|
|
10 |
94 |
|
|
16 |
44 |
■DI/DO
■AI/AO
■CPU
S7-200CN CPU

√
221/222 CN CPU
√ 200
√200
√ 文件和通用文件存储
|
LED |
I/O LED |
|
/ |
|
|
(SF / DIAG) |
|
|
RUN |
|
|
STOP |
CPU
|
30 + 200 KHz |
30 KHz |
|
100 KHz |
20 KHz |
|
2 — 4 |
|
|
224 |
256 |
|
45 |
44 |
|
2AI / 1AO |
|
20-28V DC |
85-264V DC |
|
@ 47-63Hz |
RUN/STOP
CPU
I/O
( CPU 224 CN CPU 224XP CN
CPU 224XPsi CN CPU 226 CN )
35mm DIN
4

S7-200CN CPU
AI & AO
EM

 CPU
CPU
√ √ √
|
SMB28 – 0 |
|||||
|
RS 232 / 485 |
24V DC |
||||
|
SMB29 – 1 |
|||||
S7-200CN CPU PC
|
“ ” CPU |
CPU LED |
|
|
√ S7-224 CN |
√ CPU |
|
|
√ S7-224 XP CN |
||
|
√ |
||
|
√ S7-224 XPsi CN |
||
|
√ S7-226 CN |
PC PLC
Micro/Win
S7-200CN CPU
USB /
RS 232
PC – PPI
5
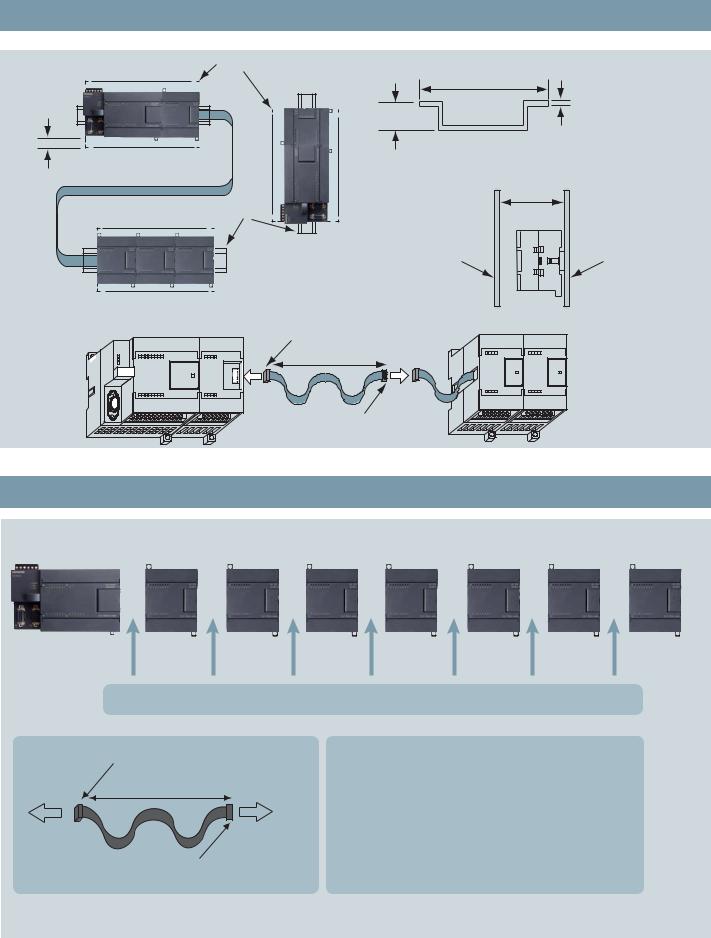
S7-200CN
35 mm
1 mm
75 mm
DIN
25 mm
80cm 10pin
75 mm
35mm DIN
DIN
80 cm
S7-200CN
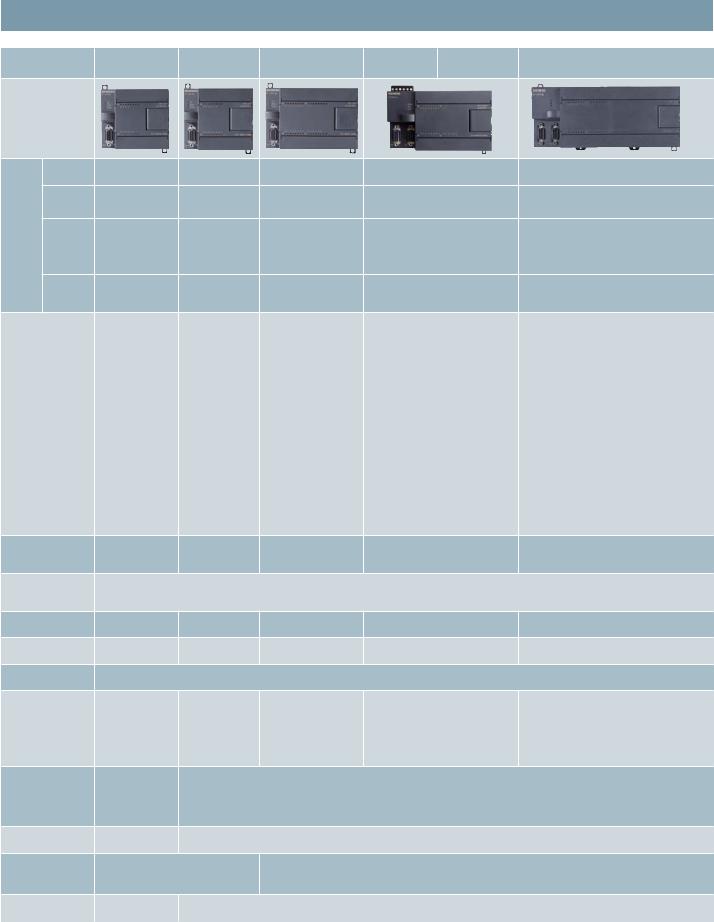
S7-222~22□ CN
|
— 8 DI / 8DO 16DI / DO16 32DI / 32DO |
|
|
EM 231 EM 232 EM 235 |
|
|
EM 241 EM 253 EM 277 |
|
6
S7-200CN
|
S7-221 |
S7-222 CN |
S7-224 CN |
S7-224XP CN S7-224XPsi CN |
S7-226 CN |
|||
|
I/O |
6 DI / 4 DO |
8 DI / 6 DO |
14DI / 10DO |
14DI / 10DO |
24DI / 16D0 |
||
|
4 |
4 |
4 |
4 |
4 |
|||
|
HSC |
4 30 kHz |
4 30 kHz |
6 30 kHz |
2 200 kHz + 4 30kHz |
6 30 kHz |
||
|
A/B |
A/B |
A/B |
A/B |
A/B |
|||
|
2 20 kHz |
2 20 kHz |
2 20 kHz |
2 100 kHz |
2 20 kHz |
|||
|
• AC DC • AC DC |
• AC DC |
||||||
|
• 1 |
• |
||||||
|
• AC DC |
• |
• AC DC |
|||||
|
• 1 |
• EM 277 |
• EM 277 |
• |
||||
|
• EM 277 |
• EM 277 |
||||||
|
• 2 |
|||||||
|
• PID |
• 2 |
• 2 |
|||||
|
CPU / |
|||||||
|
• |
• PID |
• PID |
|||||
|
• PID |
• PID |
||||||
|
• |
• |
||||||
|
• |
• |
||||||
|
• LED |
• |
• |
|||||
|
• |
|||||||
|
• |
• LED |
• LED |
|||||
|
• LED |
• LED |
||||||
|
• |
• |
||||||
|
• |
• |
||||||
|
I/O |
6 DI / 4 DO |
48 DI / 46 DO |
114 DI / 110 DO |
114 DI / 110 DO |
128 DI / 128 DO |
||
|
0.22 µs |
|||||||
|
( ) |
|||||||
|
4096 B |
4096 B |
12288 B |
16384 B |
24576 B |
|||
|
2048 B |
2048 B |
8192 B |
10240 B |
10240 B |
|||
|
CPU |
|||||||
|
I/O |
n.a. |
16 AI / 8 AO |
32 AI / 28 AO |
2AI / 1 AO |
32 AI / 28 AO |
||
|
16 |
44 |
AI 32 / AO 29 |
44 |
||||
|
45 |
|||||||
|
16 15 +1 |
|||||||
|
n.a. |
T S R E N K J TC |
||||||
|
100,200,500,1000 ohm Pt100 |
|||||||
|
n.a. |
Web SIWAREX |
||||||
|
Modbus / |
AS-Interface Profibus-DP |
||||||
|
/ GPRS Modbus / |
|||||||
|
Modbus RTU |
Modbus RTU AS-Interface |
7

S7-200CN
|
S7-222~226 CN |
CP 243-1 IT |
CP 243-1 |
|
EM 277 |
PPI / MPI
PPI / MPI
|
GPRS |
USS |
ASCII |
AS-Interface |
|||||
ModbusRTU
/
SMS-E-mail
S7-200CN HMI
TP277
TP177
OP77
OP73
K-TP 178micro
TD400C
S7-200CN CPU
•Micro/Win V4.0
•WinCCFlexible2008
8
HMI CPU
K-TP 178micro
NETR / NETW
√CPU HMI
NETR / NETW
√ TD400C CPU
|
TD400C |
TD400C |
TD400C |
||
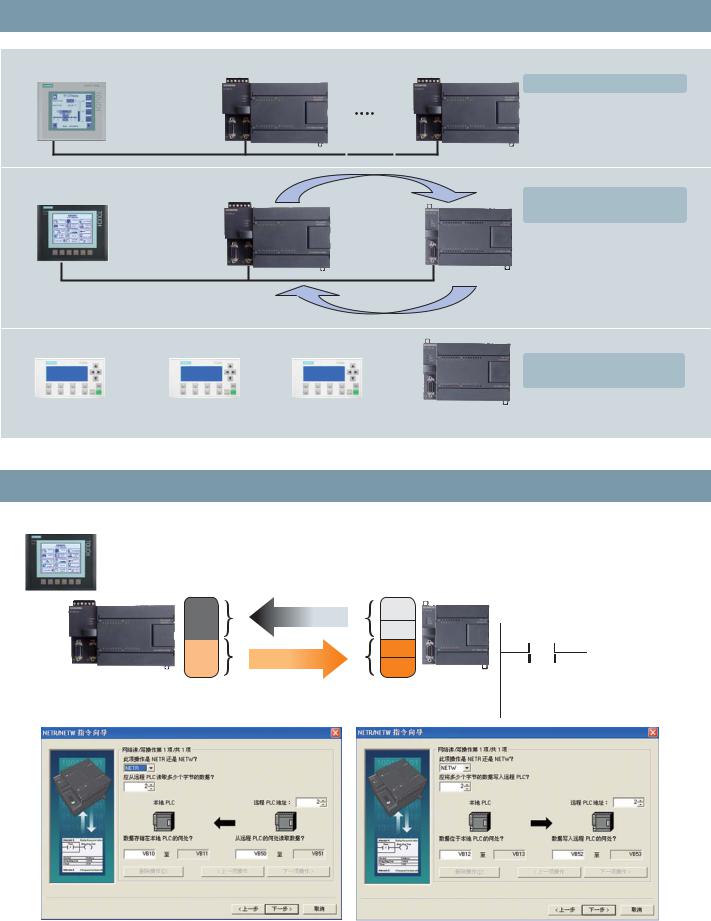
S7-200CN CPU CPU “ — ”
|
K-TP 178micro |
Micro/Win |
|||||||||||||
|
CPU CPU |
||||||||||||||
|
PLC #1 |
NETR |
PLC #2 |
||||||||||||
|
VB10 |
VB50 |
|||||||||||||
|
10111001 |
VB51 |
|||||||||||||
|
VB11 |
SM0.0 |
|||||||||||||
|
NET_EXE |
||||||||||||||
|
VB12 |
VB52 |
EN |
||||||||||||
|
01101011 |
||||||||||||||
|
VB13 |
VB53 |
|||||||||||||
|
NETW |
1 |
Timeout Cycle |
M0.0 |
|||||||||||
|
PROFIBUS |
Error |
M0.1 |
||||||||||||
9

S7-200CN
S7-224XP CN S7-224XPsi CN /
|
ILOAD |
VLOAD |
1 |
|
|
0 |
|||
|
M |
I V |
M A+ B+ |
S7-224XP CN
S7-224XPsi CN
S7-200CN + SIWAREX MS
|
CPU S7-222 CN |
SIWAREX MS |
|
TD400C |
|
100kg |
100kg |
|||
|
WSG + |
U S+ |
|||
|
U F+ |
||||
|
DISPLAY |
_ |
|||
|
+ |
||||
|
100.00 |
TTY |
|||
|
PC SIWATOOL MS |
||||
|
_ |
U |
_ |
||
|
F |
||||
|
U |
_ |
|||
|
S |
||||
|
U m |
U m |
SIEMENS SIWAREX
10
![]()
S7-200CN PWM
|
Q0.0 |
0 |
|||||
|
Q0.1 |
||||||
|
1 |
||||||
S7-224XP CN
S7-224XPsi CN
Micro/Win
PWM
PWM
|
SM0.0 |
PWM0_RUN |
||
|
I0.0 |
EN |
||
|
RUN |
|||
|
10 |
Cycle Error VB10 |
||
|
10000 |
Pusle |
||
S7-200CN PTO
|
Q0.0 |
0 |
||||
|
Q0.1 |
1 |
||||
S7-224XP CN S7-224XPsi CN
|
50% |
50% |
50% |
50% |
|
Off |
On |
Off |
On |
Micro/Win
√
|
SM0.0 |
Q0_0_MoveRel˜ |
|||||
|
EN |
||||||
|
I0.0 |
||||||
|
EXECU˜ |
||||||
|
Num_P˜ Done |
Q0.0 |
|||||
|
Velocity |
||||||
|
Direction |
||||||
11

S7-200CN HSC
1
|
S7-224XP CN |
|||||
|
S7-224XPsi CN |
|||||
|
0 |
1M 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 2M 1.0 1.1 1.2 1.3 1.4 1.5 |
M L + |
|||
|
1 |
|||||
|
2 |
|||||
|
3 |
|
5 |
24VDC |
||||||||||||||||||||||
|
6 |
|||||||||||||||||||||||
|
13 |
7 |
2 |
|||||||||||||||||||||
|
8 |
|||||||||||||||||||||||
|
9 |
|||||||||||||||||||||||
|
HSC0 |
I0.0 |
I0.1 |
I0.2 |
||||||||||||||||||||
|
10 |
A/B |
||||||||||||||||||||||
|
HSC1 |
I0.6 |
I0.7 |
I1.0 |
I1.1 |
|||||||||||||||||||
|
11 |
HSC |
||||||||||||||||||||||
|
HSC2 |
I1.2 |
I1.3 |
I1.4 |
I1.5 |
|||||||||||||||||||
|
12 HSCO HSC3 12 |
0 — 5 |
||||||||||||||||||||||
|
HSCO Q0.0 |
HSC3 |
I0.1 |
|||||||||||||||||||||
|
HSC3 Q0.1 |
|||||||||||||||||||||||
|
HSC4 |
I0.3 |
I0.4 |
I0.5 |
||||||||||||||||||||
|
HSC5 |
I0.4 |
||||||||||||||||||||||
S7-200CN USS
SINAMICS
G110
S7-224XP CN S7-224XPsi CN
USS
√ 31
√ Micro/Win
|
SM0.1 |
USS_INIT_P1 |
|||||
|
EN |
||||||
|
1 |
Mode |
Done |
Q0.0 |
|||
|
57600 |
Baud |
Error |
VB100 |
|||
|
31 |
Active |
|||||
12
 Loading…
Loading…
You can only view or download manuals with
Sign Up and get 5 for free
Upload your files to the site. You get 1 for each file you add
Get 1 for every time someone downloads your manual
Buy as many as you need