Современные автомобили включают в себя несколько десятков разнообразных датчиков. И все эти датчики регулярно обмениваются информацией с другими датчиками/устройствами автомобиля. Причем автомобили с каждым годом становятся все «умнее» и поэтому количество датчиков в них все больше увеличивается. В автомобилях сегодняшнего дня находят широкое применение системы автономного вождения, системы безопасности с автоматически срабатывающими подушками безопасности, системы контроля давления в шинах, круиз-контроль и т.д. В большинстве случаев информация, поступающая от этих датчиков, является критически важной. Например, если сработает датчик столкновения, которому срочно нужно передать сигнал на раскрытие подушек безопасности, а ему это помешают сделать какие-либо сигналы/процессы в электронной системе автомобиля. В этом случае жизнь людей в автомобиле может оказаться под угрозой. Поэтому в автомобилях не используют такие широко распространенные в обычной электронике протоколы передачи данных как UART, SPI или I2C. Вместо них конструкторы автомобилей отдают предпочтение значительно более надежным протоколам передачи данных, таким как LIN, CAN, FlexRay и т.д.

Наибольшее распространение среди этих «надежных» протоколов получил стандарт (протокол) CAN. Этот стандарт широко применяется не только в электронных системах современных автомобилей, но и во многих других промышленных устройства, в которых критически важна надежная передача данных. Достаточно подробную информацию о стандарте CAN можно прочитать в соответствующей статье Википедии. Мы же в данной статье рассмотрим обмен данными между двумя платами Arduino с помощью протокола CAN.
CAN (Controller Area Network – сеть контролеров) представляет собой протокол (стандарт) последовательной связи, разработанный для промышленных и автомобильных приложений. Это ориентированный на обмен сообщениями протокол, используемый для связи между множеством (несколькими) устройств. Когда различные CAN устройства соединены между собой как показано на следующем рисунке, они формируют сеть, которая работает наподобие центральной нервной системы человека и позволяет любому устройству общаться с любым другим устройством в этой сети.

CAN-сеть состоит из двух проводников (CAN High и CAN Low) и обеспечивает двунаправленную передачу данных. На практике под CAN-сетью обычно подразумевается сеть топологии «шина» с физическим уровнем в виде дифференциальной пары. Передача ведется кадрами, которые могут принимать все узлы сети. Для доступа к такой шине выпускаются специализированные микросхемы (модули) – драйверы CAN-шины.
Обычно скорость передачи по CAN-шине варьируется от 50 Кбит/с до 1 Мбит/с, а дальность связи лежит в диапазоне от 40 метров (на скорости 1 Мбит/с) до 1000 метров (на скорости 50 Кбит/с).
Формат CAN сообщений
В CAN-сети данные передаются в виде сообщений определенного формата. Этот формат состоит из большого числа сегментов, но двумя основными сегментами является идентификатор (identifier) и данные (data), которые и позволяют передавать и принимать сообщения по CAN-шине.
Идентификатор (Identifier) – также известен под именами CAN ID и PGN (Parameter Group Number). Он используется для идентификации CAN устройств в CAN-сети. Длина идентификатора составляет 11 или 29 бит в зависимости от того какой тип протокола CAN используется:
- Standard (стандартный) CAN: 0-2047 (11-bit);
- Extended (расширенный) CAN: 0-229-1 (29-bit).
Data – это данные, которые необходимо передать от одного устройства другому. Длина данных может составлять от 0 до 8 байт.
Data Length Code (DLC) (длина поля данных): может принимать значения от 0 до 8 в зависимости от количества байт для передачи.
Проводники, используемые в CAN
CAN протокол работает по двум проводникам, именуемыми CAN_H и CAN_L, для передачи и приема информации. Оба проводника работают как дифференциальная линия, что означает что CAN сигнал (0 или 1) представляет собой разность потенциалов между CAN_L и CAN_H. Если эта разность положительна и больше определенного минимального уровня напряжения, то это 1, а если эта разность отрицательна – то это 0.
Обычно в протоколе CAN используется кабель с витыми жилами. Как показано на выше приведенном рисунке, на обоих концах CAN-сети включается 120-омный резистор для обеспечения баланса в линии.
Сравнение CAN с SPI и I2C
На нашем сайте мы ранее уже рассматривали использование в платах Arduino протоколов SPI и I2C, поэтому давайте сравним данные протоколы с протоколом CAN.
| Параметр | SPI | I2C | CAN |
| Скорость | 3-10 Мбит/с | стандарт: 100 Кбит/с;
быстрый: 400 Кбит/с; быстрый: 3,4 Мбит/с; |
10 Кбит/с — 1 Мбит/с (зависит от длины используемых проводов) |
| Тип | синхронный | синхронный | асинхронный |
| Число проводов | 3+ (MISO, MOSI, SCK, SS1, SS2…SS(n)) | ||
| Дуплекс | полный дуплекс | полудуплекс | полудуплекс |
По скорости стандарт CAN не в лидерах, но его главным «козырем» является высокая надежность связи.
Применения CAN протокола
- В связи с чрезвычайно высокой надежностью и устойчивостью CAN протокола он широко применяется в автомобилях, промышленных механизмах, сельском хозяйстве, медицинском оборудовании и т.д.
- В связи с небольшим количеством используемых проводников CAN протокол исключительно удобен для применения в автомобилях.
- Устройства на основе CAN протокола отличаются низкой стоимостью.
- В CAN-сеть (шину) легко добавлять и удалять новые устройства.
Использование протокола CAN в Arduino
Поскольку платы Arduino не имеют в своем составе встроенного CAN порта, то для реализации связи между ними по данному протоколу мы будем использовать внешние CAN модули MCP2515. Эти модули подключаются к плате Arduino по интерфейсу SPI.
CAN модуль (контроллер шины CAN) MCP2515
Модуль MCP2515 включает в себя CAN контроллер MCP2515, который представляет собой высокоскоростной CAN приемопередатчик. Соединение модуля MCP2515 с микроконтроллером осуществляется с помощью интерфейса SPI, поэтому его легко подключить ко всем микроконтроллерам с данным интерфейсом.

Начинающим изучение CAN-шины целесообразно начинать именно с этого модуля ввиду его простоты и легкости подключения к большинству современных микроконтроллеров.
Основные технические характеристики модуля MCP2515:
- включает в себя высокоскоростной CAN приемопередатчик TJA1050;
- размеры модуля: 40×28mm;
- управление по интерфейсу SPI с возможностью подключения к CAN-шине нескольких устройств;
- кварцевый генератор на 8 МГц;
- сопротивление на концах 120 Ом;
- включает независимый ключ, светодиодный индикатор, индикатор мощности;
- поддерживает скорости передачи данных до 1 Мбит/с;
- низкий потребляемый ток в режиме ожидания;
- возможность подключения до 112 устройств (узлов).
Назначение контактов (распиновка) CAN модуля MCP2515 представлено в следующей таблице.
| Наименование контакта | Назначение контакта |
| VCC | контакт питания 5 В |
| GND | общий провод (земля) |
| CS | SPI SLAVE select pin (Active low) (выбор ведомого) |
| SO | SPI master input slave output lead |
| SI | SPI master output slave input lead |
| SCLK | контакт синхронизации SPI |
| INT | контакт прерывания MCP2515 |
 CAN модуля MCP2515")
В данном проекте мы будем передавать данные, считываемые с датчика температуры и влажности DHT11 платой Arduino Nano, плате Arduino Uno с помощью CAN модуля MCP2515.
Необходимые компоненты
- Плата Arduino Uno (купить на AliExpress).
- Плата Arduino Nano (купить на AliExpress).
- Датчик температуры и влажности DHT11 (купить на AliExpress).
- ЖК дисплей 16х2 (купить на AliExpress).
- MCP2515 CAN Module (контроллер шины CAN MCP2515) – 2 шт. (купить на AliExpress).
- Потенциометр 10 кОм (купить на AliExpress).
- Макетная плата.
- Соединительные провода.
Схема проекта
Схема проекта для связи между двумя платами Arduino с помощью протокола CAN и модулей MCP2515 представлена на следующем рисунке.

Соединения на передающей стороне:
| Компонент — контакт | Arduino Nano |
| MPC2515 — VCC | +5V |
| MPC2515 — GND | GND |
| MPC2515 — CS | D10 (SPI_SS) |
| MPC2515 — SO | D12 (SPI_MISO) |
| MPC2515 — S I | D11 (SPI_MOSI) |
| MPC2515 — SCK | D13 (SPI_SCK) |
| MPC2515 — INT | D2 |
| DHT11 — VCC | +5V |
| DHT11 — GND | GND |
| DHT11 — OUT | A0 |
Соединения на приемной стороне:
| Компонент — контакт | Arduino Uno |
| MPC2515 — VCC | +5V |
| MPC2515 — GND | GND |
| MPC2515 — CS | 10 (SPI_SS) |
| MPC2515 — SO | 12 (SPI_MISO) |
| MPC2515 — SI | 11 (SPI_MOSI) |
| MPC2515 — SCK | 13 (SPI_SCK) |
| MPC2515 — INT | 2 |
| LCD (ЖК дисплей) — VSS | GND |
| LCD — VDD | +5V |
| LCD — V0 | к среднему контакту потенциометра 10 кОм |
| LCD — RS | 3 |
| LCD — RW | GND |
| LCD — E | 4 |
| LCD — D4 | 5 |
| LCD — D5 | 6 |
| LCD — D6 | 7 |
| LCD — D7 | 8 |
| LCD — A | +5V |
| LCD — K | GND |
Соединения между двумя CAN модулями MCP2515:
H – CAN High
L – CAN Low
| MCP2515 (Arduino Nano) | MCP2515 (Arduino UNO) |
| H | H |
| L | L |
После сборки всей схемы на макетных платах у нас получилась следующая конструкция.

Объяснение программы для Arduino
Первым делом нам необходимо установить библиотеку для работы с протоколом CAN в Arduino IDE. Сначала скачайте ZIP файл библиотеки по следующей ссылке — Arduino CAN MCP2515 Library. Затем установите ее в Arduino IDE с помощью пункта меню Sketch -> Include Library -> Add .ZIP Library.
В нашем проекте мы код программы разделим на две части: для передающей части и для приемной части. Полные коды программ приведены к конце статьи, здесь же мы кратко рассмотрим их основные фрагменты.
Инициализация CAN модуля MCP2515
Для установления соединения платы Arduino с модулем MCP2515 выполните следующую последовательность шагов. Но перед этим убедитесь в том, что указанная выше библиотека CAN MCP2515 установлена в вашу Arduino IDE.
Шаг 1. Установите номер контакта, к которому подключена линия CS интерфейса SPI (10 по умолчанию).
Шаг 2. Установите скорость передачи и частоту кварцевого генератора.
|
mcp2515.setBitrate(CAN_125KBPS, MCP_8MHZ); |
Доступные скорости передачи:
CAN_5KBPS, CAN_10KBPS, CAN_20KBPS, CAN_31K25BPS, CAN_33KBPS, CAN_40KBPS, CAN_50KBPS, CAN_80KBPS, CAN_83K3BPS, CAN_95KBPS, CAN_100KBPS, CAN_125KBPS, CAN_200KBPS, CAN_250KBPS, CAN_500KBPS, CAN_1000KBPS.
Доступные частоты кварцевого генератора:
MCP_20MHZ, MCP_16MHZ, MCP_8MHZ
Шаг 3. Установите режимы.
|
mcp2515.setNormalMode(); mcp2515.setLoopbackMode(); mcp2515.setListenOnlyMode(); |
Объяснение программы для передающей части (Arduino Nano)
В передающей части к плате Arduino Nano подключен CAN модуль MCP2515 по интерфейсу SPI, а данные температуры и влажности, считываемые с датчика DHT11, передаются далее по CAN-шине.
Первым делом в программе подключим необходимые библиотеки: библиотеку SPI для использования интерфейса SPI, библиотеку MCP2515 для использования связи с помощью протокола CAN и библиотеку DHT для работы с датчиком DHT11. Ранее на нашем сайте мы уже рассматривали подключение датчика DHT11 к плате Arduino.
|
#include <SPI.h> #include <mcp2515.h> #include <DHT.h> |
Дадим название контакту, к которому подключен датчик DHT11 – это контакт A0 платы Arduino Nano.
Также определим DHTTYPE как DHT11.
Определим переменную canMsg типа данных структура для хранения сообщений CAN формата.
Установим номер контакта, к которому подключена линия CS интерфейса SPI (10 по умолчанию).
Также создадим объект dht класса DHT с параметрами DHT pin и DHTTYPE.
|
DHT dht(DHTPIN, DHTTYPE); |
В функции void setup():
Инициализируем связь по протоколу SPI.
Начнем считывание данных температуры и влажности с датчика DHT11.
Сбросим в исходное состояние (RESET) модуль MCP2515 с помощью следующей команды:
Установим для модуля MCP2515 скорость передачи 500 кбит/с и частоту кварцевого генератора 8 МГц.
|
mcp2515.setBitrate(CAN_500KBPS,MCP_8MHZ); |
Установим модуль MCP2525 в обычный режим (normal mode).
В функции void loop():
Считаем значения температуры и влажности с датчика DHT11 и сохраним их в переменных целого типа h и t.
|
int h = dht.readHumidity(); int t = dht.readTemperature(); |
Далее установим идентификатору (CAN ID) значение 0x036 (на ваш выбор), DLC (длина поля данных) присвоим значение 8 (8 байт), запишем значения температуры и влажности в поля данных data[0] и data[1], в остальные поля данных запишем значения 0.
|
canMsg.can_id = 0x036; canMsg.can_dlc = 8; canMsg.data[0] = h; //Update humidity value in [0] canMsg.data[1] = t; //Update temperature value in [1] canMsg.data[2] = 0x00; //Rest all with 0 canMsg.data[3] = 0x00; canMsg.data[4] = 0x00; canMsg.data[5] = 0x00; canMsg.data[6] = 0x00; canMsg.data[7] = 0x00; |
После всего этого передадим сообщение по CAN-шине с помощью команды:
|
mcp2515.sendMessage(&canMsg); |
После выполнения этой команды значения температуры и влажности передадутся в виде сообщения по CAN-шине.
Объяснение программы для приемной части (Arduino Uno)
В приемной части нашего проекта к плате Arduino Uno подключены модуль MCP2515 и ЖК дисплей 16х2. Здесь плата Arduino Uno принимает значения температуры и влажности по CAN шине и отображает их на экране ЖК дисплея 16х2.
Первым делом в программе подключим используемые библиотеки: библиотеку SPI для использования интерфейса SPI, библиотеку MCP2515 для использования связи с помощью протокола CAN и библиотеку LiquidCrsytal для работы с ЖК дисплеем 16х2.
|
#include <SPI.h #include <mcp2515.h> #include <LiquidCrystal.h> |
Далее сообщим плате Arduino, к каким ее контактам подключен ЖК дисплей 16х2.
|
const int rs = 3, en = 4, d4 = 5, d5 = 6, d6 = 7, d7 = 8; LiquidCrystal lcd(rs, en, d4, d5, d6, d7); |
Определим переменную canMsg типа данных структура для хранения сообщений CAN формата.
Установим номер контакта, к которому подключена линия CS интерфейса SPI (10 по умолчанию).
В функции void setup ():
Установим ЖК дисплей в режим работы 16×2 и отобразим на его экране приветственное сообщение.
|
lcd.begin(16,2); lcd.setCursor(0,0); lcd.print(«CIRCUIT DIGEST»); lcd.setCursor(0,1); lcd.print(«CAN ARDUINO»); delay(3000); lcd.clear(); |
Инициализируем связь по протоколу SPI.
Сбросим в исходное состояние (RESET) модуль MCP2515 с помощью следующей команды:
Установим для модуля MCP2515 скорость передачи 500 кбит/с и частоту кварцевого генератора 8 МГц.
|
mcp2515.setBitrate(CAN_500KBPS,MCP_8MHZ); |
Установим модуль MCP2525 в обычный режим (normal mode).
В функции void loop():
Следующая команда (с использованием оператора условия If) используется для приема сообщения из CAN-шины.
|
if (mcp2515.readMessage(&canMsg) == MCP2515::ERROR_OK) |
Если записанное условие if выполняется, данные принимаются и сохраняются в переменной canMsg, поле data [0] этой переменной будет содержать значение влажности, а поле data [1] – значение температуры. Мы будем сохранять эти значения в переменных целого типа (integer) x и y.
|
int x = canMsg.data[0]; int y = canMsg.data[1]; |
После успешного приема значений температуры и влажности мы выводим их на экран ЖК дисплея.
|
lcd.setCursor(0,0); lcd.print(«Humidity : «); lcd.print(x); lcd.setCursor(0,1); lcd.print(«Temp : «); lcd.print(y); delay(1000); lcd.clear(); |
Тестирование работы проекта
После того, как аппаратная часть проекта будет готова, загрузите коды программы в платы Arduino в передающей и приемной частях проекта. После этого при подаче питания на схемы вы должны увидеть, как значения температуры и влажности, считанные одной платой Arduino с датчика DHT11, передаются по CAN-шине другой плате Arduino, которая выводит эти принятые значения на экран ЖК дисплея. Мы для проверки правильности значений температуры использовали пульт от кондиционера, с помощью которого устанавливали температуру в комнате.

Исходный код программы (скетча)
Код программы для передающей части (Arduino Nano)
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 |
#include <SPI.h> //Library for using SPI Communication #include <mcp2515.h> //Library for using CAN Communication #include <DHT.h> //Library for using DHT sensor #define DHTPIN A0 #define DHTTYPE DHT11 struct can_frame canMsg; MCP2515 mcp2515(10); DHT dht(DHTPIN, DHTTYPE); //initilize object dht for class DHT with DHT pin with STM32 and DHT type as DHT11 void setup() { while (!Serial); Serial.begin(9600); SPI.begin(); //инициализация связи по протоколу SPI dht.begin(); //начинаем считывать температуру и влажность с датчика DHT11 mcp2515.reset(); mcp2515.setBitrate(CAN_500KBPS,MCP_8MHZ); //устанавливаем скорость шины CAN 500 кбит/с и частоту кварцевого генератора 8 МГц mcp2515.setNormalMode(); } void loop() { int h = dht.readHumidity(); //считываем значение влажности int t = dht.readTemperature(); // считываем значение температуры canMsg.can_id = 0x036; // устанавливаем CAN id в 0x036 canMsg.can_dlc = 8; // длина поля данных CAN = 8 canMsg.data[0] = h; //обновляем значение влажности в поле [0] canMsg.data[1] = t; // обновляем значение температуры в поле [1] canMsg.data[2] = 0x00; //все остальные поля устанавливаем в 0 canMsg.data[3] = 0x00; canMsg.data[4] = 0x00; canMsg.data[5] = 0x00; canMsg.data[6] = 0x00; canMsg.data[7] = 0x00; mcp2515.sendMessage(&canMsg); //передаем CAN сообщение delay(1000); } |
Код программы для приемной части (Arduino Uno)
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 |
#include <SPI.h> //Library for using SPI Communication #include <mcp2515.h> //Library for using CAN Communication #include <LiquidCrystal.h> //Library for using LCD display const int rs = 3, en = 4, d4 = 5, d5 = 6, d6 = 7, d7 = 8; LiquidCrystal lcd(rs, en, d4, d5, d6, d7); //Define LCD display pins RS,E,D4,D5,D6,D7 struct can_frame canMsg; MCP2515 mcp2515(10); // SPI CS Pin 10 void setup() { lcd.begin(16,2); //устанавливаем режим работы ЖК дисплея 16×2 lcd.setCursor(0,0); //показываем приветственное сообщение lcd.print(«CIRCUIT DIGEST»); lcd.setCursor(0,1); lcd.print(«CAN ARDUINO»); delay(3000); lcd.clear(); SPI.begin(); //инициализируем связь по протоколу SPI Serial.begin(9600); //инициализируем последовательную связь со скоростью 9600 бод mcp2515.reset(); mcp2515.setBitrate(CAN_500KBPS,MCP_8MHZ); //устанавливаем скорость шины CAN 500 кбит/с и частоту кварцевого генератора 8 МГц mcp2515.setNormalMode(); //устанавливаем CAN-шину в обычный режим } void loop() { if (mcp2515.readMessage(&canMsg) == MCP2515::ERROR_OK) // To receive data (Poll Read) { int x = canMsg.data[0]; int y = canMsg.data[1]; //показываем принятые значения температуры и влажности на ЖК дисплее 16×2 lcd.setCursor(0,0); lcd.print(«Humidity : «); lcd.print(x); lcd.setCursor(0,1); lcd.print(«Temp : «); lcd.print(y); delay(1000); lcd.clear(); } } |
Видео, демонстрирующее работу проекта
![]() Загрузка…
Загрузка…
28 926 просмотров
OBD (On-Board Diagnostic) обозначает диагностику и контроль основных узлов автотранспортного средства (шасси, двигателя и некоторых вспомогательных устройств). Для проведения самостоятельной проверки систем чаще всего используется диагностический адаптер ELM327 – компактный прибор, который передает данные о работе авто в режиме реального времени. Все что необходимо для использования ЕЛМ – это ПК, работающий на ОС Windows, телефон или планшет на Андройд или iOS. Если говорить о том, как пользоваться ELM327, то справиться с подключением девайса сможет даже начинающий автовладелец.

Однако прежде чем приступить к эксплуатации устройства, необходимо уточнить совместимость сканера для диагностики с вашим автомобилем.
С какими автомобилями совместим сканер
Чтобы определить какой автосканер подходит для личного авто, достаточно определить протоколы обмена данными. Для этого необходимо взглянуть на колодку OBD-2 и уточнить, какие контакты на ней присутствуют:
Наличие контакта 7 (K-Line) говорит о том, что для диагностики используется протокол ISO 9141-2. Такие диагностические разъемы используются в автомобилях азиатского и европейского производства.
Выводы 4, 5, 7, 15 и 16 свидетельствуют о протоколе ISO14230-4KWP2000, который обычно используется на машинах Daewoo, KIA, Hyundai, Subaru STi и на некоторых моделях Mercedes.

Во всех описанных выше случаях можно смело пользоваться сканером ELM327. Кроме этого, он будет беспрепятственно работать с протоколами:
SAE J1850 PWM/VPW;
ISO 15765-4 CAN 29/11 bit 250/500 Kbaud;
SAE J1939.
Как правило, автосканер ELM327 без проблем устанавливается и подключается на любой автомобиль.
Как подключить на Android
Для подключения сканера ELM327 используется специальное гнездо, которое расположено под рулевой колодкой автомобиля (в салоне).
Полезно! Если сканер устанавливается на ВАЗ и прочие отечественные авто до 2006 года выпуска, то, скорее всего, потребуется воспользоваться переходником или адаптером.
Далее, необходимо:
Скачать в Google Play небольшую утилиту Torque. Это приложение считается самым лучшим, так как оно позволяет дополнительно считывать ошибки систем авто.
Подключить ELM327 в соответствующий разъем.
Завести двигатель авто.
Активировать блютуз на мобильном устройстве.
Зайти в настройки смартфона и перейти в «Беспроводные сети Bluetooth».
Нажать на «Поиск нового оборудования».
Дождаться, пока на экране телефона не отобразится список доступных устройств.
Выбрать из них OBD 2 и соединиться с ним. Для этого требуется указать специальный код сопряжения, чаще всего это 1234 или 0000.
Когда подключение ELM 327 bluetooth будет завершено, можно переходить к настройкам. Для этого заходим в Torque и выбираем «OBD 2 настройки адаптера».
Далее, необходимо выбрать устройство Bluetooth, то есть сам сканер ELM 327.
Через некоторое время установится соединение, и можно будет приступать к диагностике систем автомобиля.
Интерфейс программы
Если говорить про ELM 327 interface OBD 2, то он интуитивно понятен. После установки подключения необходимо дождаться, пока мигающая иконка с изображением автомобиля не перестанет моргать. Если все было правильно, то, устройство сразу начнет работать.
Разберемся, как пользоваться автосканером, а точнее, какие из иконок программы Torque нас будут больше всего интересовать:
OBD Check Fault Code – позволяет считать и расшифровать возможные ошибки автомобиля.
Realtime Information – счетчики, отображающие показатели параметров двигателя в реальном времени. Пользователь может самостоятельно выбирать и добавлять счетчики, которые ему нужны. Для этого необходимо нажать «Добавить экран».

Map View – отображает маршрут передвижения.
Во время движения автомобиля водитель может смотреть за показателями датчиков давления, скорости, расхода топлива и многого другого.
Если же вы хотите получать более развернутые данные о системах авто, то рекомендуется подключиться к сканеру ЭЛМ через ПК.
Как подключить на Windows
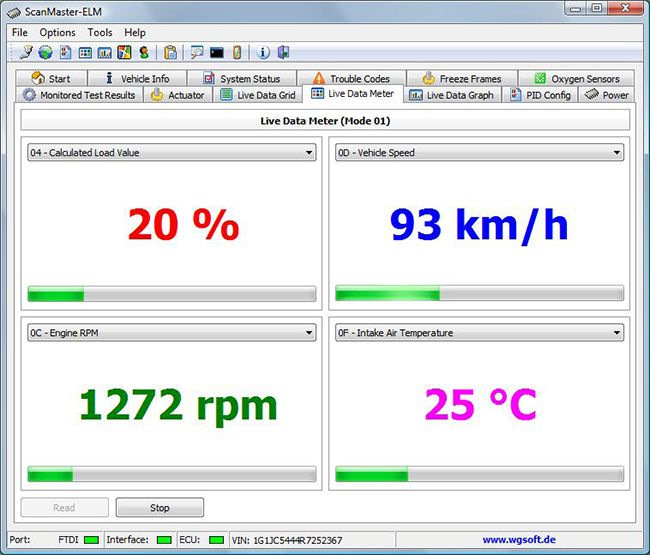
Чтобы разобраться, как подключить сканер к компьютеру необходимо скачать программу ScanMaster.
Полезно! Перед использованием программы, скачанной из сети, ее нужно правильно установить. Для этого, сначала найдите файл с названием «Key» или «Keygen» и сгенерируйте ключ доступа. После этого можно запускать установочный файл с расширением «.exe».
После этого необходимо:
Подключить сканер в разъем в автомобиле.
Завести двигатель машины.
Зайти в панель управления компьютера и перейдите в раздел «Устройства Bluetooth».
Нажать «Добавить устройство» и установить галочку рядом с «Устройство готово к обнаружению» и выбрать «Далее».
Некоторое время будет осуществляться поиск доступных устройств, после чего автосканер подключится к ноутбуку.
Повторно нажать «Далее».
В появившемся окне необходимо вбить один из стандартных кодов: 0000, 1111, 1234 или 6789.
Снова нажать «Далее».
Дождаться автоматической интеграции устройства с ПК и нажать «Готово».
На этом установка ПО для сканера завершена.
Если вы являетесь ярым поклонником яблочной продукции, и вариант подключения к ПК или смартфону Android вас не устраивает, то стоит приобрести специальную модель ELM 327 Wi-Fi, которую можно подключить к любому iOS устройству.
Как подключить к iPhone или iPad
Чтобы заполучить свой собственный диагностический центр для проверки работы автотранспортного средства не обязательно подключаться к сканеру через блютуз. Более современные модели ЕЛМ оснащены Wi-Fi модулем, который позволяет использовать для получения данных практически любое портативное устройство.
Рассмотрим, как установить такое соединение:
Подключить сканер к разъему в авто.
Зайти в раздел, отвечающий за настройки беспроводного соединения и выбрать сеть «CLKDevices».
Справа будет синяя стрелка, на которую необходимо нажать.
В появившемся окне нужно ввести данные адреса IP и маршрутизатора: 192.168.0.11. Также нужно указать стандартную маску подсети: 255.255.255.0.
Чуть ниже необходимо указать порт 35000.
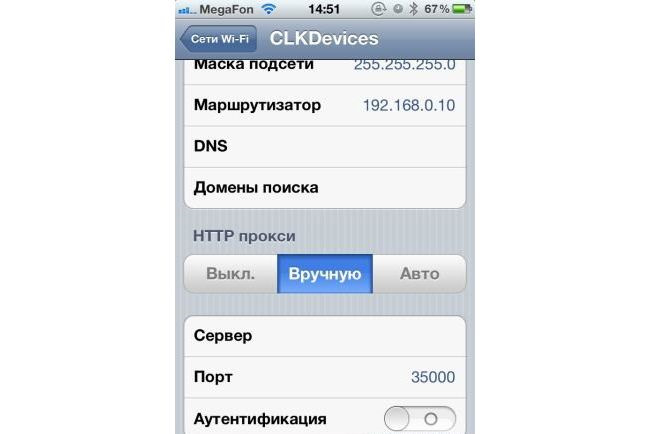
На этом настройка заключена. Зная, как пользоваться сканером ELM 327, достаточно установить любое приложение для быстрой диагностики и прописать в ее настройках те же самые параметры IP и порта.
Однако стоит учитывать, что при настройке частных сканеров могут возникнуть трудности.
Наиболее частые ошибки при подключении
Проблемы, которые могут возникнуть при соединении:
Сканер не подключается к ЭБУ. Такое может случиться по нескольким причинам: прибор не подходит для марки/модели авто, неверно подобран переходник или программа. Иногда водитель забывает пройти инициализацию. Реже подключения не происходит из-за банальной механической поломки – вышел из строя предохранитель, который отвечает за работу разъема OBD II.
ELM327 не показывает данные в реальном времени (например, расход топлива). Дело в том, что данная функция доступна только во время движения автомобиля.
Автосканер не считывает или не сбрасывает ошибки. Часто для активации устройства нужен работающий двигатель, поэтому достаточно просто запустить мотор. Некоторые дешевые модели ELM327 не умеют обнулять ошибки ABS, это решаемо, но требуется модификация прибора.
В заключении
ELM327 – это компактный девайс, который позволит значительно сэкономить на диагностике автомобиля, он прост в использовании и позволяет выводить данные почти на любой ПК или телефон. Тем не менее, перед тем, как самостоятельно подключать автосканер, стоит изучить видео, в котором наглядно показан процесс использования ЕЛМ.
avto-moto-shtuchki.ru/jel…-avtoskanerom-elm327.html
ПРиобрести можно здесь ru.aliexpress.com/item/Ne…042311.0.0.75a633edQKKQsR
ЗА 235 р
ПРОШИВКИ И СОФТ ТОЛЬКО ДЛЯ НАШИХ МАГНИТОЛ. Если вы купили на ALIEXPRESS, мы вам не поможем, заказывайте магнитолы фабричного качества у нас на сайте, цены немного дороже, но качество изготовления и чипов лучше, работаем только с лучшими китайскими производителями Witson, Kaier, Penhui, Zestech.
Заказывая магнитолу у нас вы получите:
- Российскую гарантию 1 год;
- Тех поддержка 24/7, всегда есть прошивки, mcu файлы, системный софт на все магнитолы;
- Запчасти, доп рамки, модули, процессоры для наших магнитол;
- Послегарантийное обслуживание, ремонт;
Инструкции на английском языке от наших поставщиков,видео-обзоры на русском языке и прошивки.
Схема подключения китайской камеры
Схемы распиновки проводов питания
Схема подключения
Стандартная схема подключения универсальной 2din магнитолы, все штатные магнитолы имеют аналогичный набор проводов и штекеров, но в зависимости от марки автомобиля могут отличаться основным кабелем питания и иметь дополнительные провода:
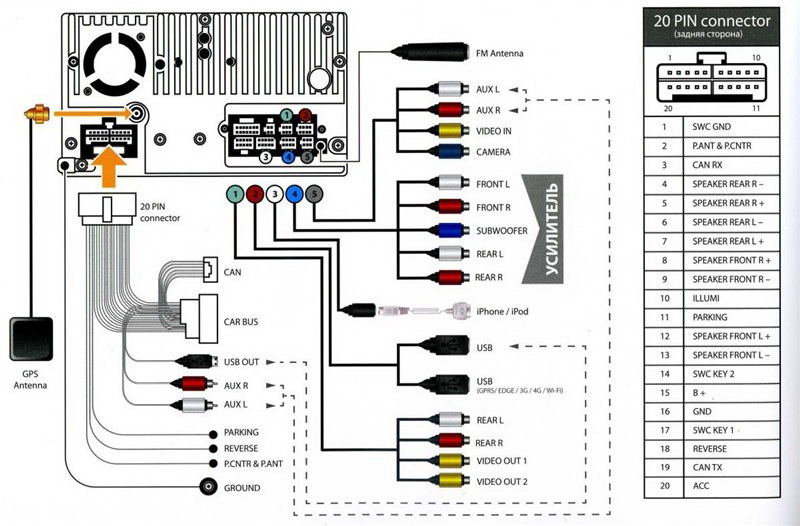
Рраспиновка кабеля питания по цветам:

Для чего нужен CANBUS модуль
Если автомобиль высокой комплектации и имеет штатный усилитель либо штатную навигацию, или есть отображение климат контроля на дисплее и передача бортовых данных на экране оригинальной магнитолы, то нужно заказывать магнитолу с CANBUS модулем, это блок передает данные с бортового компьютера. Отвечает за работу кнопок на руле, управление и отображение климата на экране магнитолы, и работу штатной камеры.
Какие проблемы работы магнитолы в Автомобиле с Canbus модулем:
- После установки магнитолы не работает звук — проблема в основном в магнитолах где есть штатный усилитель — JBL, Harman Kardon, Infinity — необходимо в заводских настройках «Factory Setting» или «О планшете» ввести пароль и найти опцию «Cartype» или «Cantype» по русски «Выбрать автомобиль» и проверить как комплектация автомобиля программно установлена, возможно выбран другой автомобиль либо нужно поставить галочку в доп опции AMP (amplifer — усилитель).
- Не работают кнопки на руле — если в автомобиле есть Canbus, то скорее всего кнопки зависят от этого модуля, необходимо проверить какой выбран тип Cartype по аналогии с усилителем. Бывает другая проблема часть кнопок работает часть нет — нужно поменять провода Key1 Key2 местами.
- Не отображается климат контроль — проблема может быть в том что вообще Canbus нет в комплекте с магнитолой, климат на экране магнитолы отображается в том случае если оригинальная магнитола показывала эти данные, а на китайской магнитоле только по canbus, необходимо в заводских настройках «Factory Setting» или «О планшете» ввести пароль и найти опцию «Cartype» или «Cantype» по русски «Выбрать автомобиль» и проверить как комплектация автомобиля программно установлена.
- Не показывает температуру за бортом — необходимо в заводских настройках «Factory Setting» или «О планшете» ввести пароль и найти опцию «Cartype» или «Cantype» по русски «Выбрать автомобиль» и проверить как комплектация автомобиля программно установлена.
GPS антенна
После установки магнитолы в автомобиль убедитесь что GPS антенна установлена правильно, например на лобовое стекло, проверьте что GPS спутники работают, если же спутники программа не показывает скорее всего сигнал блокируется и нужно поменять расположение антенны.
Какие могут быть проблемы:
Если в течении эксплуатации магнитолы перестали ловить спутники мы рекомендуем проверить GPS модуль и чип. Установите с Play Market приложение GPS TEST, запустите, если показывает ваши координаты и скорость при движении значит модуль работает. В таком случае просто переустановите навигацию.
Если программа GPS тест не показывает скорость и координаты — проблема или в самой GPS антенне или GPS чипе в системе магнитолы. Поменять GPS Антенну не проблема, а чип придется менять электрику.
-
Contents
-
Table of Contents
-
Bookmarks
Quick Links
Hardware Manual
V2
USB-to-CAN
Plugin
USB CAN Interface
Related Manuals for IXXAT USB-to-CAN V2
Summary of Contents for IXXAT USB-to-CAN V2
-
Page 1
Hardware Manual USB-to-CAN Plugin USB CAN Interface… -
Page 2
Fax: +49 (0)7 51 / 5 61 46-29 Internet: www.hms-networks.com Support In case of unsolvable problems with this product or other IXXAT products please contact HMS in written form by: Fax: +49 (0)7 51 / 5 61 46-29 E-mail: support@ixxat.com… -
Page 3: Table Of Contents
Inhalt Introduction ………………5 Installation ………………6 2.1 Softwareinstallation …………..6 2.2 Hardwareinstallation …………… 6 Connectors and displays ………….. 7 3.1 Connectors …………….7 3.1.1 USB connector …………….. 7 3.1.2 Field bus connectors …………..8 3.2 Displays ………………. 9 3.2.1 USB LED …………….10 3.2.2 CAN LED …………….
-
Page 5: Introduction
Introduction 1 Introduction By purchasing the IXXAT USB-to-CAN Plugin interface, you decided for a high-quality electronic component developed and manufactured according to the latest technological standards. In the further description these interfaces are referred as CAN interface. The features of the CAN interfaces are described below.
-
Page 6: Installation
For installation of the VCI V3 driver on Windows computers, please refer to the VCI installation manual. IXXAT also offers the ECI driver for Linux and real-time operating systems for many CAN interfaces. Information on supported operating systems and inter- faces is available on the IXXAT webpage http://www.ixxat.com.
-
Page 7: Connectors And Displays
Connectors and displays 3 Connectors and displays Connectors In Figure 3-1 the position of field bus and USB connectors of the CAN Inter- face with the appropriate pin no. 1 is shown. Figure 3-1: Displays (LED) on bottom side 3.1.1 USB connector The shield (pin 5) of the USB cable is connected to ground (GND) using a 100nF capacitor and therefore also connected to ground of the USB plug.
-
Page 8: Field Bus Connectors
Connectors and displays 3.1.2 Field bus connectors If you are using a not galvanic isolated CAN interface, field bus ground (CAN GND) and USB ground (GND) have the same potential. Using a CAN interface with galvanic isolation, these grounds are separated. Please be care, that in this case the grounds of the field busses (CAN1 / CAN 2 / LIN) have no galvanic isolation among each other.
-
Page 9: Displays
Connectors and displays Displays The CAN interfaces have LED´s that shows the current communication status of USB and fieldbus activities (see Figure 3-2). Figure 3-2: displays (LEDs) on top side Available LEDs on the different CAN interfaces are show in Table 3-3 CAN Interface 1.01.0288.xxxxx LED Pos.
-
Page 10: Usb Led
Connectors and displays 3.2.1 USB LED Light Description Causes / Hints pattern No communication via USB Device not properly initialized, maybe the USB port can´t provide enough power. Device not connected to USB port Device ready for action green USB communication pos- sible…
-
Page 11: Lin Led
Connectors and displays 3.2.4 LIN LED LIN functionality is only available on model 1.01.0288.22043. Light Description Causes / Hints pattern No LIN communication on the LIN bus No LIN Device not connected LIN bus communication With each LIN message the LED is trig- green/gre LIN communication en flash…
-
Page 12: Dimensions
Dimensions 4 Dimensions Figure 4-1 shows the mechanical dimensions of the CAN interface. All dimen- sions in millimeter ± 0.1 if not otherwise noted. Overview Figure 4-1: display (LEDs) on bottom side Recommended fastening elements Using the foreseen mounting holes, fastening elements shown in Table 4-1 are recommended.
-
Page 13: Mounting Options
Dimensions Mounting options The CAN interface can be mounted in two ways therefore different heights are to be considered. 4.3.1 Display (LED) on bottom side Mounting the device in this orientation, the display elements (LEDs) are on the baseboard side and cannot be optimally viewed. Figure 4-3 Figure 4-2 4.3.2 Display (LED) on top side…
-
Page 14: Notes
CAN Busabschluss There is no bus termination resistor for the CAN bus in the CAN interface inte- grated. IXXAT offers a bus termination resistor as a feed through connector as accessory (order number 1.04.0075.03000) Figure 5-1: CAN bus termination resistor 1.04.0075.03000 LIN interface A LIN interface is only available on model 1.01.0288.22043.
-
Page 15: Appendix
Appendix 6 Appendix Technical data USB interface USB 2.0, Hi-Speed (480 MBit/s) Microcontroller / RAM / Flash: 32 Bit / 192 kByte / 512 kByte CAN High Speed , ISO 11898-2 CAN bitrates: 10 kbit/s — 1 Mbit/s CAN transceiver: TI SN65HVD251 CAN bus termination: none…
-
Page 16: Support
Appendix Support For more information on our products, FAQ lists and installation tips, please refer to the support area on our homepage (http://www.ixxat.com). There you will also find information on current product versions and available updates. Returning hardware If it is necessary to return hardware to us, please download the relevant RMA form from our homepage and follow the instructions on this form.
-
Page 17: Information On Emc
EC Declaration of Conformity EMC compliance testing has been conducted to the Electromagnetic Compati- bility Directive 2004/108/EC. For more information please consult the EMC compliance document on the support pages on IXXAT website.. Copyright HMS Technology USB-to-CAN -Plugin Manual, V1.2…