Утвержден
НТ598.00.00.000РЭ-ЛУ
КОМПЛЕКС МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ
Руководство по эксплуатации
НТ598.00.00.000 РЭ
Содержание
1 Введение ……………………………………………….……….………5
2 Описание и работа ..…..…………………………….….………………6
2.1 Описание и работа МРК …………………………..………….…..……6
2.1.1 Назначение МРК….. ……………………………………..…….………6
2.1.2 Состав изделия и комплект поставки ……………………..…….……7
2.1.3 Устройство МРК…. …………………………………………..……….8
2.1.4 Работа МРК…. ………………………………………………….…… 12
2.1.5 Маркировка и пломбирование ………………………………………15
2.1.6 Комплект упаковки и комплект ЗИП………………………………………… 15
2.2 Описание и работа составных частей изделия …………………….. 17
2.2.1 Мобильный робот ……………………………………………..….…. 17
2.2.1.1 Транспортное средство ……………………………………………… 17
2.2.1.2 Манипулятор …………………………………………………………..20
2.2.1.3 Бортовая система дистанционного управления …………………….23
2.2.1.4 Телевизионная система ……………………………………………….25
2.2.1.4.1 Обзорная телевизионная установка ОТУ1………………………….26
2.2.1.4.2 Обзорная телевизионная установка ОТУ2………………………….27
2.2.1.4.3 Телекамера ТК1……….………………………………………………28
2.2.1.4.4 Телекамеры ТК2 и ТК6 ……….………………………………… 29
2.2.1.4.5 Механизм наведения двухстепенной ……………………………….29
2.2.1.4.6 Телекамера ТК3……………………………………………………….30
2.2.1.4.7 Телекамера ТК5……………………………………………………….30
2.2.1.5 Автономный источник питания ……………………….……………31
2.2.2 Пост дистанционного управления ……………………….….………32
2.2.2.1 Пульт управления …………………………………………………….32
2.2.2.2 Стойка с антеннами ………………………………………………….44
2.2.2.3 Автономные источники питания ………………………………………….44
2.2.3 Дополнительное оборудование …………………………………….…… 45
2.2.3.1 Зарядное устройство …………………………………………………….. 45
2.2.3.2 Технологический пульт управления с кабелем …………………………47
2.2.3.3 Комплект сменных губок схвата ……………………………….………..47
2.2.4 Комплект ЗИП одиночный …………………………………………………49
3 Использование по назначению ……………………………………..……50
3.1 Эксплуатационные ограничения …………………………………….….50
3.2 Указания мер безопасности ………………………………………….…..52
3.3 Подготовка МРК к работе ………………………………………………..52
3.3.1 Развертывание МРК………………………………………………………………..52
3.3.2 Объем и последовательность внешнего осмотра …………………………54
3.3.3 Подготовка МР к использованию ………………………………………..54
3.3.4. Подготовка ПУ к использованию ……………………………………… 55
3.3.5 Порядок включения МРК ………………………………………………..56
3.3.5.1 Порядок включения МРК при управлении по кабелю ……………… 57
3.3.5.2 Порядок включения МРК при управлении по радио……………………..58
3.3.6 Проверка на функционирование ……………………………………….59
3.4 Использование МРК….. …………………………………………………61
3.4.1 Типовые режимы работы МРК ……………………………………….….61
3.4.1.1 Управление транспортным средством………………………………….61
3.4.1.2 Управление телевизионной системой …………………………….… 63
3.4.1.3 Погрузочно-разгрузочные работы с помощью манипулятора…………64
3.4.1.4 Транспортирование грузов и проведение специальных работ……….65
3.4.1.5 Проведение разведывательных работ………………………….…………65
3.4.1.6 Работа МРК при управлении по кабелю …….…………………..….… 66
3.4.2 Порядок работы с дополнительным оборудованием…………………. 66
3.4.2.1 Работа с комплектом сменных губок………………………….….….…..66
3.4.2.2 Работа с зарядными устройствами…………………………….….….…..67
3.4.2.3 Работа с технологическим пультом управления…………………..……68
3.4.2.4 Работа с установкой пожаротушения тонкораспыленной водой .……69
3.4.2.5 Работа с модулем водопенного пожаротушения ……………………… 71
3.4.2.6 Работа с модулем порошкового пожаротушения ………………………72
3.4.2.7 Работа с пеногенератором ………………………… ………………………73
3.4.3 Возможные неисправности и способы их устранения……….….….……75
3.4.4 Порядок выключения МРК…………………………………….…………. 76
4 Техническое обслуживание изделия……………………..…….……..…. 77
4.1 Общие указания…………………………………………….…….…..……77
4.2 Меры безопасности……………………………………………..…….……77
4.3 Порядок и виды технического обслуживания МРК….…….….….…….78
4.3.1 Ежедневное техническое обслуживание…………………… ..…………79
4.3.2 Контрольный осмотр…………………………………….……….….……80
4.3.3 Техническое обслуживание при хранении…………………….….…… 80
4.4 Проверка работоспособности МРК………………………….………….. 80
4.5 Консервация (расконсервация, переконсервация )………………….…. 80
4.5.1 Расконсервация……………………………………………………….…… 80
4.5.2 Консервация (переконсервация)…………………………………………..81
4.6 Перечень основных и дублирующих ГСМ, применяемых в изделии… 81
5 Хранение…………………………………………………………………. 82
6 Транспортирование………………………………………………………. 83
7 Гарантийные обязательства……………………………….…………….. 84
ВведениеНастоящее руководство по эксплуатации (РЭ) предназначено для изучения устройства и правил эксплуатации, технического обслуживания, текущего ремонта, хранения и транспортирования мобильного робототехнического комплекса разведки и пожаротушения НТ598.00.00.000 (МРК-РП.00.00.000), соблюдение которых обеспечивает поддержание комплекса в постоянной готовности к действию.
Руководство предназначено для обслуживающего персонала, прошедшего подготовку в специальном учебном центре и имеющего удостоверение на право управления и работы с изделием НТ598.00.00.000 (МРК-РП.00.00.000).
Руководство содержит описание устройства, порядок и правила подготовки изделия к использованию по назначению.
В настоящем РЭ приняты следующие обозначения и сокращения:
АИП – автономный источник питания;
ЗУ – зарядное устройство;
КК – комплект кабельный;
КЛУ – кабельная линия управления;
МН – механизм наведения;
МП – манипулятор;
МР – мобильный робот;
МРК –мобильный робототехнический комплекс;
ОПУ – опорно-поворотное устройство;
ОТУ – обзорная телевизионная установка;
ПДУ – пост дистанционного управления;
ПУ – пульт управления;
СДУ – система дистанционного управления;
ТК – телевизионная камера;
ТС – транспортное средство.
Описание и работа Описание и работа МРК
Назначение МРК
Мобильный робототехнический комплекс разведки и пожаротушения НТ598.00.00.000 (далее МРК), предназначен для применения при ликвидации последствий аварий, отягощенных химическим и радиационным загрязнением, сопряженных с рисками гибели и травматизма личного состава.
Технические характеристики изделияМасса снаряженного МР, не более кг 190
Максимальная скорость передвижения МР, не менее, км/ч 3,0
Высота преодолеваемого МР порогового препятствия, м 0.25
Допустимый угол крена, дифферента МР, не более, градус 35
Глубина преодолеваемой МР водной преграды, не более, м 0.1
Глубина преодолеваемого МР снежного покрова, не более, м 0.1
Номинальная грузоподъемность манипулятора, кг 30
Предельно допустимая грузоподъемность манипулятора, кг 50
Управление МР с ПУ на расстоянии:
по кабелю, м, до
по радио на открытой местности, м, до 200
1000
Габаритные размеры МР, не более, м Длина 1.35
Ширина 0.65
Высота 0.7
Время непрерывной работы, ч, не менее 4
Состав изделия и комплект поставкиВ состав изделия входят механизмы, устройства и приспособления, перечисленные в таблице 1.
Таблица 1
Наименование Обозначение Количество Заводской номер Примечание
1. Мобильный робот МРК-МВТ.10.00.000 1 2. Пульт управления (ПУ) 38-СМ221.02.00.00.00 1 3. Антенна ДУ 1 4. Антенна ТВ 1 5. Штатив 1 6. Комплект кабелей: — кабель питания пульта (1м); 1 — кабель ДУ (1 м); 1 — кабель ДУ (2 м); 1 — кабель ТВ (1 м); 1 — кабель ТВ (2 м); 1 — кабель катушки кабельной (1 м); 1 — кабель «Оружие». 1 7. Клапанный блок НТ598.93.01.000 1 8. Технологический пульт МРК-МВТ.96.00.000 1 9. Кабельная катушка МРК-МВТ.31.00.000 1 10. Комплект сменных
губок схвата:
— удлиненные
— грейферные
— для захвата цилиндрических предметов 2
2
2
11. Блок питания ПУ MP 822 1 12. Зарядное устройство блока питания ПУ Орион PW 320 1 13. Зарядное устройство МР Орион PW 320 2 14. ЗИП 1 15. Комплект эксплутационной документации:
-паспорт НТ598.00.00.00.000ПС
-руководство по эксплуатации
НТ598.00.00.00.000РЭ
-ведомость ЗИП
НТ598.00.00.00.000ЗИ 1
1
1
1 Изделие поставляется заказчику в соответствии с комплектацией, указанной в таблице 2.
Таблица 2
Наименование Обозначение Количество Примечание
1. Мобильный робототехнический комплекс
2. Комплект эксплуатационной
документации (папка):
2.1. Паспорт
2.2. Руководство по эксплуатации
2.3. Ведомость ЗИП НТ598.00.00.000
НТ598.00.00.000 ПС
НТ598.00.00.000 РЭ
НТ598.00.00.000 ЗИ
1
1
1
1
1
В соответствии с таблицей 1
Устройство МРК
Мобильный робототехнический комплекс представляет собой набор механизмов, устройств и приспособлений, предназначенных для выполнения оперативно-тактических задач, указанных в подразделе 2.1.1 настоящего РЭ.
Основным элементом МРК является мобильный робот (МР), общий вид которого представлен на рисунке 1. МР представляет собой транспортное средство (поз. 1), внутри корпуса которого размещены: отсек управления с блоками системы управления, бортовая часть канала связи (закрыт крышкой поз. 2) и система энергообеспечения — отсек аккумуляторный (закрыт крышкой поз. 3). На корпусе транспортного средства монтируется манипулятор (поз. 4) и сменное технологическое оборудование, подключаемое к МР на панелях управления (поз. 5).
МР оснащен телевизионной системой, системой освещения и каналом акустической связи.
Все исполнительные механизмы – электромеханического типа с двигателями постоянного тока.
МР управляется в командном режиме с поста дистанционного управления (рисунок 15).
8
15
14
3
13
11
12
10
9
6
5
7
241
Рисунок 1
Система дистанционного управления предназначена для дистанционного управления исполнительными механизмами и устройствами, входящими в состав МРК. Управление МР осуществляется по радиоканалу или кабелю в зависимости от условий работы.
Конструктивно СДУ делится на пультовую и бортовую части.
Пультовая часть СДУ, расположенная в ПУ, предназначена для задания команд управления, формирования командных посылок и преобразования их в код, удобный для передачи по кабелю и радиолинии. Задание команд управления осуществляется с помощью ручек управления, переключателей и кнопок, расположенных на панели управления (рисунок 19).
Бортовая часть СДУ, расположенная в корпусе транспортного средства МР (рисунок 2), предназначена для приема сигналов управления, поступающих, в зависимости от режима работы, по радиолинии или по кабелю, их обработки, усилению и распределению по соответствующим исполнительным устройствам и механизмам.
4
5 2 1
3
Рисунок 2
Для работы в условиях сложных для прохождения радиоволн (работа в зоне радиотени или работа с постановщиком радиопомех) СДУ снабжена бортовой катушкой с кабелем дистанционного управления, которая устанавливается на стойке в задней части МР (рисунок 12).
Для визуального контроля за работой МР МРК оснащен телевизионной системой (поз. 6, 7, 8, 9 рисунок 1).
Телевизионная система включает в себя:
— две обзорные телеустановки (ОТУ1, ОТУ2), выполняющие функции наблюдения за окружающей обстановкой;
— одну курсовую ТВ-камеру (ТК5), выполняющую функции наблюдения за дорогой в непосредственной близости от мобильного робота и положением гусениц по отношению к проезжей части дороги и их состоянием;
— одну прицельную ТВ-камеру (ТК3), позволяющую вести наблюдение за работой схвата и наведением рабочего инструмента на исследуемые предметы.
Все обзорные ТВ-камеры(ТК1, ТК2, ТК6), входящие в телеустановки ОТУ1 и ОТУ2,– цветные с широкоугольным объективом. Выводят изображение с четкостью не менее 380 ТВ-линий. Одна обзорная камера (ТК1) снабжена трансфокатором, позволяющим производить приближение (увеличение) изображения.
Обзорные ТВ-камеры (ТК1, ТК2, ТК6) установлены на двухстепенные механизмы наведения, позволяющие вести практически круговое наблюдение. Механизмы наведения ОТУ1 и ОТУ2 одинаковые, обеспечивают плавное пропорциональное (в зависимости от угла отклонения джойстика на пульте управления) изменение скорости наведения ТВ-камер – в вертикальной и горизонтальной плоскостях.
Максимальная скорость наведения ТВ-камер (ТК1, ТК2, ТК6) по горизонту и вертикали составляет 10º/с.
Курсовая ТВ-камера (ТК5) – цветная с широкоугольным объективом без трансфокатора, жестко установлена в передней части мобильного робота.
Прицельная ТВ-камера (ТК3)– цветного изображения без трансфокатора, жестко установлена на кисти мобильного робота.
Конструктивно телевизионная система состоит из бортовой, пультовой частей и комплекта антенно-фидерного устройства.
В бортовую часть телевизионной системы (рисунок 1) входят:
— телевизионная камера (поз. 7) (курсовая), установленная на передней части основания ОПУ манипулятора, постоянно ориентированная на переднюю часть гусениц;
— телевизионная камера (поз.  (прицельная), установленная на кисти, постоянно ориентированная на схват;
(прицельная), установленная на кисти, постоянно ориентированная на схват;
— обзорная телевизионная установка ОТУ1 (поз. 9), установленная на вращающейся части опорно-поворотного устройства манипулятора.
— обзорная телевизионная установка ОТУ2 (поз. 6), установленная на вращающейся части опорно-поворотного устройства манипулятора;
— приемник команд управления по радио (общий для системы управления и телевизионной системы);
— блок управления механизмами наведения и телеметрии;
— передатчик телевизионных сигналов;
— антенно-фидерное устройство (для передачи телевизионного сигнала и телеметрии).
В пультовую часть телевизионной системы входят:
— антенно-фидерное устройство;
— передатчик команд управления по радио;
— приемник телевизионных сигналов;
— панель управления;
— формирователь команд управления;
— цветной монитор.
Управление телевизионной системой осуществляется дистанционно с ПУ, а визуальная информация о работе МР отображается на мониторе ПУ.
Дополнительно МР может оснащаться:
— светозвуковой сигнализацией предназначенной для оповещения места нахождения МР;
— приборами радиационной и химической разведки;
— дополнительным технологическим оборудованием и инструментом.
Функциональная схема СДУ МРК представлена на рисунке 3.
Работа МРК
Работу МР и ПУ, рассмотрим по функциональной схеме (рисунок 3).
Управление МР осуществляет оператор с ПУ поста дистанционного управления. Возможно управление, как по кабельной линии связи, так и по радио. Режим управления – командный.
Команды управления задаются оператором на ПУ ПДУ путем нажатия на соответствующие ручки, тумблеры, кнопки и переключатели на панели управления.
Сигналы пропорционального управления поступают в канал управления пульта на аналого-цифровой преобразователь, который преобразует их в цифровой код.
Команды дискретного управления поступают на микропроцессорный модуль пультовой части канала дистанционного управления, который формирует командные посылки в цифровом виде, удобном для передачи по кабельной линии связи и по радио.
В зависимости от режима работы МРК «Радио» или «Кабель» цифровой сигнал управления поступает на радиопередатчик канала дистанционного управления (радиомодем) или в кабельный канал связи соответственно.
В зависимости от режима работы «Радио» или «Кабель» на микропроцессор бортовой части канала дистанционного управления поступают цифровые сигналы управления от радио приемника или с примника-передатчика по витой паре. Сигналы управления, прежде чем поступить на соответствующие объекты управления (двигатели транспортного средства, манипулятор, фары, коммутатор телевизионных сигналов, дополнительное оборудование), поступают на блоки управления по шине CAN, где происходит соответствующее усиление сигналов по напряжению и по току.
Необходимую информацию для выполнения работ оператор получает с помощью телевизионной системы, канала акустической связи и дополнительно устанавливаемых на борту МР датчиков (в комплект МРК не входят). Видеоизображение в виде электрического видеосигнала от пяти телекамер поступает на коммутатор телевизионных сигналов, расположенный в блоке управления телевидением бортовой части СДУ. С коммутатора сигнал от выбранной камеры поступает или на передатчик телевизионных сигналов или на передатчик по витой паре (при работе МРК по кабелю).
Рисунок 3
Движение МР осуществляется моторами-звездочками, приводящими в движение гусеницы. Для повышения проходимости и маневренности предусмотрено изменение геометрии гусеничных обводов транспортного средства. Изменяя направление вращения моторов-звездочек, можно менять направление движения МР.
Погрузочно-разгрузочные работы осуществляются манипулятором, имеющим пять ориентирующих степеней подвижности: вращение относительно вертикальной оси, подъем плеча, качание предплечья и конечного звена, ротация схвата. Каждое движение осуществляется с помощью отдельных электромеханизмов.
Маркировка и пломбированиеНа корпусе МР около панелей управления укреплена табличка, на которой нанесены:
наименование изделия, порядковый номер МР и год изготовления по системе предприятия-изготовителя.
Маркировка ящиков (чемоданов) с комплектами запасных частей, инструментов и принадлежностей (далее – комплектами) выполнена по ГОСТ 14192-96.
На ящиках нанесены манипуляционные знаки по ГОСТ 14192-96, а также номер ящика.
Комплект упаковки и комплект ЗИП
2.1.6.1 Комплект упаковки предназначен для транспортирования и хранения МР, аппаратуры ПДУ эксплуатационной документации, ЗИП и состоит из пяти ящиков (чемоданов), в которых размещены:
ящик 1 – инструмент, пульт технологический, мультиметр, кабели (рисунок 4);
ящик 2 – зарядные устройства, ОТУ1 и ОТУ2 при транспортировании и хранении (рисунок 5).
ящик 3 – сменные губки, катушка кабельная, элементы гусениц (рисунок 6);
ящик 4 – дополнительное оборудование (рисунок 7).
Комплект инструмента уложен в сумку скатку (рисунок 8).
2.1.6.2 Состав комплекта ЗИП представлен в ведомости ЗИП (НТ598.00.00.000ЗИ).
Рисунок 4 Рисунок 5
Рисунок 6 Рисунок 7
Рисунок 8
Описание и работа составных частей МРК
Мобильный роботМР (рисунок 1) представляет собой самоходное, управляемое дистанционно, гусеничное транспортное средство с манипулятором, бортовой частью системы управления и телевизионной системой, оснащаемое дополнительным сменным оборудованием, состав которого меняется в зависимости от выполняемой задачи.
Управление МР осуществляется по кабелю или по радио.
2.2.1.1 Транспортное средствоТранспортное средство с изменяемой геометрией гусеничного обвода (рисунок 9) состоит из корпуса 1, ведущих мотор-звездочек 2, полиуретановых гусениц 3, балансирных тележек 4 и 5 , механизмов натяжения 6, поступательных электромеханизмов 8 типа МП-250Р и направляющих роликов 9.
Мотор- звездочка 2 состоит из корпуса, в котором установлен электродвигатель типа ДБМ120-1-2.5-2 с датчиком положения ротора типа ВТ80 и тахогенератором.. Мотор-звездочка предназначена для создания необходимого вращающего момента, передаваемого на гусеницу и обеспечивающего требуемое тяговое усилие. Передаточное отношение планетарного редуктора мотор-звездочки равно 54. Максимальный момент на мотор-звездочке 160 Н•м.
Гусеница 3 состоит из отдельных армированных полиуретановых элементов, скрепленных между собой с помощью серег и пальцев и предназначена для передачи тягового усилия на грунт и обеспечения движения.
Балансирные тележки состоят из корпуса (поз.5), в который запрессована неподвижная ось (поз.7). На ось насажены два балансира. Балансиры могут совершать качательные движения на осях. Подвеска пружинная, зависимая. Пружина установлена между рычагов балансиров. Для ограничения угла качания балансиров с катками на корпусе установлены резиновые отбойники. С крайних сторон в балансирах на осях установлены алюминиевые катки большего диаметра (поз. 8). С другой стороны установлен балансир с балансирной тележкой с катками меньшего диаметра (поз.10).
Балансирные тележки предназначены для передачи усилий от поверхности движения на корпус МР, они уменьшают динамические нагрузки и гасят колебания корпуса МР.
5 9
368 710142
Рисунок 9
Механизм натяжения (рисунок 10) состоит из фланца (поз.1), закрепленного на корпусе МР. На хвостовую часть фланца насажен на подшипниках скольжения сварной корпус (поз.2), который жестко соединен с наружной цилиндрической частью телескопического корпуса (поз.3). Внутри него расположен ползун, который может перемещаться под действием пружин. Пружины обеспечивают натяжение гусеницы через колесо (ленивец) (поз.4). Направляющий ролик (поз.5), установленный на корпусе МР, задает направление гусеничного обвода при поднятых гусеницах.
Электромеханический поступательный привод МП-250Р (поз. 7) служит для обеспечения изменения геометрии гусеничного обвода посредством изменения положения механизма натяжения относительно корпуса МР.
Корпус МР — сварной из алюминиевого сплава. Все отсеки, кроме кормового, пылевлагонепроницаемые. В корпусе размещены аккумуляторные батареи для энергообеспечения и блоки бортовой части системы управления. На корпусе закреплены элементы ходовой части, манипулятор и навесное технологическое оборудование.
4118910
31275
Рисунок 10
При вращении моторов-звездочек обоих бортов в одном направлении МР совершает прямолинейное движение.
При вращении моторов-звездочек левого и правого бортов в разных направлениях происходит поворот МР на месте. При повороте направо (налево) правая (левая) гусеница движется назад, левая (правая) – вперед.
При прекращении движения МР происходит динамическое торможение электродвигателей моторов-звездочек.
Манипулятор
Манипулятор (рисунок 11) состоит из опорно-поворотного устройства (поз. 1), плеча (поз. 2), предплечья (поз. 3) и кисти (поз. 4).
ОПУ состоит из неподвижного основания и поворотной части. Неподвижное основание имеет фланец для установки манипулятора на корпусе МР. На неподвижной части ОПУ смонтирован привод вращения манипулятора, состоящий из электродвигателя типа ДП-50-60. Соосно с двигателем установлен нормально-замкнутый электромагнитный тормоз с вала которого через цилиндрическую передачу вращающий момент через предохранительную фрикционную муфту передается на планетарный редуктор. С вала планетарного редуктора и через цилиндрическую передачу с люфтовыбирающим механизмом момент передается на полый вал. На валу смонтированы ограничители угла поворота, конструкция которых обеспечивает угол поворота вала на угол около 400. Передаточное отношение редуктора ОПУ равно 1520. Момент на валу ОПУ ограничивается предохранительной муфтой и регулируется степенью сжатия тарельчатой пружины с помощью гаек. Предельный момент на валу ОПУ равен 300 Нм. Максимальная скорость вращения – 16 º/с. Измерение угла поворота вала производится потенциометром типа СП5-21А через мелкомодульную зубчатую передачу с люфтовыбирающим механизмом.
На фланце вала ОПУ установлен блок приводов (поз. 10 рисунок 10). На нем на подшипниках качения смонтировано плечо манипулятора, выполненное в виде двух параллельных щек (поз. 11 рисунок 9) и связанных между собой корпусом-стяжкой (поз. 5 рисунок 11), являющейся опорой для хвостовика электромеханизма качания плеча типа МП-250Р (поз. 8 рисунок 9). Шток механизма шарнирно закреплен на корпусе блока приводов. В плече применено разгрузочное устройство, выполненное в виде двух пружин растяжения (поз. 9 рисунок 10).
В верхней части плеча между двух щек установлено предплечье (поз.3 рисунок 11), шарнирно соединенное с плечом. Привод качания предплечья включает в себя электродвигатель, планетарный редуктор, цилиндрическую и червячную передачи и фрикционную предохранительную муфту, расположенные в корпусе блока приводов. Вращение с вала червячного колеса передается с помощью цепной передачи на трехпоточный цилиндрический редуктор внутреннего зацепления, зубчатое колесо внутреннего зацепления которого размещено в корпусе предплечья. Угол поворота предплечья измеряется потенциометром типа СП5-21А. Общее передаточное отношение привода предплечья равно 6504. Максимальная скорость качания предплечья – 6 º/с.
Привод качания кисти выполнен аналогично приводу качания предплечья. Вращение с вала червячного колеса передается с помощью цепных передач, размещенными
5 6 7
8
9
12 3 4
Рисунок 11
в щеках плеча и предплечья. На валу выходной звездочки установлен потенциометр типа СП5-21А для измерения угла поворота кисти. Общее передаточное отношение привода кисти равно 2787. Максимальная скорость качания кисти – 9 º/с.
Кисть (рисунок 12) состоит из схвата (поз. 3) , механизма ротации (поз. 1) и механизма сжатия-раскрытия губок схвата (поз. 2).
В приводе ротации схвата (поз. 1) применен электродвигатель постоянного тока Д-12ТФ с последовательным возбуждением. В электродвигатель встроена электромагнитная нормально замкнутая тормозная муфта. Передаточный механизм привода ротации схвата содержит четыре планетарных ряда. На выходном валу планетарного редуктора установлено зубчатое колесо с шариковой предохранительной муфтой, которая предохраняет кисть от поломок при воздействии на нее внешних нагрузок. Угол вращения схвата не ограничен. Манипулятор имеет токоподвод для подключения телекамер и исполнительных устройств, устанавливаемых на (в) схвате, а в конструкции кисти установлено вращающееся контактное устройство с восьмью контактными кольцами.
6521
7438 10 9
Рисунок 12
Привод раскрытия губок схвата (поз. 2) состоит из электродвигателя, планетарного редуктора, цилиндрической передачи с предохранительной шариковой муфтой и передачи винт-гайка.
Манипулятор имеет пять ориентирующих степеней подвижности:
— поворот манипулятора вокруг вертикальной оси;
— качание плеча;
— качание предплечья;
— качание кисти;
— ротация схвата.
Качание плеча происходит при выдвижении (втягивании) штока электромеханизма МП-250Р. Развиваемое при этом усилии создает вращающий момент относительно оси качания звена.
Качание предплечья обеспечивается цепной передачей, расположенной в щеке плеча и приводимой в движение электродвигателем через цилиндрическую и червячную передачу, расположенные в блоке приводов.
Качание кисти обеспечивается цепной передачей, расположенной в кронштейне предплечья и цепной передачей, расположенной в щеке плеча и приводимой в движение электродвигателем через цилиндрическую и червячную передачу, расположенные в блоке приводов.
Поворот манипулятора происходит при обкатке шестерен, установленных на валу привода ОПУ, по неподвижному зубчатому колесу.
Ротация схвата происходит при вращении вала электромеханизма, размещенного на корпусе кисти манипулятора.
Раскрытие (закрытие) губок схвата происходит при вращении вала электродвигателя, установленным на корпусе кисти манипулятора.
2.2.1.3 Бортовая система дистанционного управления
Бортовая часть система дистанционного управления обеспечивает управление движением, работой исполнительных механизмов мобильного робота и решение поставленных оперативно-тактических задач на расстоянии – по радиосигналу или по кабелю.
Функционально бортовая часть СДУ состоит из:
— блока управления МР;
— блоков управления транспортным средством;
— бортового блока управления манипулятором;
— передатчика телевизионных сигналов;
— бортовой катушки с кабелем управления;
— комплекта антенно-фидерных устройств.
Дистанционное управление осуществляется с пульта по радиоканалу или по кабельной линии управления.
Дальность работы составляет, м:
— по радиоканалу до 1000;
— по кабелю до 200.
СДУ защищена от влияния непреднамеренных помех промышленного и атмосферного характера, а также помех, вызываемых работой элементов МРК.
Бортовая часть СДУ выполняет следующие задачи:
— прием управляющих команд по радиоканалу и по кабелю;
— передачу ТВ-изображений с телекамер и телеметрии по радиоканалу и по кабелю;
— управление скоростью движения и поворота МР;
— пропорциональное управление двухстепенным устройством наведения ТВ- камер обзора;
— управление пятью приводами МП;
— включение-выключение телевизионных камер;
— пропорциональное регулирование усилия сжатия схвата;
— включение-выключение осветителей;
— включение-выключение светового маяка и звукового сигнала;
— отработку команд по управлению объективом-трансфокатором;
— отработку команд по переходу управления с «Радио» на «Кабель»;
— отработку команд по приведению в действие дополнительного оборудования;
— передачу по каналу телеметрии информации о состоянии боевой цепи срабатывания спецсредств, величине зарядки бортовых аккумуляторов, углах крена и дифферента, данных с приборов разведки;
— выдачу команд приведения в действие систем пожаротушения и охлаждения МР.
Расположение аппаратуры бортовой части системы управления показано на рисунке 2, поз. 2.
В случаях, когда управление по радиоканалу затруднено или невозможно в результате действия внешних электромагнитных возмущающих факторов, используется кабельное управление МР при помощи КЛУ. КЛУ (поз.1, рисунок 13) обеспечивает передачу команд управления с ПУ на борт МР, передачу команд приведения в действие спецсредств и приём ТВ-сигналов с борта МР на ПУ.
КЛУ обеспечивает размещение и свободное наматывание и сматывание кабеля управления длиной до 200 метров.
2
5
4
1
3
Рисунок 13
2.2.1.4 Телевизионная система
Бортовая телевизионная система состоит из двух обзорных телевизионных установок ОТУ 1 (поз. 9, рисунок 1) и ОТУ2 (поз. 6), телекамера ТК3 (поз. и ТК5 (поз. 7).
2.2.1.4.1. Обзорная телевизионная установка ОТУ1
ОТУ1 предназначена для наведения ТВ-камеры на исследуемый объект, преобразования изображения в видеосигнал и передачи его через передатчик видеосигнала на монитор ПУ.
ОТУ1 (рисунок 14) состоит из механизма наведения (поз. 1), на оси которого закреплен кронштейн (поз. 2). На кронштейне с помощью гаек «барашек» закреплена телекамера ТК1 (поз. 3). Кабель телекамеры подключается к разъему на корпусе механизма наведения.
Механизм наведения обеспечивает наведение телекамеры по горизонтальной и вертикальной плоскостям. Сигналы с телекамеры поступают через цепь в корпусе механизма наведения на разъем, расположенный на неподвижном основании.
7
1
6
3
2
5
4
Рисунок 14
Крепление ОТУ1 к кронштейну манипулятора (поз. 5 рисунок 14) обеспечивается через унифицированное посадочное место, выполненное в виде «ласточкина хвоста» (поз.6), и фиксируется винтом (поз. 4).
Обзорная телевизионная установка ОТУ2
ОТУ2 предназначена для наведения ТВ-камер на исследуемый объект, преобразования изображения в видеосигнал и передачи его через передатчик видеосигнала на монитор ПУ ПДУ.
ОТУ2 (рисунок 15) состоит из механизма наведения (поз. 1), на оси которого закреплен кронштейн (поз. 2), к которому в свою очередь крепится еще один кронштейн (поз.3) . На кронштейнах закреплены две телекамеры ТК2 и ТК6 (поз. 4 и 5). Кабельная розетка телекамер подключается к вилке на корпусе механизма наведения.
6
9
8
7
4
3
5
5
1
2
Рисунок 15
Гайки «барашки» позволяют настроить угловое положение телекамеры ТК6 (поз. 5).
Механизм наведения обеспечивает наведение телекамер по горизонтальной и вертикальной плоскостям. Сигналы с телекамер поступают через цепь в корпусе механизма наведения через вилку разъема установленного на неподвижном основании МН на розетку кабеля.
Крепление ОТУ2 к кронштейну манипулятора обеспечивается через унифицированное посадочное место, выполненное в виде «ласточкина хвоста» и фиксируется аналогично как и ОТУ1 винтом.
2.2.1.4.3 Телекамера ТК1
Телекамера предназначена для преобразования изображения в видеосигнал и передачи его через передатчик видеосигнала на монитор ПУ ПДУ.
Основным элементом телекамеры является цветная видеокамера с трансфокатором типа ZBN-21Z23F, которая имеет следующие характеристики:
— матрица ………………………………. 1/4» SUPER HAD CCD;
— горизонтальное разрешение, твл ……………………………………………… 580;
— минимальная освещенность, лк ……………………………. 0.5 (день)/ 0,1 (ночь);
— объектив …………………….23-кратный оптический (и 10-кратный цифровой);
— фокусное расстояние объектива, мм ……………………………………. 3,6 – 97,2;
— электронный затвор , сек ……………………………………………. 1/50-1/10 000;
— отношение сигнал/шум, дБ, более………………………………………………. 50;
— выходной сигнал ………………………………….………………. 1В/75 Ом, PAL;
— напряжение питания, В …………………………………………………………. 12;
— рабочий диапазон температур, ºС ……………………………… минус 10 … +50;
— размеры, мм ………………………………………………………….… 63×62×120;
— вес, г ………………………………………………………………………..…… 300.
В качестве осветителя в телекамере используется галогенная лампа. Управление трансфокатором производится с ПУ ПДУ. Фокусировка изображения осуществляется видеокамерой автоматически. При необходимости, фокусировка может быть осуществлена вручную с ПУ ПДУ.
Конструктивно телекамера состоит из корпуса, внутри которого закреплена видеокамера. С торцов корпус закрывается крышками через прокладки, обеспечивая герметичность телекамеры. Кабель с разъема видеокамеры проходит через патрубок и заканчивается розеткой. На корпусе закреплен козырек (поз. 3 рисунок 14) с фарой (поз. 7 рисунок 14). Фара состоит из галогенной лампы, установленной в корпусе. Контакты галогенной лампы заведены в патрон.
Телекамеры ТК2 и ТК6
Телекамеры предназначены для преобразования изображения в видеосигнал и передачи его через передатчик видеосигнала на монитор ПУ ПДУ.
Конструктивно телекамеры одинаковы и отличаются только схемой распайки выходного разъема.
Основным элементом телекамеры является цветная видеокамера без трансфокатора Корейского производства типа CTW-CH-B3,6, которая имеет следующие характеристики:
— матрица …………………………………… 1/3» SONY SYPER HAD II CCD;
— разрешение по горизонтали, твл …………………………………………. 540;
— чувствительность, лк ……………………………………………………… 0,1;
— фокусное расстояние объектива, мм …………………………………….. 3,6;
— электронный затвор, сек …………………………………….. 1/50-1/100 000;
— отношение сигнал/шум, дБ, не менее …………………………………….. 46;
— выходной сигнал ……………………………………………. 1В/75 Ом, PAL;
— напряжение питания, В …………………………………………………… 12;
— потребляемый ток, мА …………………………………………………… 120;
— рабочий диапазон температур, ºС ………………… от минус 10 до плюс 50;
— размеры, мм ………………………………………………… диаметр 21,5×76;
Телекамера (рисунок 15) состоит из корпуса (поз. 6), внутри которого закреплена видеокамера (поз. 4) и блок светодиодной подсветки (поз. 7). Кабель с видеокамеры и блока светодиодной подсветки проходит через отверстие в корпусе и заканчивается розеткой.
2.2.1.4.5 Механизм наведения двухстепенной
Механизм предназначен для вертикального наведения (ВН) телекамер ТК1 и ТК2 и ТК6 в пределах ±35° и горизонтального наведения (ГН) в пределах 360°.
Механизм наведения (рисунок 15) состоит из блока приводов (поз.1), на который установлен корпус (поз. с зубчато-ременной передачей. На выходной вал (поз. 9) устанавливаются кронштейны, на которых размещены телекамера ТК1 (в составе ОТУ1) или ТК2 (в составе ОТУ2) .
2.2.1.4.6 Телекамера ТК3
Телекамера предназначена для передачи изображения со схвата в систему видеонаблюдения и используется для наблюдения за работой схвата и прицеливания.
Телекамера состоит из корпуса (поз. 5, рисунок 12), внутри которого закреплены видеокамера (поз. 4) и блок светодиодной подсветки (поз. 6). В качестве телевизионной камеры в телекамере ТК7 применена видеокамера цветного изображения типа GF-Q1325H, которая имеет следующие характеристики:
— матрица ………………………………… 1/3» SONY SYPER HAD II CCD;
— разрешение по горизонтали, твл, не менее …………………………… 600;
— чувствительность, лк ……………………………………………………. 0,2;
— фокусное расстояние объектива, мм …………………………………….3,6;
— электронный затвор ………………………………………… 1/50-1/100 000;
— отношение сигнал/шум, дБ, не менее ………………….……………….. 48;
— выходной сигнал ………………………………………….. 1В/75 Ом, PAL;
— напряжение питания, В ……………………………………… 12в (10%);
— потребляемый ток, мА …………………………………………………..80;
— рабочий диапазон температур, ºс ………………от минус 10 до плюс 50;
— размеры, мм ………………………………………………………2525×22;
— вес, г., не более …………………………………………….…..……… 100.
2.2.1.4.7 Телекамера ТК5
Телекамера предназначена для передачи изображения в систему видеонаблюдения и используется для вождения МР и наблюдения за дорогой.
Телекамера конструктивно выполнена аналогично камере ТК3 и состоит из корпуса, внутри которого закреплена видеокамера GF-Q1325H (такая же, как и в ТК3) и блок светодиодной подсветки.
2.2.1.5 Автономный источник питания
В качестве автономного источника питания (АИП-1) для МР применяются два автомобильных аккумулятора напряжением 12 В и емкостью 72 А/ч каждый, расположенные в МР (поз. 1, рисунок 2). АИП-1 предназначены для обеспечения работы ходовых двигателей МР, исполнительных механизмов и электронных блоков бортовой части СДУ, ТВ-системы МР.
АИП-1 обеспечивают непрерывную работу МР в течение 4-х часов.
Примечание. Длительность непрерывной работы зависит от циклограммы выполнения работ МРК. Наиболее энергоемкими являются передвижения МР, особенно с частым маневрированием и движением в гору.
2.2.2 Пост дистанционного управления
В состав аппаратуры ПДУ входят следующие устройства:
— ПУ с монитором;
— комплект антенн;
— штатив для крепления антенн;
— автономный источник питания;
— комплект кабелей.
2.2.2.1 Пульт управления.
Пульт управления предназначен для формирования команд дистанционного управления мобильным роботом, получения телевизионного сигнала от телекамер и отображения телеметрической информации, поступающей с мобильного робота.
Формирование команд осуществляется с помощью органов управления панели пульта.
Управление работой робототехнического комплекса осуществляется по кабелю или по эфиру.
Пульт управления осуществляет управление навесным оборудованием и обрабатывет и отображает сигналы телеметрии от мобильного робота.
Сигналы телеметрии робототехнического комплекса отображаются на дисплее панели управления и имеют как графическое, так и цифровое отображение.
2.2.2.1.1. Состав пульта управления.
Структурная схема пульта управления представлена на рисунке 16.
Панель управления
Панель отображения
Радиомодем
Приёмник/передатчик по кабелю
Монитор
Плата коммутации
Приёмник TV
Преобразователь напряжения DC/DC
Рисунок 16
На дисплей панели управления выводится мнемосхема робототехнического комплекса (рисунок 20) с телеметрическими данными о состояния различных устройств и механизмов робототехнического комплекса и состояние активных органов управления.
Панель управления формирует команды управления:
— определяет режим работы пульта управления – радио или кабель;
— выбирает активное звено (манипулятор) робототехнического комплекса;
— выбирает активную телекамеру робототехнического комплекса;
— осуществляет пропорциональное управление скоростью звеньев робототехнического комплекса и движением;
— формирует дискретные команды управления для навесного оборудования робототехнического комплекса;
— формирует команды управления транспортным средством.
На панели управления индицируются:
— активная телекамера;
— активное звено манипулятора;
— режим работы пульта управления;
— состояние управления устройств робототехнического комплекса;
Радиомодем принимает/передает команды управления и данные телеметрии робототехнического комплекса по эфиру.
Приемник/передатчик по витой паре принимает/передает команды управления, данные телеметрии робототехнического комплекса и телевизионный сигнал по кабелю.
Плата коммутации осуществляет управление режимами работы пульта управления.
Преобразователь напряжения DC/DC – вырабатывает напряжения необходимые для работы пульта управления 5В и 24В.
Конструктивно пульт управления МРК (рисунок 17) выполнен в виде кейса. Габаритные размеры пульта управления – 380х320х230мм. В крышке кейса располагается 12-и дюймовой монитор. На лицевой панели расположены органы управления и 6-и дюймовый дисплей панели управления. Крышка кейса обеспечивает защиту, установленных на панели управления элементов и запирается замками. Сзади крышка крепится к корпусу пульта через петли. Конструкция петель позволяет крышке принимать фиксированное положение при открывании.
С левой боковой стороны корпуса пульта в углублении установлены разъемы для подключения пульта, также закрытые крышкой. Обе крышки крепятся к корпусу при помощи двух невыпадающих винтов с рифлеными головками. Электронные блоки выполнены на печатных платах и установлены внутри корпуса на стойках к панели. Пылебрызгозащита пульта обеспечена лабиринтным уплотнением по периметру крышки и корпуса пульта. Для переноски ПУ и обеспечения работы с ПУ вне стационарных условий на передней боковой стенке корпуса установлена ручка.
3
2
1
Рисунок 17
2.2.2.1.2. Устройство и работа пульта управления.
Перед включением пульта управления в работу необходимо произвести подключение в соответствии со схемой, приведенной на рисунке 18.
Пульт управления МРК-МВТ
Аккумуляторная
батарея 12В
Антенна радиомодема
Приёмник TV сигнала
«РАДИО»
«ВИДЕО»
«ПИТАНИЕ»
«КАБЕЛЬ»
Робототехнический комплекс МРК
Рисунок 18
Подключение пульта производится на панели, расположенной с левой стороны корпуса, где установлены четыре разъема для подключения: кабеля антенны радиоуправления (поз. 1, рисунок 19), кабеля управления (поз. 2), кабеля антенны ТВ (поз. 3) и зарядного устройства (поз. 4).
Примечание: при работе пульта по радиоканалу «кабель» к мобильному роботу не подключать.
Рисунок 19
2.2.2.1.3. Включение пульта управления
В левой верхней части лицевой панели (рисунок 21) расположены специальный переключатель с ключом (поз. 1). Включение ПУ осуществляется путем поворота специального ключа по часовой стрелке. При наличия питания загорается индикация ВКЛ и в течении 1-2 с горят все индикаторы панели управления.
2.2.2.1.4. Выбор режима работы пульта управления.
На панели пульта (рисунок 21) включить тумблер «РАДИО», поз. 32 или «КАБЕЛЬ» поз. 33. При выбранном режиме работы пульта загорается соответствующий индикатор. Повторное нажатие на тумблер режима работ переводит пульт в автономное состояние и индикация режима гаснет. В этом состоянии пульт управления не имеет связи с МР.
При включении питания и завершения загрузки программы на дисплее панели управления появится основное графическое окно пульта управления. Вид основного кадра пульта управления представлен на рисунке 20.
4
3
2
2
1
6
5
Рисунок 20
2.2.2.1.5. Формирование команд управления
Формирование команд управления МР производится органами управления с использованием тумблеров, кнопок и джойстиков.
Панель пульта разбита на функциональные зоны управления:
— режим работы пульта;
— телевидение;
— выбор группы приводов;
— выбор команд;
— выбор меню команд.
Каждая зона управления формирует соответствующие команды управления.
Блокировка всех органов управления пульта производится тумблером – «БЛОКИРОВКА». При активном состоянии режима блокировки пульт не реагирует на органы управления. Повторное нажатие на тумблер «БЛОКИРОВКА» разрешает работу органов управления. Состояние блокировки на панели пульта имеет индикацию активного состояния.
На монитор панели пульта выводится следующая информация в цифровом и графическом виде:
— подсвечивается зелёным цветом на мнемосхеме активное звено манипулятора;
— режим работы пульта управления;
— активная телекамера МР;
— значение заряда аккумуляторных батарей на борту;
— значение отклонения по джойстикам.
— температура вне борта и внутри приборного отсека;
— информация с приборов радиационной и химической разведки;
— показания потенциометров подвижных частей манипулятора ;
— угол крена;
— угол дифферента;
— степень зарядки боевых конденсаторов;
— мониторинг канала приема /передачи.
Панель управления пульта управления представлена на рисунке 21.
Рисунок 21
1 — ключ включения питания пульта управления;
2,4 — тумблеры включения спецсредств;
3 – монитор панели управления;
5 – ключ выбора «спецсредств»;
6,7,11,12 — кнопки выбора дискретных команд управления;
8,9,10,13 — тумблеры выбора номера меню;
14 — регулировка фокуса телекамеры;
15 — выбор признака управления телекамерами;
16 – выбор признака управления приводами;
17 — регулирование масштабом телекамеры;
18 – левый джойстик 2-х координатный с кнопкой;
19,20,24,25 – тумблеры выбора телекамеры;
21,22,23 – выбор активного привода манипулятора;
26 – правый джойстик 2-х координатный с кнопкой;
27 — выбор механизма подъёма/опускания гусениц;
28 – выбор работы управления транспортным средством;
29 – выбор квадратора;
30 – переключение по монитору и инверсия изображения;
31 – блокировка и сброс пульта в исходное состояние;
32 — выбор режима работы пульта по радиоканалу;
33 — выбор режима работы пульта по кабелю.
Взаимосвязь органов управления пульта и команд управления определены в таблице 3.
Таблица 3
№№ Наименование параметра Характеристика
1 СЕРВИС ПУЛЬТА
1.1 ПИТАНИЕ ВКЛ/ВЫКЛ
Включение питания пульта .
1.2 РАДИО
Подключается канал приема/передачи по радио
Тумблер с подхватом вверх – радио. Повторное нажатие в туже сторону канал отключается
1.3 КАБЕЛЬ Подключается канал приема/передачи по кабелю.
Тумблер с подхватом вверх – кабель. Повторное нажатие в туже сторону канал отключается
1.4 БЛОКИРОВКА Канал приема/передачи включен, блокируются органы управления на пульте. Тумблер с подхватом вверх – включено. Повторное нажатие снимает блокировку с органов управления.
1.5 СБРОС Установка настроек пульта по умолчанию:
Режим работы пульта – автономная работа ;
Тумблер «Блокировка» — режим «выключено»;
Тумблер правый «РАБОТА» – режим «выключено»;
Тумблер «РАБОТА»– режим «выключено» М1…М6»;
Тумблер «Подъём гусениц» — режим «выключено»;
Тумблер «Привод наведения ТК»
— режим «выключено»;
Тумблер «Квадратор» — режим «выключено»;
Тумблеры «Выбор меню команд»
— режим «включено» 1-МЕНЮ;
Тумблеры выбор «Телекамеры» — 1-ая телекамера.
№№ Наименование параметра Характеристика
2 От пульта на МР
2.1 Движение робота (вперед – назад, вправо-влево) пропорционально по скорости.
Число градаций скорости ±127. Пропорциональный левый джойстик 2-х координатный с кнопкой
Тумблер левый «РАБОТА» – режим «включено»;
Нажатие кнопки джойстика разрешает управление движением робота. При отпускании кнопки джойстика движение прекращается.
2.2 Подъем /опускание гусениц Пропорциональный левый джойстик 2-х координатный с кнопкой.
Тумблер «Подъём гусениц» – режим «включено»;
Поднятие, опускание гусениц осуществляется с помощью левого джойстика:
для левой гусеницы направление ↑,↓; для
для правой гусеницы направление ←,→.
2.3 Управление манипулятором пропорционально по скорости.
Число градаций скорости ±127. Пропорциональный джойстик 2-х координатный с кнопкой.
Тумблер правый «РАБОТА» – режим «включено».
Тумблерами «ВЫБОР ПРИВОДА» с самовозвратом и с подхватом активируются степени манипулятора (3- тумблера, шесть вариантов выбора приводов).
2.4 ВЫБОР ПРИВОДА
Панель «ВЫБОР ГРУППЫ ПРИВОДОВ» Тумблеры с самовозвратом и с подхватом:
Положение 1 – резерв;
Положение 2 — Левый джойстик управление движением робота; Правый джойстик управление М3 (↑↓) (качание предплечья) + М4 (←→) (качание кисти) ;
Положение 3 — Левый джойстик управление движением робота; Правый джойстик управление
М5 (←→ ) (ротация кисти) – (↑↓) (Сжатие схвата).
Положение 4 – резерв;
Положение 5 – резерв;
Положение 6 — Левый джойстик управление движением робота. Правый джойстик управление М1(←→) (ротация манипулятора) + М2(↑↓) (качание плеча)
2.5 Управление телевидением
Пропорциональный правый джойстик 2-х координатный с кнопкой.
Тумблер «ПРИВОД НАВЕДЕНИЯ ТК» — режим «включено»;
Тумблерами панели «ТЕЛЕВИДЕНИЕ» с самовозвратом и с подхватом активируются телекамеры (4 тумблера, восемь вариантов выбора телекамер).
№№ Наименование параметра Характеристика
2.6 Выбор телекамер.
Панель «ТЕЛЕВИДЕНИЕ» Положение 1 — ТК-1
Положение 2 — ТК-2
Положение 3 — ТК-3
Положение 4 — ТК-4
Положение 5 — ТК-5
Положение 6 — ТК-6
Положение 7 — ТК-7
Положение 8 — ТК-8
2.7 Управление двух координатным механизмом наведения телекамер
Число градаций скорости ±127. Правый пропорциональный джойстик 2-х координатный.
Тумблер «ПРИВОД НАВЕДЕНИЯ ТК»- режим «включено»;
Правый джойстик — ↑,↓- подъём/опускание;
←,→ — вращение
2.8 Команда «ФОКУС ± » Тумблер «ФОКУС»-↑,↓
2.9 Команда «ZOOM ± » Тумблер «ZOOM »-↑↓
2.10 Команда «КВАДРАТОР» — Тумблер «» вверх – включение режима «квадратор». Повторное нажатие отключает режим «квадратора» (в данной поставке не реализован).
2.11 Команда «ПЕРЕМЕЩЕНИЕ» Тумблер «» ↑, — перемещение дополнительного окна по экрану монитора (в данной поставке не реализован).
2.12 Команда «ИНВЕРСИЯ» Тумблер «» ↓, — основное и дополнительное окно на мониторе меняются местоположением. Повторное нажатие возвращает в исходное состояние (в данной поставке не реализован).
2.13 Команды «СПЕЦСРЕДСТВА»
Ключ в положении:
С1- оружие1;
С2- оружие2;
С1+С2- оружие1+2;
СБРОС- сброс оружия.
Выстрел — одновременное нажатие двух тумблеров ПУСК.
Команды дискретного управления формируются с помощью 4-х тумблеров на панели «ВЫБОР МЕНЮ КОМАНД» и 4-х кнопок на панели «ВЫБОР КОМАНД» (рисунок 22).
Выбор конкретной команды пункта меню производится нажатием кнопки «ВЫБОР КОМАНД» (рисунок 23). При нажатии кнопки (поз.1) фон команды «Фара» на дисплее панели управления становится зеленым. Это состояние соответствует активации выбранной дискретной команды управления. Повторное нажатие на кнопку сбрасывает дискретную команду управления. При нажатии кнопок (поз. 2, 3, 4) соответственно изменяется фон команд «ЛЦУ», «Маяк» и «Сирена» на дисплее панели управления.
Рисунок 22
1
4
3
2
Рисунок 23
Выбор меню производится переводом тумблера, расположенного на панели «ВЫБОР МЕНЮ КОМАНД» в одно из 6-и положений. На панели « МЕНЮ НАСТРОЕК» выбирается одно из 2-х положений.
Таблицы дискретных команд
МЕНЮ 1 (по умолчанию)
№ Наименование Примечание
1 «Фара» Вкл/Выкл фары телекамеры на борту МР
2 «ЛЦУ Вкл/Выкл лазерного целеуказателя на борту МР (в МРК-РП не используется)
3 «Маяк» Вкл/Выкл маяка на борту МР
4 «Сирена» Вкл/Выкл сирены на борту МР
МЕНЮ 2
№ Наименование Примечание
1 Резерв
2 Резерв
3 Резерв
4 «Орошение» Вкл/Выкл режима орошения МР.
МЕНЮ 3
№ Наименование Примечание
1 «Подача воды» Вкл/Выкл подачи воды
2 Резерв
3 «Компактная струя» Вкл/Выкл изменение струи
4 Резерв
МЕНЮ 4
№ Наименование Примечание
1 «12В ДК1» Вкл/Выкл оборудования 12В ДК1 на борту МР.
2 «12В ДК2» Вкл/Выкл оборудования 12В ДК2 на борту МР.
3 «24В ДК1» Вкл/Выкл оборудования 24В ДК1 на борту МР.
4 «24В ДК2» Вкл/Выкл оборудования 24В ДК2 на борту МР.
МЕНЮ 5
№ Наименование Примечание
1 «Диагностика 1» Вкл/Выкл режима диагностики 1 на борту МР (проверка дозиметра)
2 «Диагностика 2» Резерв
3 «Рабочее ПМ» Перевод манипулятора в рабочее положение
4 «Транспортное ПМ» Перевод манипулятора в транспортное положение
МЕНЮ 6 (резервные команды управления)
МЕНЮ А
№ Наименование Примечание
1 «Штатный режим» Монитор панели работает в штатном режиме (режим по умолчанию)
2 «Габариты» На мониторе панели пульта отображается в графическом виде и цифровом виде информация о положении звеньев манипулятора;
3 «Телекамера» Переводит телевизионный дисплей пульта в режим настройки параметров телекамеры.
Изменение параметров телекамеры производится тумблерами «ФОКУС» и «ZOOM».
4 «Статус» На мониторе панели управления выводится окно с информацией о состоянии МР.
МЕНЮ В
№ Наименование Примечание
1 Резерв
2 Резерв
3 Резерв
4 Резерв
2.2.2.2. Стойка с антеннами
Передача радиосигнала управления с ПУ и прием ТВ-сигнала телевизионной системы МР осуществляется с помощью антенн, устанавливаемых на штативе. Антенны подсоединяются к пульту кабелями.
2.2.2.3. Автономные источники питания
В качестве автономного источника питания ПУ используется источник питания типа mobilEn MP822, напряжением 12 В, емкостью 22 А/ч.
Для более длительной работы ПУ подключается сетевое ~220В зарядное устройство к mobilEn MP822.
2.2.3 Дополнительное оборудование
2.2.3.1 Зарядное устройство
Зарядные устройства (ЗУ) предназначены для зарядки аккумуляторов автономных источников питания МР и ПУ от сети переменного тока напряжением 220 В, 50 Гц, а также для ускоренной зарядки за время, в два раза меньшее номинального времени заряда (5-6 часов).
Зарядное устройство состоит из 3-х отдельных зарядных устройств (рисунок 24) двух типов.
Для зарядки аккумуляторов МР в МРК используются два зарядных устройства “Орион PW320” или “Орион PW325”, объединенные в один блок и имеющие один общий выходной разъем для подключения к разъему для зарядки МР. Для зарядки автономного источника питания ПУ используется зарядное устройство “Орион PW260” или “Орион PW265”, ГОСТ Р МЭК 60335-2-29-98, ГОСТ Р 51318.14-99, ГОСТ Р 51527-99 имеющий выходной разъем (поз. 7) для подключения к разъему «Питание» автономного источника питания ПУ.
Зарядные устройства обеспечивают зарядку автономных источников питания МРК от сети переменного тока напряжением 220 В, 50 Гц. Выходные параметры ЗУ обеспечивают зарядку аккумуляторных батарей в номинальном и ускоренном режимах. При достижении полной зарядки, ЗУ автоматически отключается. Контроль за процессом зарядки аккумуляторов осуществляется по светодиодному линейному индикатору или стрелочному прибору в зависимости ото марки ЗУ.
Зарядные устройства также используется, как источник питания при продолжительном использовании МРК (при одновременном подключении аккумуляторных батарей).
Характеристики ЗУ “ Орион 260” и “Орион PW265”:
— напряжение питающей сети, В……………………………………..180-240;
— диапазон плавной регулировки выходного тока, А..…………не менее 0,4 – 6;
— выходное напряжение в режиме стабилизации тока (равно напряжению
на клеммах аккумуляторной батареи), В…………………..от 0 до 14,6;
— выходное напряжение в режиме стабилизации напряжения
(при токе потребления меньшем, чем ток, заданный
регулятором), В…………………………………………………14,6-14,8;
— габаритные размеры ЗУ, мм…………………………….………..155x85x200;
— масса ЗУ, кг……………………………………………………….……0,85.
Характеристики ЗУ “ Орион 320” и “ Орион 325”:
— напряжение питающей сети, В……………………………………..180-240;
— диапазон плавной регулировки выходного тока, А..…………не менее 0,4 – 15;
— выходное напряжение в режиме стабилизации тока (равно напряжению
на клеммах аккумуляторной батареи), В…………………..от 0 до 14,6;
— выходное напряжение в режиме стабилизации напряжения
(при токе потребления меньшем, чем ток, заданный
регулятором), В…………………………………………………14,6-14,8;
— габаритные размеры ЗУ, мм…………………………….………..155x85x200;
— масса ЗУ, кг……………………………………………………….……0,91.
ЗУ функционируют в интервале температур от минус 10° до плюс 40°С.
Зарядные устройства снабжены комплектом кабелей для зарядки аккумуляторов в составе МРК через разъемы для зарядки, установленные на корпусах МР и автономного источника питания ПУ.
1
5
4
3
1
2
4
3
2
8
6
9
8
7
6
Рисунок 24
2.2.3.2 Технологический пульт управления с кабелем
Технологический пульт управления предназначен для управления движениями МР и манипулятора при техническом обслуживании и при погрузке МР для транспортировки.
Конструктивно технологический пульт управления (рисунок 25) состоит из корпуса (поз. 1), являющегося лицевой панелью и кабеля (поз. 2) со штепсельным разъемом (поз. 3). На лицевой панели расположены кнопки выбора привода (поз. 5) и джойстик управления (поз. 4). Для проведения работ с мобильным роботом пульт подключается посредством кабеля к разъему «Пульт» (поз. 1, рисунок 28) на приборной панели МР.
4
5
3
2
1
Рисунок 25
2.2.3.3 Комплект сменных губок схвата
Комплект сменных губок схвата предназначен для обеспечения надежного захвата предметов различной формы и размеров.
Комплект сменных губок схвата (рисунок 26) состоит из:
а) плоских прямых губок (поз. 7, рисунок 11), установленных штатно на кисти манипулятора для захвата рабочего оборудования и плоских предметов;
б) узких удлиненных губок (поз. 2) для захвата мелких предметов, расположенных в щелях шириной 20 мм и более, глубиной до 200 мм и отверстиях диаметром 40 мм и более;
в) губок типа грейфер (поз. 1) с диаметром внутренней полости 160 мм;
г) губок для захвата цилиндрических предметов (поз. 3) диаметром от 50 до 200 ммОсновой комплекта являются губки схвата прямые с колодкой (поз. 7, рисунок 12), которые состоят из колодки (поз. с фиксатором и прямых губок (поз. 7). Первоначальное раскрытие губок в схвате может быть изменено в зависимости от того, в каком положении будут зафиксированы губки схвата. Для этого губки схвата имеют несколько фиксирующих отверстий (поз.5 рисунок 26) на сопрягаемых поверхностях. Все губки комплекта имеют унифицированное посадочное место, выполненное в виде «ласточкина хвоста». Выбранный комплект губок вставляется в посадочное место и фиксируется в выбранном положении
.
3
2
1
5
4
Рисунок 26
2.2.4. Комплект ЗИП одиночный
Комплект ЗИП для МРК включает в себя набор ключей, отверток и другие принадлежности и инструмент, перечисленные в подразделе 2.1.6 настоящего РЭ и представленные на рисунках 4, 5, 6 и 8.
Использование по назначению
Эксплуатационные ограничения.
При эксплуатации МРК следует учитывать ряд ограничений, несоблюдение которых недопустимо по условиям безопасности и может привести к выходу МРК из строя.
При движении назад не допускается наезд на кабель (при управлении по кабелю).
Не допускается разворачивать МР с минимальным радиусом поворота ( на месте) на крутых косогорах, в ямах, рвах, на песчанных и гравийных поверхностях и т.п. во избежание спадания гусениц и повреждения МР. Поворотов в этих случаях рекомендуется выполнять чередуя поворот на небольшой угол с прямолинейным движение вперед-назад.
Если высота препятствия выше допустимой по техническим характеристикам или заранее неизвестна, его следует объехать. При работе с грузом движения через пороговые или другие виды препятствий следует избегать.
Если глубина водной преграды заранее не известна, ее следует объехать.
При движении МР по местности, заваленной различными предметами (камнями, обломками и т.п.), избегать попадания крупных (свыше 7-9 см в поперечнике) предметов под корпус во избежание зависания МР.
Не допускается использовать манипулятор для перемещения грузов без отрыва от поверхности рабочей площадки.
МРК предназначен для эксплуатации в районах с умеренным климатом.
Климатически защищенные устройства изделия – мобильный робот, сменные технологические модули и катушка с кабельной линией управления – рассчитаны на эксплуатацию при температуре окружающей среды от минус 40 до плюс 40°С и относительной влажности воздуха не более 98% при температуре плюс 25°С.
В зимнее время, при отрицательных температурах, избегайте нахождения МР в нерабочем состоянии на открытом воздухе. Рабочее состояние МР (особенно подвижные кабельные части и телекамеры) поддерживается за счет собственного выделения тепла и, в этом случае, выдерживают температуру до минус 40°С.
Пульт управления рассчитан на эксплуатацию при температуре окружающей среды от 0 до плюс 40°С и относительной влажности воздуха не более 98% при температуре плюс 25°С.
Зарядное устройство рассчитано на эксплуатацию при температуре окружающей среды от минус 10 до плюс 40°С и относительной влажности воздуха не более 90% при температуре плюс 20°С.
После хранения изделия в холодном помещении или после перевозки в зимних условиях перед использованием необходимо дать ПУ и ЗУ прогреться при температуре не ниже плюс 10°С в течение двух часов.
После завершения работ не допускается оставлять включенным питание МР и ПУ.
Не оставлять соединенными разъёмы зарядного устройства с МР и ПУ, при выключенном питании зарядного устройства – во избежание разрядки автономных источников питания.
Запрещается использовать изделие при снятой крышке МР и при снятых кожухах или корпусных деталях, которые защищают привода и механизмы изделия от попадания влаги и пыли.
Не прикладывать внешние воздействия к звеньям манипулятора, к кронштейнам крепления ОТУ, т.к. это может привести к поломке элементов конструкции.
Необходимо избегать воздействия ударных нагрузок на ПУ, ЗУ, штатив с антеннами – во избежание их поломок.
После использования изделия по назначению проверить наличие влаги в корпусе МР. При наличии влаги необходимо ее удалить и просушить МР в теплом помещении со снятыми крышками контрольных панелей и приборного отсека. При длительном хранении, особенно при наличии перепада температур хранение проводить при приоткрытых крышках приборного и аккумуляторного отсека МР.
Внимание! При эксплуатации осторожно обращаться с монитором ПУ, так как экран монитора выполнен из стекла. Опускание крышки ПУ производить осторожно, придерживая крышку рукой. Перед опусканием крышки проверить отсутствие посторонних предметов на лицевой панели ПУ.
Не допускается прикасаться руками или другими предметами к элементам оптики и экранам мониторов. Элементы оптики и экраны мониторы протирать только чистой, мягкой тканью (фланелью), смоченной в спирте.
Внимание! При зарядке аккумуляторов возможно образование взрывоопасной смеси. Зарядку проводить в хорошо проветриваемом помещении. Зарядку аккумуляторов МР проводить только при снятой крышке аккумуляторного отсека.
Внимание! Прежде чем использовать изделие, нужно внимательно ознакомиться с настоящим руководством по эксплуатации, с расположением элементов управления, розеток внешних соединений и надписями на корпусе МР, манипулятора и других составных частей.
Указание мер безопасности
К работе с МРК допускаются только обслуживающий персонал, прошедший подготовку в специальном учебном центре и имеющий удостоверение на право управления и работы с МРК и прошедший инструктаж по технике безопасности.
В целях надежной работы изделия и безопасности обслуживающего персонала необходимо соблюдать общие правила техники безопасности, установленные на месте эксплуатации изделия.
Применять изделие допускается только в соответствии с назначением, указанным в настоящем РЭ.
При работе с использованием дополнительного оборудования не входящего в состав МРК необходимо соблюдать требования безопасности, изложенные в руководствах по их эксплуатации на это оборудование.
Необходимо соблюдать осторожность при работе с зарядным устройством, входящим с состав изделия, так как используется входное напряжение ~ 220 В с частотой 50 Гц. Во избежание несчастных случаев требуется соблюдение общих мер безопасности от поражения обслуживающего персонала электрическим током.
Запрещается применять в зарядном устройстве предохранители изготовленные из проводников диаметром больше допустимого для каждого типа ЗУ. Перед заменой предохранителя в ЗУ не забудьте вынуть вилку из розетки электросети.
Во время зарядки АИП запрещается производить ремонтные и профилактические работы, а также проверять работоспособность изделия.
При проверке функционирования МРК запрещается находиться ближе двух метров к МР, проверять качество стыковки соединителей при включенных приводах.
Изделие не представляет опасности для жизни и здоровья человека и окружающей среды при соблюдении правил эксплуатации, хранения и транспортирования, изложенных в настоящем РЭ.
Подготовка МРК к работе
3.3.1 Развертывание МРК
3.3.1.1 МРК транспортируется к месту выполнения работ в автомобиле-фургоне.
3.3.1.2 Порядок расстопорения МР
Ослабить талрепы съемных растяжек. Снять талрепы.
3.3.1.3 Для выгрузки МР подключить технологический пульт посредством кабеля к разъему «Пульт» (поз.1) на лицевой панели МР (рисунок 27).
Включить МР, для чего установить на панели управления МР тумблер «Питание» (поз. 2) в верхнее положение.
Выбором соответствующих приводов опустить гусеницы в нижнее положение, что обеспечивает максимальную устойчивость при движении под уклон.
Произвести выгрузку МР по установленным аппарелям (трапу), используя ручку управления на технологическом пульте управления.
1 10 11 12 1373 89465 2
Рисунок 27
Установить элементы телевизионной системы: обзорные телеустановки ОТУ 1и ОТУ 2 (поз.6, и 9, рисунок 1) на манипуляторе.
3.3.2. Объем и последовательность внешнего осмотра
3.3.2.1. Внешний осмотр МР производить после его выгрузки из автомобиля.
3.3.2.2. При внешнем осмотре МРК:
а) убедиться в комплектности МРК
б) убедиться в целостности соединяющих кабелей.
в) убедиться в отсутствии ослабления крепежа и механических повреждений, способных помешать нормальной работе МРК;
г) проверить целостность и чистоту защитных стекол фар и камер, надежность стыковки соединителей на кабелях.
3.3.2.3. Описание положения органов управления и контроля МРК перед включением (рисунок 21) .
Перед включением органы управления и контроля на ПУ должны находиться в следующих положениях:
— ручки управления манипулятором и транспортным средством должны находиться в нейтральном положении (вертикально);
— переключатель (ключ) «СПЕЦСРЕДСТВА» (поз. 5) в положении «Выкл»;
— положение переключателей, тумблеров и кнопок не контролировать.
3.3.3. Подготовка МР к использованию
Извлечь два аккумулятора АИП МР из штатной упаковки, если они не были установлены в МР ранее.
Установить МР на ровную поверхность.
Проверить степень зарядки аккумуляторов. Напряжение каждого из аккумуляторов должно быть не менее 12,8 В. Замер напряжения производить любым мультиметром, имеющим класс точности не менее 0,5.
Развернуть манипулятор вручную(плавным прикладыванием усилия к плечу манипулятора протии часовой стрелки), освободив доступ к аккумуляторному отсеку. Отвернуть винты и снять крышку с аккумуляторного отсека (поз. 3, рисунок 1) МР. Установить аккумуляторы (поз. 1 рисунок 2) в аккумуляторный отсек.
Проконтролировать положение тумблера «Питание» (поз. 2, рисунок 27), который должен находиться в выключенном положении.
Подсоединить клеммы питания МР к аккумуляторам.
Внимакние! Рекомендуется перед установкой (снятием) аккумуляторов извлечь из МР блоки управления (поз. 2 и 5, рисунок 2).
Проверить правильность подсоединения питания к аккумуляторам, для чего перевести тумблер «Питание» (поз. 2, рисунок 27) в положение ВКЛ. При этом если аккумуляторы заряжены полностью должны загореться индикаторы (поз. 3), если аккумуляторы заряжены не полностью необходимости дозарядить аккумуляторы штатным зарядным устройством. Порядок зарядки аккумуляторов МР изложен в п. 3.4.2.2 настоящего РЭ.
Тумблер «Питание» перевести в нижнее положение.
Установить антенну ДУ (поз. 4, рисунок 2).
Установить стойку в сборе и телевизионную антенну (поз.10, рисунок 1).
Установить ОТУ1 и ОТУ2.
Перевести тумблер «Питание» на панели управления МР в положение ВКЛ.
МР включен и готов к работе.
3.3.4. Подготовка ПУ к использованию
При управлении МР по радиоканалу:
— извлечь штатив, кабели и антенны;
— установить на штативе антенну дистанционного управления и антенну приема телевизионного сигнала;
— подключить кабели к разъемам ПУ (см. рисунок 19).
При управлении МР по кабелю:
— установить КЛУ на стойку и закрепить хомутом (поз. 12, рисунок 1) при помощи откидного болта (поз. 5);
— подключить разъем КЛУ (поз. 1, рисунок 28) к разъему «Кабель» коммутационной коробки поз. 2 стойки МР
1
2
Рисунок 28
— подключить кабель КЛУ к разъемам ПУ (рисунок 19).
Открыв замки откинуть крышку ПУ до момента, пока крепящие петли четко не зафиксируют ее положение.
Перед включением органы управления и контроля на ПУ должны находиться в следующих положениях:
— ручки управления манипулятором и транспортным средством должны находиться в нейтральном положении (вертикально);
— переключатель (ключ) «СПЕЦСРЕДСТВА» (поз. 5) в положении «Выкл»;
— положение переключателей, тумблеров и кнопок не контролировать.
3.3.5. Порядок включения МРК
Внимание! При каждом включении контролировать положение переключателя «СПЕЦСРЕДСТВА», который должен находиться в положении «ВЫКЛ».
Запрещается производить любые перестыковки кабелей при включенных МР и ПУ.
3.3.5.1. Порядок включения МРК при управлении по кабелю
Включение МРК осуществляется в следующем порядке:
— повернуть ключ (нажать кнопку) « ПИТАНИЕ» (поз. 1, рисунок 21) на ПУ ;
— на панели пульта включить тумблер «КАБЕЛЬ» (поз. 33 рисунок 21);
При выбранном режиме работы пульта загорается соответствующий индикатор. Повторное нажатие на тумблер режима работ переводит пульт в автономное состояние и индикация режима гаснет. В этом состоянии пульт управления не имеет связи с МР.
При включении питания и загрузки программы на мониторе панели управления ПУ появится графическое окно. Вид основного кадра на мониторе пульта управления представлен на рисунке 20.
Индикатор питания на блоке питания ПУ должен показывать не менее 75% степени заряда (должны гореть не менее 2-х зеленых светодиода), если заряд аккумуляторов составляет менее данной величины требуется подзарядить аккумуляторы. На панели управления ПУ индикатор ТК1 (поз. 3, рисунок 17) должен светиться.
— включить МР, для чего на контрольной панели МР тумблер «ПИТАНИЕ» (поз. 2, рисунок 27) перевести в верхнее положение, при этом:
а) на контрольной панели « РЕЖИМ РАБОТЫ» должны начать светиться индикаторы «КАБЕЛЬ» (поз. 4) и «ДАННЫЕ» (поз. 5);
б) на контрольной панели «АБ» индикаторы питания должны показывать степень зарядки аккумуляторных батарей не менее 50% (если заряд аккумуляторов составляет 50%, то требуется дополнительно проверить степень зарядки аккумуляторов по показаниям телеметрии).
— включить монитор кнопкой «ВКЛ» (поз. 1, рисунок 17) на панели управления монитора, при этом индикатор режима работы монитора (поз. 2) меняет свой цвет с красного на зеленый. Затем кнопкой выбора режима работы монитора через его «МЕНЮ» выбрать канал AV1*. На экране монитора появляется изображение с телевизионной камеры ТК1.
— при включении МР на мониторе панели управления ПУ отобразится информация о напряжении бортовой сети МР (поз. 1, рисунок 20) и качестве связи ПУ с МР (поз. 2).
* Примечание. По умолчанию выставлен режим AV1. При необходимости настройку монитора производить в соответствии с инструкцией по эксплуатации монитора.
3.3.5.2 Порядок включения МРК при управлении по радио
Включение МР осуществляется в следующем порядке:
— подготовить ПУ к работе в режиме управления по радио в соответствии с указаниями п. 3.3.4 настоящего РЭ;
— включить питание ПУ поворотом ключа (нажатием кнопки) « ПИТАНИЕ» (поз. 1, рисунок 21) на ПУ при этом на мониторе панели управления ПУ после загрузки программного обеспечения появится графическое окно. Вид кадра представлен на рисунке 20.
— на панели пульта включить тумблер «РАДИО» (поз. 32 рисунок 21);
-включить МР, для чего на контрольной панели МР тумблер «ПИТАНИЕ» (поз. 2, рисунок 27) перевести в верхнее положение, при этом на контрольной панели « РЕЖИМ РАБОТЫ» должны начать светиться индикаторы «РАДИО» (поз. 6) и «ДАННЫЕ» (поз. 5);
Остальной порядок включения см. 3.3.5.1.
3.3.6. Проверка на функционирование
Проверка МРК на функционирование включает:
а) проверку функционирования МР в движении;
б) проверку функционирования манипулятора;
в) контроль функционирования телевизионной системы;
г) контроль функционирования дополнительного оборудования.
Проверку функционирования МР в движении следует проводить визуально при проезде МР (8-10) м передним и задним ходом и при повороте МР на месте на угол 90°.
Проверку функционирования манипулятора осуществлять путем визуального контроля движения звеньев манипулятора на холостом ходу и автоматической остановки в крайних положениях при поочередном включении приводов соответствующих звеньев манипулятора.
Последовательность включения приводов должна исключать возможность соприкосновений подвижных частей манипулятора с неподвижными частями МР.
Контроль функционирования телевизионной системы проводить в следующем объеме:
— проверка приводов ОТУ 1 и ОТУ 2, при этом визуально контролировать перемещения ОТУ, ее остановка в конечных положениях;
— проверка телекамер ТК1, ТК2, ТК3, ТК5 и ТК6 , при этом визуально контролировать качество изображения на мониторе.
Контроль функционирования дополнительного оборудования проводить в объеме:
— возможность управления МР с технологического пульта управления в объеме п. 3.4.2.3;
— возможность проверки кабеля дистанционного управления в объеме функционирования по п.3.4.1.6;
— работоспособность зарядных устройств в объеме функционирования по п. 3.4.2.2.
— работоспособность цепей боевых линий.
Проверку функционирования цепей боевых линий проводить в следующей последовательности:
— установить переключатель «ОРУЖИЕ» (поз. 5, рисунок 21) в нижнее положение;
— подключить имитатор «Оружие» к разъему «Оружие» (рисунок 27) на контрольной панели. В качестве имитаторов использовать лампочки накаливания напряжением 24 В мощностью не более 3 Вт;
— включить ПУ и МР в соответствии с п. 3.3.5 настоящего РЭ;
— установить переключатель «Оружие» в положение «I» (рисунок 27);
— установить ключ «СПЕЦСРЕДСТВА» » (поз. 5, рисунок 21) на ПУ в положение «С1» или «С2» или «С1+С2» при этом должны начать мигать соответственно индикаторы «Боевая цепь 1» или «Боевая цепь 2» или оба вместе (поз.11, 12, рисунок 27), сигнализирующие о зарядке боевых конденсаторов. Процесс зарядки отображается на ПУ (поз. 2, рисунок 20).
Дождаться появления на ПУ информации о зарядке конденсаторов боевой цепи до напряжения 19…20В.
Проверить прохождение команды на включение боевой цепи, для чего двумя руками одновременно нажать на кнопки «ПУСК» (поз. 2 и 4, рисунок 21). Светодиоды имитатора срабатывания боевых цепей должны кратковременно засветиться. На ПУ напряжение на конденсаторах должно снизиться до значения близкого к «0»;
— вернуть ключ (поз. 5, рисунок 21) в исходное положение, при этом напряжение на конденсаторах должно снизиться до значения близкого к «0», а наличие вспышки на имитаторах БЦ 1 и БЦ 2 не допускается.
3.4. Использование МРК
3.4.1. Типовые режимы работы МРК
3.4.1.1. Управление транспортным средством
Перевести тумблер «РАБОТА» на ПУ (поз. 28, рисунок 21) в верхнее положение, при этом должен загореться индикатор.
Для движения МР вперед (назад) отклонить от себя (на себя) левый 2-х координатный джойстик с нажатой кнопкой (поз. 26). При этом мотор-звездочки вращаются в одном направлении, МР движется прямолинейно вперед или назад.
Для поворота МР отклонить левый джойстик с нажатой кнопкой в сторону поворота. При этом мотор-звездочки вращаются с различной угловой скоростью в одном или в разных направлениях. Для поворота МР на месте отклонить джойстик с нажатой кнопкой вправо или влево.
Скорость прямолинейного движения и поворота МР можно плавно регулировать от минимального до максимального значения в зависимости от величины отклонения ручки джойстика управления. Минимальному отклонению ручки джойстика управления соответствует минимальная скорость.
Перед началом прямолинейного движения МР рекомендуется:
— по монитору выбрать (при возможности) на местности ориентир, в направлении которого будет двигаться МР, выставить одну из обзорных камер ТК1, ТК2 или ТК6 вдоль продольной оси МР и довернуть МР в сторону ориентира;
— при движении вперед навести ОТУ1 или ОТУ2 на участок местности в (2-5) м от передней части МР в направлении движения, при движении задним ходом обзорную камеру навести так, чтобы иметь возможность контролировать положение кабеля (при управлении по кабелю), во избежание наезда на кабель;
— расположить манипулятор вдоль продольной оси МР, схватом назад;
— начать движение, плавно увеличивая скорость.
Скорость движения выбирать в зависимости от условий эксплуатации.
По возможности, для поворота МР следует использовать ровные горизонтальные участки с твердым грунтом или вершины (гребни) неровностей. При поворотах гусеницы необходимо приподнять, чтобы уменьшить сопротивление повороту
При движении по щебенке, гальке, снегу, песку, рыхлому грунту, глубокой колее производить минимальное количество поворотов, особенно крутых, во избежание забивания беговой дорожки грунтом, что может привести к спаданию гусениц или перегрузке двигателей мотор-звездочек.
В этих случаях поворот следует осуществлять ступенчато:
— повернуть МР на небольшой угол;
— продвинуть на (0,5-1) м вперед;
— снова повернуть и т.д.
При преодолении пороговых препятствий (вертикальной ступени, эскарпа, бордюра, шпалы и т.п.) рекомендуется расположить МР так, чтобы его продольная ось была перпендикулярна препятствию. При въезде на препятствие гусеницы слегка приподнять.
Въезд на препятствие производить на минимальной скорости и остановить МР сразу после начала переваливания (как только поплыло изображение на мониторе). Продолжать движение только после соприкосновения гусениц с поверхностью площадки.
На крутой (свыше 15°) подъем (с крутого спуска) с резким изломом въезжать (съезжать) на минимальной скорости, во избежание «клевка» и удара МР о поверхность площадки. Скорость увеличивать только после проезда МР через излом. Для увеличения устойчивости МР гусеницы опустить до поверхности движения.
Поворотов на крутом спуске следует избегать. Если это невозможно – поворачивать МР плавно (с минимальной скоростью). Повороты на большой угол (свыше 20°) выполнять ступенчато, при этом следить, чтобы не началось сползание МР юзом. Если сползание началось, остановить МР и повернуть в сторону спуска.
При движении по косогору и лестнице рекомендуется развернуть манипулятор в сторону подъема и установить схват в положение максимального удаления от оси вращения манипулятора. На крутых косогорах двигаться тем медленнее, чем круче косогор, стараться избегать поворотов в сторону подъема, для компенсации увода МР в сторону спуска рекомендуется двигаться слегка на подъем.
При движении вниз по лестнице с грузом рекомендуется развернуть манипулятор в сторону подъема и установить схват в положение максимального удаления от оси вращения манипулятора.
Участки с тяжелым грунтом (жидкая грязь, мелкий сухой песок, глубокий снег) или залитые водой преодолевать наикратчайшим путем, совершая минимальное количество поворотов. В случае начала буксования отъехать назад по колее и двигаться в объезд.
3.4.1.2. Управление телевизионной системой
При включении ПУ на экране монитора появляется изображение с телекамеры ТК-1, входящей в состав ОТУ1, при этом постоянно светится индикатор выбранной телекамеры, что свидетельствует о том, что ручка джойстика находится в режиме управления данной телекамеры.
Для управления двухкоординатным механизмом наведения телекамер необходимо включить тумблер «РАБОТА» (поз. 16, рисунок 21) и тумблер «ПРИВОД НАВЕДЕНИЯ ТК» (поз.15) (режим «включено»);
Управление ОТУ1 производится с помощью правого пропорционального 2-х координатного джойстика с кнопкой. При отклонении ручки джойстика (поз. 18, рисунок 21) от себя (на себя) “картинка” на экране “ползет” вниз (вверх). При отклонении ручки джойстика влево (вправо) телекамера разворачивается по (против) часовой стрелки.
Скорость перемещения телекамер плавно регулируется от минимального до максимального значения в зависимости от величины отклонения ручки джойстика управления.
Для работы с трансфокатором необходимо перевести тумблер «ZOOM» (поз. 17, рисунок 21) вверх (вниз) для приближения (удаления) рассматриваемого изображения.
В ОТУ1 используется ТВ-камера, которая в режиме по «умолчанию» работает в режиме автофокусировки, а при необходимости может быть переведена в режим ручной фокусировки, с помощью тумблера «ФОКУС» (поз. 14, рисунок 21).
Ручная фокусировка осуществляется путем изменения положения тумблера (вверх-вниз), в результате чего можно добиться наилучшей резкости наблюдаемого объекта.
В режиме ручной фокусировки возможен переход на автоматическую фокусировку с сохранением режима ручной фокусировки. Для этого необходимо кратковременно нажать тумблер «ZOOM».
Для работы с ОТУ2 перевести тумблер (поз. 24, рисунок 21) на панели «ТЕЛЕВИДЕНИЕ» в положение «2», при этом должен начать светиться индикатор в постоянном режиме, что свидетельствует о том что ручка джойстика (поз.18, рисунок 21) переведена в режим управления ОТУ2. При этом появляется изображение в основном окне монитора с телекамеры «ТК2», установленной в ОТУ2.
Аналогично выбираются и телекамеры ТК3, ТК5 и ТК6.
Для работы с дополнительными телекамерами подключаемыми на распределительной коробке манипулятора и панели управления МР перевести тумблер (поз. 19, рисунок 21) в положение «ТК4». При этом начнет светиться индикатор и появится изображение в основном окне экрана монитора.
Внимание! Одновременное подключение двух дополнительных телекамер к разъемам ТК-4 не допускается.
3.4.1.3. Погрузочно-разгрузочные работы с помощью манипулятора
Если манипулятор находится в транспортном положении его необходимо развернуть в рабочее положение. Для этого нужно на панели «Выбор меню команд» перевести тумблер (поз.10, рисунок 21) в позицию 5, при этом на дисплее панели управления появится соответствующее «МЕНЮ 5» из 4-х строк. Выбор команды «Рабочее положение ПМ» производится нажатием соответствующей кнопки напротив названия команды (поз.12).
При работе с манипулятором перевести тумблер «РАБОТА» (поз. 16, рисунок 21) в положение «ВКЛ», при этом должен начать светиться индикатор.
Для работы с плечом перевести тумблер (поз.21) на панели «ВЫБОР ГРУППЫ ПРИВОДОВ» в положение «6», при этом должен начать светиться индикатор. Для подъема (опускания) плеча отклонить на себя (от себя) ручку правого джойстика (поз. 18). Для поворота плеча по (против) часовой стрелке отклонить влево (вправо) ручку правого джойстика (поз. 18). Для работы с предплечьем перевести тумблер (поз. 22) на панели «ВЫБОР ГРУППЫ ПРИВОДОВ» в положение «2», при этом должен начать светиться индикатор. Для подъема (опускания) предплечья манипулятора отклонить на себя (от себя) ручку правого джойстика (поз. 18). При работе с конечным звеном манипулятора (кистью) перевести тумблер (поз.21) на панели «ВЫБОР ГРУППЫ ПРИВОДОВ» в положение «3», при этом должен начать светиться индикатор. Для подъема (опускания) кисти манипулятора отклонить на себя (от себя) ручку правого джойстика (поз. 18). Для ротации схвата кисти по (против) часовой стрелке отклонить вправо (влево) ручку правого джойстика (поз. 18).
Скорость подъема (опускания) звеньев и поворота манипулятора можно плавно регулировать от минимального до максимального значения, в зависимости от величины отклонения ручки правого джойстика (минимальному отклонению соответствует минимальная скорость).
При нажатии на кнопку джойстика можно работать со схватом при любом включенном звене манипулятора. Охватить груз губками схвата как можно ближе к центру масс и произвести закрытие схвата отклоняя ручку правого джойстика на себя (от себя). Величина усилия сжатия кисти будет пропорциональна углу отклонения ручки джойстика. В МР схват отключается автоматически при зажатии детали до установленного нормируемого усилия 800 или 1000 Н. При этом предусмотрена механическая защита.
При работе с манипулятором оператору необходимо учитывать следующее:
— если масса груза близка к предельно допустимой (30 кг), подъем звеньев и поворот манипулятора выполнять с минимальной скоростью и амплитудой;
— длинные тяжелые предметы рекомендуется захватывать за среднюю часть, при манипуляциях такими предметами – избегать ударов о МР.
Постоянно установлены в схвате манипулятора прямые губки с колодкой (поз. 7, рисунок 12), которые обеспечивают захват рабочего оборудования и плоских предметов.
Внимание! При повороте манипулятора необходимо следить за тем, чтобы манипулятор и груз не задевали за элементы конструкции МР.
Зона обслуживания манипулятора определяется величиной вылета манипулятора – 1,5 м и ограничениями накладываемые конструктивными элементами МР. Для предотвращения наезда звеньев манипулятора на элементы конструкции МР и друг на друга введены зоны запрета для работы манипулятора, при достижении которых запрещаются движения в определенных направлениях, а разрешены только в обратную сторону.
3.4.1.4. Транспортирование грузов и проведение специальных работ
Управление МР при транспортировании грузов в схвате манипулятора осуществлять аналогично описанному в п. 3.4.1.1 настоящего руководства. При этом необходимо учитывать, что нагруженный МР более склонен к опрокидыванию на крутых спусках и к застреванию на участках с тяжелым грунтом.
При использовании дополнительного технологического оборудования возможно проведение с помощью МР специальных работ. Действия оператора при проведении таких работ изложены в разделе 3.4.2 руководства по эксплуатации
3.4.1.5. Проведение разведывательных работ
Управление МР при проведении разведывательных работ осуществлять аналогично описанному в п.п. 3.4.1.1 и 3.4.1.2 настоящего РЭ. При этом необходимо постоянно отслеживать положение МР (по ориентирам на местности).
Маршрут движения МР следует наносить на план (схему, фотографию и т.д.) местности.
Визуальная разведка производится с использованием телевизионной системы МР.
Для определения опасных фактор на борту МР установлены температурные датчики (поз.13 , рисунок 1), датчики крена-дифферента, блок детектирования гамма-излучения БДМГ-36 (поз.14) и газоанализатор ГСА-3 (поз.15). Информация с них отображается в графическом окне монитора панели управления ПУ (поз. 3, 4, 5, и 6, рисунок 20). Использование данных датчиков и приборов в соответствии с их эксплуатационной документацией.
3.4.1.6. Работа МРК при управлении по кабелю
Управление по кабелю МРК осуществляется с ПУ. Переход на управление с радиоканала на кабель и обратно производится автоматически после выключения МР и подключения катушки с кабельной линией управления к МР и ПУ. Порядок подготовки, включения и управления в режимах по «Радио» и по «Кабель» изложен в разделе включения МРК подразделы 3.3.3 и 3.3.4 настоящего РЭ.
Порядок управления МРК в режиме работы по кабелю аналогичен режиму управления по радиоканалу.
При движении задним ходом обзорную камеру навести так, чтобы иметь возможность контролировать положение кабеля во избежание наезда на кабель.
3.4.2. Порядок работы с дополнительным оборудованием
Дополнительное оборудование транспортируется к месту проведения работ в штатной упаковке – чемоданах, ящиках или размещены в АБР-РОБОТе или другом автомобиле сопровождения.
3.4.2.1. Работа с комплектом сменных губок
Основой комплекта являются губки схвата прямые с колодкой (поз. 7, рисунок 12), которые постоянно установлены в схвате манипулятора и обеспечивают захват рабочего оборудования и плоских предметов.
При необходимости выполнения работ по захвату мелких предметов, расположенных в щелях шириной 20 мм и более и глубиной до 200 мм и отверстиях диаметром 40 мм и более, овальных предметов размером до 160 мм, а также цилиндрических предметов диаметром от 50 до 200 мм, необходимо использовать специальные губки из комплекта (рисунок 26):
— узкие удлиненные губки для захвата мелких предметов, расположенных в щелях шириной 20 мм и более и глубиной до 200 мм и отверстиях диаметром 40 мм и более (поз. 2);
— губки типа грейфер с диаметром внутренней полости 160 мм (поз. 1);
— губки для захвата цилиндрических предметов диаметром от 50 до 200 мм (поз. 3).
Замену губок из комплекта производить следующим образом:
— развести губки в схвате манипулятора;
— нажать на рычаг фиксатора (поз. 10, рисунок 12) и снять губки прямые;
— вынуть из штатной упаковки необходимые для проведения данного вида работ губки, протереть ветошью места присоединения губок с колодкой и установить их на место;
— проверить надежность фиксации губок в колодке;
— уложить снятые губки на штатное место в упаковке;
Проверить функционирование губок. После этого губки готовы к работе.
3.4.2.2. Работа с зарядными устройствами
Зарядку эксплуатируемых аккумуляторных батарей необходимо проводить, используя штатные кабели ЗУ.
Перед использованием ЗУ проверить их на функционирование в следующем порядке:
— подключить вилки (поз. 8, рисунок 24) зарядных устройств к сети переменного тока 220 В;
— последовательно замкнуть проводниками контакты разъемов или подключить к контактам автомобильную лампу накаливания на 55-110 Вт и вращая по часовой стрелке регулятор силы тока убедиться, что ток регулируется, а яркость свечения лампы меняется:
а) к контактам 1 и 2 разъема (поз. 7) ЗУ (“ Орион PW260” или “ ОрионPW265”);
б) к контактам 1 и 2 разъема (поз. 9) ЗУ (“ Орион PW320” или “ Орион PW325”);
в) к контактам 3 и 2 разъема (поз. 9) ЗУ (“ Орион PW320” или “ Орион PW325”).
— отключить вилки (поз. зарядных устройств от сети переменного тока 220 В;
Зарядку МР производить, используя два зарядных устройства “Орион PW320” или“ОрионPW325” в следующей последовательности:
— подключить разъем кабеля зарядного устройства (поз. 9, рисунок 24) к разъему « Зарядка» (поз. 7, рисунок 27) МР;
— вращая регуляторы силы тока (поз. 3, рисунок 24) против часовой стрелки, установить их на обоих зарядных устройствах (поз. 2) в крайнее левое положение (минимальный ток);
— подключить вилки (поз. зарядных устройств к сети переменного тока 220 В;
— вращая регуляторы силы тока (поз. 3) по часовой стрелке, установить ток заряда в пределах 6 — 9 А, а при ускоренном заряде – 15 А.
При ускоренном заряде необходимо постоянно контролировать газовыделение, не допуская «закипания» аккумуляторов.
Сила тока устанавливается регулятором плавно. Заряд будет проходить в автоматическом режиме током, установленным ручкой регулировки. При достижении на аккумуляторной батареи напряжения, равного 14,6 В, ток автоматически уменьшается, зарядное устройство переходит в буферный режим, при котором саморазряд аккумуляторной батареи компенсируется требующимся током заряда.*
По окончании заряда отключить зарядное устройство от сети и отсоединить разъем «Зарядка» от МР.
* Самопроизвольное уменьшение тока в начале заряда может свидетельствовать о наличии сульфатации пластин аккумуляторной батареи. Уменьшив ток, зарядное устройство автоматически переходит в режим десульфатации аккумуляторной батареи. В зависимости от степени поражения пластин, на десульфатацию может потребоваться от нескольких минут до нескольких часов. В процессе десульфатации ток постепенно автоматически возрастет до значения выставленного регулятором тока.
Зарядку блока питания ПУ производить, используя штатное зарядное устройство или зарядное устройство “ Орион PW260” или “ Орион PW265” в следующей последовательности:
— подключить разъем кабеля (поз. 7) зарядного устройства «Зарядка ПУ» к разъему блока питания ПУ.
Порядок работы с зарядным устройством изложен выше при этом необходимо установить ток заряда не более 3А.
Время зарядки полностью разряженного источника питания: МР не менее 10 часов, ПУ – не менее 5 часов.
Использование зарядного устройства в качестве источника питания.
Зарядное устройство является источником стабилизированного напряжения постоянного тока с ограничением (стабилизацией) силы тока нагрузки и поэтому может быть применено для запитки любых потребителей тока напряжением 14,6 В с суммарным током потребления меньше выставленного ручным регулятором тока. При перегрузке, либо аварийном замыкании выходных проводов, зарядное устройство переходит в режим стабилизации тока.
При работе ПУ от сети переменного тока 220В 50, Гц ЗУ подключается в гнездо блока питания ПУ при этом выставляется ток не менее 3А (при включенном мониторе 6А). Порядок работы с ЗУ изложен выше.
Внимание! При зарядке аккумуляторов возможно образование взрывоопасной смеси. Зарядку проводить в хорошо проветриваемом помещении. Зарядку аккумуляторов МР проводить только при снятой крышке аккумуляторного отсека.
3.4.2.3. Работа с технологическим пультом управления
Для проведения работ с технологическим пультом управления (рисунок 25) произвести подготовку его к работе в следующем порядке:
— вынуть из штатной упаковки технологический пульт управления и протереть мягкой чистой ветошью;
— снять транспортную заглушку с разъема «Пульт» (поз. 1, рисунок 27) на лицевой панели МР;
— подсоединить кабель к разъему «Пульт» МР;
— включить МР, для чего установить на панели управления МР тумблер «Питание» (поз. 2) в верхнее положение, при этом должны начать светиться индикаторы степени зарядки аккумуляторных батарей (поз. 3, 8 и 9) на панели АБ мобильного робота и загореться все индикаторы на технологическом пульте управления, а затем погаснуть кроме одного;
— выбрать привод согласно рисунка на технологическом пульте управления нажатием кнопки, при этом выбранная кнопка подсветится;
— выполнить движения выбранным приводом, используя ручку управления на технологическом пульте управления. Управление ручкой пропорциональное – большее отклонение соответствует большей скорости перемещения привода.
3.4.2.4. Работа с установкой пожаротушения тонкораспыленной водой
Для проведения работ с использованием установки пожаротушения тонкораспыленной водой УПТВ-50, катушка с рукавом высокого давления навешивается на МР (поз. 1, (рисунок 29), распылитель поз. 1 (рисунок 30) устанавливается на звене манипулятора и они подключаются к клапанной коробке поз. 3 (рисунок 29). Клапанная коробка подключается к разъему поз. 4.
2
3
4
1
Рисунок 29
1
Рисунок 30
Укладка шланга по манипулятору показана на рисунке 31.
Рисунок 31
Порядок работы с УПТВ-50 в ее руководстве по эксплуатации.
Для включения подачи воды на ПУ тумблером «ВЫБОР МЕНЮ КОМАНД» выбрать «3», в графическом окне монитора панели управления ПУ отобразятся команды «Меню 3».
Нажать кнопку напротив команды «Подача воды». Визуально наблюдать исполнение команды на МР. Управляю манипулятором направить струю на объект. Для изменения распыла струи нажать кнопку напротив команды «Компактная струя». Для отмены команд повторно нажать соответствующие кнопки.
Для охлаждения МР на клапанной коробке установлен распылитель (поз. 2 рисунок 29). Для включения режима охлаждения МР необходимо тумблером «ВЫБОР МЕНЮ КОМАНД» выбрать «2» и нажать кнопку напротив команды «Орошение». Визуально наблюдать исполнение команды на МР.
3.4.2.5. Работа с модулем водопенного пожаротушения
Порядок заправки водопенного модуля согласно инструкции по его эксплуатации. Модуль навешивается на МР (рисунок 32). Подключение модуля и работа с ним в составе МР согласно п. 3.4.2.4.
Рисунок 32
3.4.2.6. Работа с модулем порошкового пожаротушения
Порядок заправки порошкового модуля и соблюдения правил техники безопасности согласно инструкции по его эксплуатации. Модуль навешивается на МР (рисунок 33). Пиропатрон подключается кабелем к разъему «Оружие» (рисунок 27).
Рисунок 33
Внимание ! Подключение проводить строго в следующей последовательности:
— свободные концы кабеля скруткой подключить к пиропатрону;
— при выключенном МР и выключенном тумблере (в нижнем положении) (поз. 10, рисунок 27) подключить кабель к разъему «Оружие»;
— включить МР;
— перевести тумблер в верхнее положение «I».
Для активации порошкового модуля необходимо на ПУ повернуть ключ «СПЕЦСРЕДСТВА» в положение «С2». Начнется зарядка боевых конденсаторов. Процесс зарядки контролировать по показаниям окна «Конденсаторы» (поз. 2, рисунок 20). При достижении значения зарядки 19…20В боевая цепь готова к работе. Нажатием двух тумблеров «ПУСК» (поз. 2 и 4, рисунок 21) инициировать порошковый модуль. Перед активацией МР повернуть в сторону объекта.
Вместо распылителя (поз. 1, рисунок 33) может устанавливаться успокоитель в схвате манипулятора и с помощью шланга подключаться к порошковому модулю. В зависимости от применяемого типа распылителя («елочка» или успокоитель) применяются различные марки порошков.
3.4.2.7. Работа с пеногенератором
Пеногенератор ГПВК устанавливается в схвате манипулятора (поз.1, рисунок 34).
1
Рисунок 34
С помощью шланга подключается к фланцу переходнику, закрепленном на МР (рисунок 35).
Рисунок 35
Подача раствора пенообразователя на пеногенератор осуществляется от внешнего источника по рукавной линии. В качестве внешнего источника может использоваться пожарный автомобиль, оснащенный пенно-баком и системой дозирования пенообразователя. Рабочее давление на пеногенераторе должно быть в диапазоне 4÷8 атм. при расходе 1л/с. Применяемый пенообразователь по своим характеристикам обеспечивает получение высокократной пены (более 200).
Направление подачи струи пены производится с помощью команд подаваемых на исполнительные механизмы манипулятора.
3.4.3. Возможные неисправности и способы их устранения
Перечень возможных неисправностей и способы их устранения приведены в таблице 4.
Таблица 4
Возможная
неисправность
Вероятная причина Способ устранения При-
мечание
1. МР не выполняет команды ПУ 1.1 Не включено питание МР или ПУ. 1.1 Перевести тумблеры МР (поз. 2, рисунок 27) и ключ питания ПУ (поз.1, рисунок 21) в положение “Включено”. 1.2 Разряжены аккумуляторные батареи МР или ПУ. 1.2 Зарядить аккумуляторные батареи МР и ПУ. 1.3 Не установлена приёмная антенна ДУ (поз.4, рисунок 2) на МР 1.3 Установить приёмную антенну ДУ на МР 2. Самопроизвольное отключение МРК.
2.1 Нарушены контактные соединения в разъёмах МР и ПУ. 2.1 Проверить контактные соединения в разъёмах МР и ПУ. 2.2 Разряжены аккумуляторные батареи ПУ или МР. 2.2 Проверить аккумуляторные батареи и при необходимости зарядить или заменить. 3. Отсутствует видеоизображение на дисплее ПУ 4.1 Разряжены аккумуляторные батареи МР. 4.1 Проверить аккумуляторные батареи и при необходимости зарядить или заменить. 4.2 Нет контакта в разъемах подключения телекамер 4.2 Проверить правильность подключения разъемов. 4. Сброс гусеницы 5.1 Попадание посторонних предметов в гусеницу 5.1 При первых признаках сброса гусеницы оператор обязан прекратить разворот и, по возможности, дать МР прямолинейное движение вперед — назад, чтобы гусеница встала на место. 3.4.4. Порядок выключения МРК
3.4.4.1. Установить все органы управления на ПУ в положение, описанное в подразделе 3.3.3 настоящего руководства.
3.4.4.2. Выключить ПУ поворотом ключа «Питание» (нажатием кнопки) (поз. 1, рисунок 21).
3.4.4.3. Выключить МР, для чего установить тумблер «Питание» (поз. 2, рисунок 27), расположенный на панели управления ТС, в нижнее положение.
4. Техническое обслуживание изделия
4.1. Общие указания
В процессе использования изделия по назначению необходимо проводить ежедневное техническое обслуживание (ЕТО) и контрольный осмотр (КО).
Техническое обслуживание (ТО) изделия проводить в объеме, указанном в настоящем РЭ, при отключенном питании.
При эксплуатации МРК содержать в чистоте, оберегать сборочные единицы от ударов. Загрязненные поверхности МР и аппаратуры ПДУ очищать водой или моющими средствами. Протирку неметаллических поверхностей производить чистой ветошью, смоченной в воде или в растворах синтетических моющих средств. При необходимости нанесения новой смазки, старую смазку удалить ветошью, смоченной в бензине ГОСТ 2084-77.
Следить за наличием влаги в корпусе МР. При ее появлении снять крышки, удалить влагу ветошью и просушить МР в теплом помещении.
Элементы оптики телекамер протирать только чистой фланелевой или батистовой тряпкой, смоченной в этиловом спирте ГОСТ Р51652-2001.
При хранении МРК производить техническое обслуживание МРК через 2,5 года.
Техническое обслуживание МРК проводит персонал, работающий на данном МРК и прошедшие специальную подготовку или специалисты, изучившие конструкцию изделия и настоящее РЭ и получившие разрешение на проведение ТО.
4.2. Меры безопасности
Все работы по техническому обслуживанию МРК должны осуществлять только лица, допущенные к работе с МРК и прошедшие инструктаж по технике безопасности.
На месте проведения ТО должны соблюдаться меры электро- и пожаробезопасности.
ТО должны проводиться бережно и аккуратно, исключая при этом соударения, поломки, вмятины на обслуживаемых блоках.
ТО проводить исправным инструментом, а при работе с маслом – в защитных перчатках.
Запрещается использование растворителей для протирки пластмассовых панелей и деталей изделия.
Запрещается проведение самостоятельного вскрытия корпусов и ремонта узлов и механизмов изделия.
Не допускается производить зарядку автономных источников питания без присмотра. Перед зарядкой все тумблеры питания должны быть переведены в положение “Выкл.”.
Во время зарядки автономных источников питания запрещается производить ремонтные и профилактические работы, а также проверять работоспособность изделия.
Соблюдать осторожность при работе с зарядными устройствами, так как при включённом состоянии в них имеется опасное для жизни напряжение ~ 220 В, 50 Гц. Во избежание несчастных случаев категорически запрещается включать зарядные устройства при снятых крышках.
Запрещается производить любые перестыковки кабелей при включенном МРК.
При проверке функционирования МРК запрещается находиться ближе двух метров от МР.
4.3. Порядок и виды технического обслуживания МРК
4.3.1. Ежедневное техническое обслуживание
Ежедневное техническое обслуживание (ЕТО) осуществлять после окончания работы с МРК. Трудоемкость ЕТО – 1 человеко-час.
Объем проверок изделия при проведении различных видов ТО при эксплуатации представлен в таблице 5.
Таблица 5
Виды работ при техническом
обслуживании Виды и периодичность технического обслуживания
ЕТО Через каждые 50 часов
(3 месяца) Через каждые 100 часов
(6 месяцев) Через каждые 500 часов
(2,5 года)
1. Очистка изделия от грязи и пыли, протирка насухо. Проверка наличия влаги в корпусе МР, при ее появление удалить протиркой и просушить. 2. Протирка оптических устройств. 3. Осмотр крепежных соединений. 4. Проверка сохранности кабелей и разъемов 5. Контроль заряда аккумуляторных батарей (АИП) и их подзарядка. 6. Проверка крепления и затяжка ослабленных резьбовых соединений двигателей, редукторов и шасси. 7. Замена смазки трущихся поверхностей 8. Проверка целостности элементов гусениц 9. Проверка и регулировка защитных муфт 10. Регулирование цепных передач манипулятора 11. Восстановление защитно-декоративного покрытия.
12. Замена аккумуляторных батарей (АИП)
Все наружные поверхности изделия по окончании рабочего процесса необходимо тщательно промыть до полного удаления пыли, песка и грязи, после чего протереть насухо и высушить на воздухе в течение 2 – 3 часов.
Затяжку резьбовых соединений производить только с помощью инструмента, не допуская срывов резьбы.
Для предотвращения сокращения срока службы рекомендуется постоянно следить за техническим состоянием изделия.
4.3.2. Контрольный осмотр
Контрольный осмотр (КО) МРК проводить ежедневно после ЕТО согласно подраздела 4.3.1 настоящего РЭ. Трудоемкость КО – 0,5 человеко-час.
4.3.2. Техническое обслуживание при хранении
При хранении МРК через 2,5 года производить визуальный контроль состояния МРК, при этом устранять обнаруженные следы коррозии и возобновлять смазку.
При обнаружении во время осмотра МРК значительных повреждений (вмятин, следов коррозии и т.д.) или в случае отклонения условий хранения от заданных в разделе 5 настоящего РЭ, необходимо произвести расконсервацию МРК и проверку его функционирования. Устранить выявленные недостатки или обратиться в ремонтную организацию.
4.4. Проверка работоспособности МРК
Собранный после проведения ремонта МРК необходимо проверить на функционирование согласно подразделу 3.3.6 настоящего руководства.
4.5. Консервация (расконсервация, переконсервация)
4.5.1. Расконсервация
4.5.1.1. Чистой х/б ветошью удалить смазку с открытых поверхностей штоков электромеханизмов МР и деталей механизмов натяжения, совершающих поступательное движение.
4.5.1.2. Чистой х/б ветошью обтереть ПУ, монитор, антенны и кабели.
4.5.1.3. Металлические части ПУ, антенн и кабелей, покрытые смазкой, промыть бензином Б-95/130 или Б91/115 ГОСТ 1012-72.
4.5.1.4. Снять с соединителей транспортировочные крышки.
4.5.1.5. Промыть соединители спиртом-ректификатом ГОСТ 18300-87.
4.5.1.6. При обнаружении нарушений лакокрасочного покрытия их устраняют подкраской эмалью МЛ-165 ГОСТ 12034-77 исходного цвета.
4.5.2. Консервация (переконсервация)
4.5.2.1. Кабельные и блочные части соединителей очистить (при необходимости) от влаги, грязи, посторонних предметов и промыть спиртом-ректификатом. Первые 2-3 витка резьбовых частей соединителей покрыть тонким слоем смазки ГОИ-54П ГОСТ 3276-89, после этого на соединители до упора навинтить транспортировочные крышки. Попадание смазки на электрические контакты соединителей не допускается.
4.5.2.2. Удалить конденсированную влагу, пыль, грязь с поверхностей, указанных в п. 4.5.2.1 и нанести на них тонкий слой смазки ГОИ-54П.
4.5.2.3. На металлические части ПУ нанести тонкий слой смазки ГОИ-54П.
4.5.2.4. Переконсервацию МРК проводить по мере необходимости, но не реже одного раза в год. Проводят расконсервацию и затем консервацию МРК.
4.5.2.5. После проведения расконсервации или консервации (переконсервации) МРК необходимо сделать соответствующую запись в формуляре.
4.6. Перечень основных и дублирующих ГСМ, применяемых в изделии
Основным ГСМ, применяемым в изделии, является смазка Литол 24 ГОСТ 21150-87. Дублирующим эквивалентом может служить масло смазочное ОКБ-122-7 ГОСТ18179-72.
5. Хранение
Перед постановкой на хранение необходимо провести техническое обслуживание МРК согласно разделу 4.6 настоящего РЭ.
Аккумуляторы хранить отдельно в соответствии с требованиями на аккумуляторы.
Хранение МРК производить в отапливаемых помещениях при температуре окружающего воздуха от +5 до +40°С и относительной влажности воздуха до 85% при температуре +20°С.
Резкие перепады температуры и влажности не допускаются. В помещениях для хранения не должно быть пыли, паров кислот и щелочей, агрессивных газов и других вредных примесей, вызывающих коррозию.
Срок хранения МРК 2 года.
Периодичность технического обслуживания во время хранения 1 год.
Периодичность технического обслуживания аккумуляторов МР и ПУ во время хранения – в соответствии с нормативно-технической документацией на них.
6. Транспортирование
6.1. При транспортировании МРК должны быть обеспечены следующие условия:
— максимальная температура воздуха не выше +50°С;
— минимальная температура воздуха не ниже минус 40°С;
— относительная влажность воздуха (при +25°С) не выше 98 %.
6.2. Перед погрузкой на транспортное средство манипулятор должен находиться в транспортном положении.
МР, ПУ и ящики с устройствами должны быть закреплены на транспортном средстве таким образом, чтобы исключалась возможность их смещения и соударения.
Гусеницы МР должны быть зафиксированы упорами. Дополнительно МР должен быть закреплен растяжками.
6.3. При транспортировании МРК следует укрыть брезентом для предохранения от дождя, снега, пыли и т.п.
6.4. Транспортирование МРК может осуществляться:
— авиационным, железнодорожным, водным транспортом без ограничения дальности и скорости;
автомобильным транспортом по шоссе с асфальтобетонным покрытием со скоростью до 80 км/ч.
6.5. Погрузку, крепление и перевозку МРК осуществлять в соответствии с правилами, действующими на данном виде транспорта.
7. Гарантийные обязательства
Изготовитель гарантирует безотказную работу МРК-РП при соблюдении правил эксплуатации, технического обслуживания и хранения, изложенных в настоящем руководстве по эксплуатации.
Гарантийный срок эксплуатации – 24 месяца с момента поставки изделия Заказчику или в течении 200 часов наработки.
Ремонт МРК производит предприятие-изготовитель.
Дата ввода в эксплуатацию:
(подпись ответственного лица)

- Manuals
- Brands
- ABB Manuals
- Robotics
- IRB 14000
- Operating manual
-
Contents
-
Table of Contents
-
Bookmarks
Quick Links
ROBOTICS
Operating manual
IRB 14000
Related Manuals for ABB IRB 14000
Summary of Contents for ABB IRB 14000
-
Page 1
ROBOTICS Operating manual IRB 14000… -
Page 2
Trace back information: Workspace R18-1 version a11 Checked in 2018-03-25 Skribenta version 5.2.025… -
Page 3
Operating manual IRB 14000 RobotWare 6.07 Document ID: 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 4
The information in this manual is subject to change without notice and should not be construed as a commitment by ABB. ABB assumes no responsibility for any errors that may appear in this manual. Except as may be expressly stated anywhere in this manual, nothing herein shall be construed as any kind of guarantee or warranty by ABB for losses, damages to persons or property, fitness for a specific purpose or the like. -
Page 5: Table Of Contents
Safety terminology ……………….. 1.5.1 Safety signals in the manual …………..1.5.2 Protective stop and emergency stop …………Introduction to the IRB 14000 robot system What is IRB 14000? ………………. What is a FlexPendant? ………………What is RobotWare? ………………What is RobotStudio? ………………
-
Page 6
Table of contents 5.3.5 Arm-Angle Reference Direction …………..5.3.6 Limit avoidance distance …………….5.3.7 Collision Detection Memory …………… 5.3.8 Friction compensation lead through factor ……….. Index Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 7: Overview Of This Manual
Overview of this manual Overview of this manual About this manual This manual contains instructions for daily operation of the IRB 14000 robot system. Usage This manual should be used during operation. Who should read this manual? This manual is intended for: •…
-
Page 8
Updated the system parameter Connection Timeout Multiplier on page • Updated the Limitations section of the system parameter Arm-Angle Definition on page • Safety section restructured. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 9: Product Documentation
Product documentation Categories for user documentation from ABB Robotics The user documentation from ABB Robotics is divided into a number of categories. This listing is based on the type of information in the documents, regardless of whether the products are standard or optional.
-
Page 10
The operating manuals describe hands-on handling of the products. The manuals are aimed at those having first-hand operational contact with the product, that is production cell operators, programmers, and troubleshooters. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 11: Safety
These topics are covered in the Product Manuals supplied with the robot. Note The integrator is responsible for the safety of the final application. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 12: Applicable Safety Standards
Only robots with protection Clean Room. Deviations from ISO 10218-1:2011 ISO 10218-1:2011 was developed with conventional industrial robots in mind. Deviations from the standard are motivated for IRB 14000 in the table below. More information about ISO 10218-1 compliance is given in technote_150918. Requirement…
-
Page 13
Requirement Deviation for IRB Motivation 14000 §5.12.1 Limiting the IRB 14000 does not The IRB 14000 robot is intended for collab- range of motion by ad- have adjustable mech- orative applications where contact between justable stops anical stops or provi- robot and the operator is harmless. -
Page 14: Safety Actions
The plant designer may have placed additional emergency stop devices in convenient places. Refer to your plant or cell documentation to find out where these are placed. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 15: Recover From Emergency Stops
Locate and reset the device or devices that gave the emergency stop condition. Press the Motors On button on the Quickset menu on the FlexPendant to recover from the emergency stop condition. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 16: Extinguishing Fires
Select fire extinguisher Always use carbon dioxide extinguishers when extinguishing fires in electrical equipment such as the robot or the controller. Do not use water or foam. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 17: Working In A Safe Manner
Always test the emergency stop button to make sure it works if a custom connection cable is used. Personal protective equipment Always use suitable personal protective equipment, based on the risk assessment for the robot installation. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 18: About The Manual Mode
The safety stop mechanism and the Cartesian speed supervision are always active, both while operating in manual and automatic mode. Operating speed In manual reduced speed mode the movement is limited to 250 mm/s. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 19: About The Automatic Mode
A welding manipulator needs maintenance. Taking the welding manipulator out of production also means that a work bench as well as a material handling manipulator must be taken out of production to avoid personnel hazards. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 20: Safety Terminology
ELECTROSTATIC Warns for electrostatic hazards which could result DISCHARGE (ESD) in severe damage to the product. xx0200000023 Continues on next page Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 21
Significance NOTE Describes important facts and conditions. xx0100000004 Describes where to find additional information or how to do an operation in an easier way. xx0100000098 Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 22: Protective Stop And Emergency Stop
1.5.2 Protective stop and emergency stop 1.5.2 Protective stop and emergency stop Overview The protective stops and emergency stops are described in the product manual for the robot. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 23: Introduction To The Irb 14000 Robot System
6-axis robots. The IRB 14000 integrated controller The IRB 14000 integrated controller is based on the standard IRC5 controller, and contains all functions needed to move and control the robot. The robot control software, RobotWare, supports every aspect of the robot system, such as motion control, development and execution of application programs, communication etc.
-
Page 24: What Is A Flexpendant
2 Introduction to the IRB 14000 robot system 2.2 What is a FlexPendant? 2.2 What is a FlexPendant? Introduction to the FlexPendant The FlexPendant is a hand held operator unit used to perform many of the tasks involved when operating a robot system, such as running programs, jogging the manipulator, modifying robot programs and so on.
-
Page 25: What Is Robotware
2.3 What is RobotWare? Introduction to RobotWare RobotWare is a family of software products from ABB Robotics. The products are designed to make you more productive and lower your cost of owning and operating a robot. ABB Robotics has invested many years into the development of these products and they represent knowledge and experience based on several thousands of robot installations.
-
Page 26: What Is Robotstudio
2.4 What is RobotStudio? Overview RobotStudio is an engineering tool for the configuration and programming of ABB robots, both real robots on the shop floor and virtual robots in a PC. To achieve true offline programming, RobotStudio utilizes ABB VirtualRobot™ Technology.
-
Page 27: What Is Robotstudio Online
2 Introduction to the IRB 14000 robot system 2.5 What is RobotStudio Online? 2.5 What is RobotStudio Online? Introduction to RobotStudio Online RobotStudio Online is a suite of Windows Store applications intended to run on Windows 10 tablets. It provides functionality for the shop floor commissioning of robot systems.
-
Page 28
2 Introduction to the IRB 14000 robot system 2.5 What is RobotStudio Online? Continued RobotStudio Online Apps Description Jog is a tool for manual positioning (moving or jogging) with IRC5 controllers. xx1400002048 Tune is a tool for shop floor editing of RAPID programs with IRC5 controllers. -
Page 29: Using The Irb 14000
The axes of the robot can be jogged manually using the joystick. The following illustration shows the location and movement patterns for each axis. xx1500000254 Continues on next page Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 30
Y axis. Twisting the joystick will move the robot along the Z axis. xx1500000007 Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 31: Jogging
For more information on how to jog robots, see the Jogging section in Operating manual — IRC5 with FlexPendant. Note This manual only describes the settings that are specific for the IRB 14000. The jogging window The jogging functions are found in the Jogging window. The most commonly used are also available under the Quickset menu.
-
Page 32
Note that the operator panel is located under the Quickset menu. For more information on how to switch between manual and automatic mode, see Operating modes on page Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 33: Motion Modes
The tool center point is rotated around the direction of the selected coordinate system’s axes. The arm mode The IRB 14000 robot, with seven axes, has one additional motion mode, the arm mode. All of the other jogging settings are the same as for other robots. •…
-
Page 34: Coordinated Jogging
3.2.3 Coordinated jogging Introduction The IRB 14000 robot is pre-installed with the RobotWare option MultiMove coordinated, which makes it possible to jog the two arms in coordinated mode. Coordinated jogging has to be setup by creating a coordinated work object. The work object should be setup for the arm that is holding the work piece.
-
Page 35
Turn off coordination in one of following ways: • Click the Turn coordination off button on the Quickset menu. • Deactivate the work object. • Deactivate the work object coordinate system. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 36: Lead-Through
If the load is lighter than defined, the effect will be the same as if you are pulling the robot arm upwards. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 37: Operating Modes
Introduction The IRB 14000 has two operating modes, Manual mode and Automatic mode. Note Note that the IRB 14000 does not go to motors off when changing the operating mode. Note The IRB 14000 goes automatically to motors on when jogging or when tapping the play button or step button on the FlexPendant.
-
Page 38
Note It is also possible to use the predefined I/O-signals to change and confirm the operating mode, see I/O signals on page Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 39: Collision Avoidance
3.5 Collision avoidance Introduction The IRB 14000 has a built in functionality called Collision Avoidance that is active both during jogging and when running programs. Collision avoidance monitors the geometrical models of the robot arms and the body, and the robot stops if any of the parts get too close to each other.
-
Page 40
The safety distance between two links can be decreased by adding a row to this XML file, but it cannot be increased to a higher value than defined by the system parameter Coll-Pred Safety Distance. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 41: Collision
3.6 Collision 3.6 Collision Overview This section provides you an overview of the response of IRB 14000 robot system in the case of a collision. Collision If a collision is detected on an arm, the collided arm stops and the other arm keeps moving.
-
Page 42: Programming And Testing
The arm-angle can, in a simplified way, be described as the angle of the arm seen from an axis that goes from the centre of axis 2 to the centre of the WCP (wrist Continues on next page Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 43
Coordinated programming using MultiMove The IRB 14000 robot is pre-installed with the RobotWare option MultiMove coordinated, which makes it possible to program the two arms in coordinated mode. For more information about MultiMove and coordinated jogging, see Application manual — MultiMove. -
Page 44
For more information, see Technical reference manual — RAPID Instructions, Functions and Data types. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 45: I/O Signals
3.8 I/O signals 3.8 I/O signals Introduction It is possible to connect different types of I/O signals to the IRB 14000, both digital I/O signals and different types of fieldbuses (industrial networks). For more information about connecting I/O signals, see Product manual — Product.ProductName and Circuit diagram — IRB 14000.
-
Page 46: User Authorization
Limit or Global Speed Limit an event message will take focus on the FlexPendant after restart to notify the user of the change. For more information about the system parameters, see System parameters on page Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 47: Calibration
A fine calibration should only be performed by a qualified service engineer. For more information see section Calibration in Product manual — Product.ProductName. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 48: Calibration Scale And Correct Axis Position
This illustration shows the positions of the calibration scales and marks on the robot. The number aside of the enlargement corresponds to the axis number. xx1500000526 Continues on next page Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 49
The table below specifies the exact axis positions in degrees. Axis IRB 14000 ROB_R IRB 14000 ROB_L 0° 0° -130° -130° 30° 30° 0° 0° 40° 40° 0° 0° -135° 135° Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 50: Updating Revolution Counters
Select Debug and tap PP to Main. Select Debug and tap Call Routine… Select CalHall. Go to Motor On and press the Start button. Continues on next page Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 51
Action In the calibration with hall sensors routine (CalHall), tap 2 to select the function of updating the revolution counters. xx1400002694 Continues on next page Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 52
Joints 1, 2, 3 and 4 are selectable in the first window. Tap Next to open the second window where joints 5, 6 and 7 are selectable. xx1400002695 xx1400002696 Continues on next page Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 53
Calibration order: axis 1-2-3-4-5-6-7. Note This procedure may take several minutes. xx1400002697 Continues on next page Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 54
4 Calibration 4.3 Updating revolution counters Continued Action When the sampling of hall sensors is finished, tap OK to confirm. xx1400002898 Continues on next page Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 55
(Calibration order: axis 1-2-3-4-5-6-7.) • The hall sensor is defect. Perform troubleshooting of I/O signals. Possible replacement of hall sensor may be required. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved. -
Page 56: Verifying The Calibration Position
Calibration scale and correct axis pos- axes align correctly. If they do not, then ition on page 48 Updating revolution update the revolution counters! counters on page Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 57: System Parameters
5 System parameters 5.1 Introduction About the system parameters This section describes the IRB 14000 specific system parameters. The parameters are divided into the topic and type they belong to. For information about other system parameters, see Technical reference manual — System parameters.
-
Page 58: Topic I/O System
Cfg name CollAvoidance Description This parameter is currently applicable only to IRB 14000 (YuMi robot). The action value Collision Avoidance is used to activate the Collision Avoidance functionality. By default this functionality is off in robots. Collision Avoidance monitors a detailed geometric model of the robot. If two bodies of the model come too close to each other, the controller warns about a predicted collision and stops the robot.
-
Page 59: Connection Timeout Multiplier
It is used together with RPI to calculate the timeout on connections. RPI multiplied by Connection Timeout Multiplier gives the maximum time before dropping the connection. Note For the IRB 14000 robot (YuMi) this parameter may have to be tuned depending on your network setup. Prerequisites The option EtherNet/IP Scanner/Adapter must be installed.
-
Page 60: Topic Motion
(for example robot-links) are considered to be in collision. Allowed values A value between 0.001 to 1 meter. Default value is 0.01 meter. Related information Collision Avoidance on page 58 Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 61: Global Speed Limit
The maximum value for the robot types are: Robot type Maximum value IRB 14000 1.5 m/s Allowed values A number between 0.1 and 20. The default value is 20. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 62: Arm Check Point Speed Limit
The maximum value for the robot types are: Robot type Maximum value IRB 14000 0.75 m/s Allowed values A number between 0.1 and 20. The default value is 0.75. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 63: Arm-Angle Definition
Arm-Angle Definition parameter is not supported in RW 6.07 or later versions. Allowed values New or Old. The default value is New. Related information Operating manual — IRB 14000 Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 64: Arm-Angle Reference Direction
Reference direction parallel with a line passing through axis 1 of the robot. The default value is 0. Related information Operating manual — IRB 14000 Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 65: Limit Avoidance Distance
A value between -1 to 100 radians. The default value is 0.017453 radians. Setting a negative value will disable the functionality. Related information Operating manual — IRB 14000 Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 66: Collision Detection Memory
Allowed values A value in the interval 0 to 0.5, specifying the movement in seconds. For the IRB 14000 robot the default value is 0 s and hence the robot does not back off. Setting the value to 0 s (disabling backing after collision) may leave the robot in a state with residual forces remaining after a collision.
-
Page 67: Friction Compensation Lead Through Factor
IRB 14000 Configuring this parameter in any other robot will not have any effect. Allowed values A value between 0.0 and 1.0. Default value is 0.6. Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 68
This page is intentionally left blank… -
Page 69: Index
31 EN IEC, 12 joystick directions, 29 EN ISO, 12 safety, 12 symbols lead-through, 36 safety, 20 load, 36 UAS, user authorization system, 46 Operating manual — IRB 14000 3HAC052986-001 Revision: E © Copyright 2015-2018 ABB. All rights reserved.
-
Page 72
Robotics and Motion No. 4528 Kangxin Highway PuDong District SHANGHAI 201319, China Telephone: +86 21 6105 6666 ABB Inc. Robotics and Motion 1250 Brown Road Auburn Hills, MI 48326 Telephone: +1 248 391 9000 abb.com/robotics © Copyright 2015-2018 ABB. All rights reserved.
ПЛАН-КОНСПЕКТ
проведения занятий с группой ШОМ____ПЧ28______________
Тема: «Изучение новых технологий пожаротушения и проведения аварийно-спасательных работ. Разработки и внедрение робото-технических комплексов (наземных, подводных и воздушных) в системе МЧС России».
ЗАНЯТИЕ 1, 2. Назначение, общее устройство, тактико – технические характеристики, особенности эксплуатации мобильного роботизированного комплекса разведки и пожаротушения МРК-РП, мобильной роботизированной установки пожаротушения МРУП-СП-Г-ТВ-У-40. Основные требования техники безопасности при работе с робото техническими средствами (РТС).
ДАТА:
ВРЕМЯ: 2 учебных часа
ЦЕЛИ ЗАНЯТИЯ:
Закрепление и обновление у обучаемых необходимых знаний о возможностях мобильного роботизированного комплекса разведки и пожаротушения МРК-РП, мобильной роботизированной установки пожаротушения МРУП-СП-Г-ТВ-У-40.
МЕСТО ПРОВЕДЕНИЯ: .
МЕТОД ПРОВЕДЕНИЯ: лекция, практически.
ОСНОВНЫЕ ДОКУМЕНТЫ И ЛИТЕРАТУРА, ИСПОЛЬЗУЕМЫЕ ПРИ РАЗРАБОТКЕ КОНСПЕКТА:
- Комплекс мобильный робототехнический; Руководство по эксплуатации НТ598.00.00.000 РЭ.
- АВТОМОБИЛЬ БЫСТРОГО РЕАГИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ МОБИЛЬНЫХ РОБОТИЗИРОВАННЫХ КОМПЛЕКСОВ (АБР-РОБОТ ТУ 4854-046-08578307-2006) Руководство по эксплуатации НТ599.00.00.000РЭ.
- ГОСТ Р 54 344-2011 Техника пожарная. МОБИЛЬНЫЕ РОБОТОТЕХНИЧЕСКИЕ КОМПЛЕКСЫ ДЛЯ ПРОВЕДЕНИЯ АВАРИЙНО-СПАСАТЕЛЬНЫХ РАБОТ И ПОЖАРОТУШЕНИЯ Классификация. Общие технические требования. Методы испытаний.
МАТЕРИАЛЬНО-ТЕХНИЧЕСКОЕ ОБЕСПЕЧЕНИЕ:
- видеопроектор – 1 ед.
— автомобиль быстрого реагирования АБР – РОБОТ – 1 ед.
— мобильный роботизированный комплекс разведки и пожаротушения МРК – РП – 1 ед.
1. Термины и определения – 5 минут.
робототехническое средство (РТС) — средство, которое выполняет функции, предписанные виды работ или операции без непосредственного участия человека в опасной зоне.
мобильный робот (МР) — дистанционно управляемое оператором самоходное робототехническое средство.
мобильный робототехнический комплекс (МРК) — совокупность мобильного робота, системы дистанционного управления и средств обеспечения эксплуатации робота.
2. Назначение, общее устройство, тактико – технические характеристики, особенности эксплуатации автомобиля быстрого реагирования АБР-РОБОТ(4326) – 25 минут.
Автомобиль быстрого реагирования для проведения аварийно-спасательных работ и пожаротушения в условиях повышенной опасности с использованием мобильного робототехнического комплекса легкого класса МРК-РП собран на шасси КАМАЗ-4326.
АБР-РОБОТ предназначен для:
— доставки мобильного робототехнического комплекса (МРК) и дополнительного оборудования к месту проведения аварийно-спасательных работ и пожаротушения;
— доставки персонала, способного, обслуживать и управлять робототехническим средством;
— доставки к месту выполнения работ расчета, пожарно-технического вооружения и запаса огнетушащих веществ;
АБР-РОБОТ соответствует климатическому исполнению УХЛ (эксплуатации при температуре воздуха от -40ºС до +40ºС), категории размещения 1 (для эксплуатации на открытом воздухе) эксплуатации в атмосфере типов 1 и 2 (условно чистой и промышленной) по ГОСТ15150 с размещением в период ожидания в помещении с температурой воздуха +5ºС.

Технические характеристики
| 1.2.1. Шасси – КАМАЗ-4326 | |
| 1.2.2. Колесная формула | 4 х 4 |
| 1.2.3. База, мм | 4200 |
| 1.2.4 Двигатель – КАМАЗ-740.31-240 (Евро-3) | |
| 1.2.4.1. Тип двигателя – дизельный с турбонаддувом | |
| 1.2.4.2. Мощность двигателя, кВт (л.с.) | 165(225) |
| 1.2.4.3. Частота вращения при номинальной мощности, мин -1 | 2200 |
| 1.2.5. Напряжение бортовой сети, В | 24 |
| 1.2.6. Тип колес | дисковые |
| 1.2.7. Тип шин – пневматические, с регулируемым давлением | |
| 1.2.8. Размер шин 425/85 R21 (1260[425-533Р) | |
| 1.2.9. Полная масса автомобиля, кг | 11600 |
| 1.2.10. Распределение нагрузки:
— на переднюю ось, кг — на заднюю ось, кг |
5600 6000 |
| 1.2.11. Углы свеса при полной нагрузке, град: | |
| передний – | 36 |
| задний – | 27 |
| 1.2.12. Дорожный просвет при полной нагрузке, мм – | 385 |
| 1.2.13. Максимальная скорость движения, не менее, км/ч | 90 |
| 1.2.14. Габаритные размеры, мм, не более: | |
| — длина | 7630 |
| — ширина | 2490 |
| — высота автомобиля | 3200 |
| Остальные технические характеристики см. в руководстве по эксплуатации изготовителя шасси. | |
| 1.2.15. Число мест боевого расчета | 2+3 |
| 1.2.16. Время подготовки к работе, ч, не более: | |
| — летом | 1 |
| — зимой | 1,5 |
| 1.2.17. Время свертывания, ч, не более | 2 |
Вывозимый пожарный инструмент и аварийно – спасательное оборудование
| № п/п | Наименование | Кол-во |
| 1. | Комплекс мобильный робототехнический легкого класса МРК-РП | 1 шт. |
| 2. | Установка пожаротушения тонкораспыленной водой УПТВ-300 с катушкой навесной и с рукавом высокого давления диаметром 17.4 мм на 50 м. | 1 компл. |
| 3. | Комплект дополнительного оборудования к МРК-РП в составе: | 1 компл. |
| — модуль порошкового пожаротушения вместимостью 50л | 2 шт. | |
| — модуль водопенного пожаротушения вместимостью 50 л. | 2 шт. | |
| — измеритель мощности дозы ИМД-21Б | 1 шт. | |
| — газосигнализатор ГСА-3 | 1 шт. | |
| 4. | ЗИП к МРК-РП в соответствии с ведомостью ЗИП | 1 компл. |
| 5. | Автомобильная УКВ радиостанция | 1 компл. |
| 6. | Носимая УКВ радиостанция | 2 шт. |
| 7. | Сигнальная громкоговорящая система | 1 шт. |
| 8. | Осветительный комплект | 1 шт. |
| 9. | ФОС с АЗУ | 1 шт. |
| 10. | Комплект аварийно-спасательного оборудования принятого в системе МЧС России в составе: | 1 компл. |
| — кусачки КГС-80 | 1 шт | |
| — ножницы комбинированные НКГС-80; | 1 шт. | |
| — расширитель средний РСГС-80; | 1 шт. | |
| — насосная станция СГС-1-80ДХМ; | 1 шт. | |
| — цилиндр двойного действия двухсторонний ЦГС-2/80; | 1 шт. | |
| — насос ручной НРС-2/80; | 1 шт. | |
| — катушка-удлинитель однорядная КУС-1/15 | 1 шт. | |
| 11. | Пеногенератор ГПВК | 1 компл. |
| 12. | Мотопомпа с возможностью водозабора от внешнего источника с производительностью 600 л/мин. | шт. |
| 13. | Огнетушитель ОУ-5 | 1 шт. |
| 14. | Огнетушитель ОП-5 | 2 шт. |
| 15. | Рукав пожарный напорный Dу =51 мм длиной 20 м | 5 шт. |
| 16. | Ствол ручной универсальный комбинированный | 1 шт. |
| 17. | Колонка КПА | 1 шт. |
| 18. | Теплоотражательный костюм ТК-800 | 3 шт. |
| 19. | Специальный костюм «РЗК» | 3 шт. |
| 20. | Специальный костюм «ТАСК-М» | 3 шт. |
| 21. | Дыхательный аппарат «Профи» | 5 шт. |
| 22. | Медицинская аптечка автомобильная | 1 шт. |
| 23. | Медицинская укладка | 1 шт. |
| 24. | Санитарные носилки облегченные | 1 шт. |
| 25. | Знак аварийной остановки | 1 шт. |
| 26. | Противооткатные упоры | 2 шт. |
| 27. | Лопата штыковая | 1 шт. |
| 28. | Кувалда | 1 шт. |
| 29. | Крюк для открывания люков | 1 шт. |
| 30. | Веревка | 1 шт. |
| 31. | Топор | 1 шт. |
| 32. | Лом пожарный с шаровой головкой | 1 шт. |
| 33. | Лом пожарный универсальный | 1 шт. |
| 34. | Трос буксировочный из стального каната грузоподъемностью 8-10 т. | 1 шт. |
| 35. | Канистра для бензина 5 л. | 1 шт. |
| 36. | Ножницы диэлектрические | 1 шт. |
| 37. | Перчатки диэлектрические | 1 пара |
| 38. | Боты диэлектрические | 1 пара |
| 39. | Коврик диэлектрический | 1 шт. |
| 40. | Зажим 80 | 1 шт. |
| 41. | ГП 50х70 | 1 шт. |
| 42. | ГП 50х80 | 1 шт. |
| 43. | ГП 70х80 | 1 шт. |
| 44. | Ключ К-80 | 1 шт. |
| 45. | Ключ К-150 | 1 шт. |
| 46. | Комплект шоферского инструмента | 1 компл. |
Устройство и работа АБР-РОБОТа и его составных частей
АБР-РОБОТ оборудован закрытой цельнометаллической однорядной 3-х местной кабиной (основная кабина) (поз.1) и однорядной 4-х местной дополнительной кабиной «салонного типа» (поз.2), где оборудовано рабочее место оператора МРК.
Основная кабина расположена над двигателем и для обеспечения доступа к нему опрокидывается вперед. Дополнительная кабина расположена непосредственно позади основной кабины и закреплена на надрамнике. Для облегчения опрокидывания основной кабины предусмотрено наличие гидравлического подъемника
На рабочем месте оператора МРК монтируется пульт управления мобильным роботом (МР).
Надстройка (поз.3) предназначена для доставки МР, различных приборов и пожарно-технического вооружения (далее ПТВ) к месту назначения.
Надстройка является конструкцией каркасного типа, установленной на подрамнике и закрепленной на нем с помощью металлорезиновых подушек.
Каркас надстройки, сварен из черного металла и обшит листом из алюминиевого сплава.
Цистерна (рисунок 2) предназначена для перевозки специальных растворов и воды, необходимой для тушения возгораний. Цистерна представляет собой сварную конструкцию из стали со специальным покрытием.
Для наполнения цистерны водой от внешнего источника предназначена горловина с гайкой ГМ50 (поз. 3).
Опорожнение цистерны производится посредством электрического насоса (поз. 2), который подключается к розетке 24В с выключателем (поз. 5).
Для определения уровня содержимого цистерны используется флюдометр (поз. 1), показания которого отображаются на индикаторе (поз. 4).
Из крышки цистерны выходит труба перелива (поз. 6).


Р исунок 2


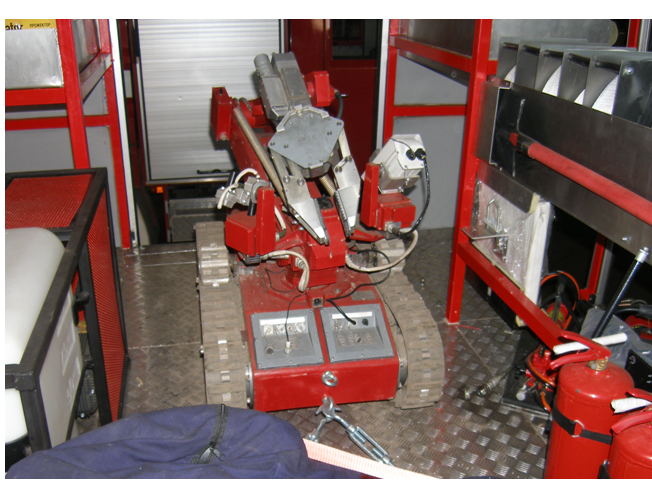

Для погрузки (выгрузки) МР предназначен выдвижной трап (рисунок 12).
Для аварийной загрузки МР в настройке устанавливается ручная лебедка.
на крыше автомобиля размещены:
-трос буксировочный ;
-пеногенератор ГПВК;
— проблесковые маяки.
На дополнительной кабине снаружи (рисунок 13) смонтирована выдвижная стойка поз 1. для крепления антенн и коммутационная коробка поз. 2 с разъемами для подключения антенн.
3. Мобильный роботизированный комплекс разведки и пожаротушения МРК-РП
Назначение МРК
Мобильный робототехнический комплекс разведки и пожаротушения (далее МРК), предназначен для применения при ликвидации последствий аварий, отягощенных химическим и радиационным загрязнением, сопряженных с рисками гибели и травматизма личного состава.
Технические характеристики
| Масса снаряженного МР, не более кг | 190 |
| Максимальная скорость передвижения МР, не менее, км/ч | 3,0 |
| Высота преодолеваемого МР порогового препятствия, м | 0.25 |
| Допустимый угол крена, дифферента МР, не более, градус | 35 |
| Глубина преодолеваемой МР водной преграды, не более, м | 0.1 |
| Глубина преодолеваемого МР снежного покрова, не более, м | 0.1 |
| Номинальная грузоподъемность манипулятора, кг | 30 |
| Предельно допустимая грузоподъемность манипулятора, кг | 50 |
Управление МР с ПУ на расстоянии:
|
200
1000 |
| Габаритные размеры МР, не более, м | |
| Длина | 1.35 |
| Ширина | 0.65 |
| Высота | 0.7 |
| Время непрерывной работы, ч, не менее | 4 |
К основным задачам, которые выполняет МРК-РП, относятся:
-
подача в очаг возгорания огнетушащего вещества от водопенного или порошкового модуля пожаротушения;
-
подача в очаг возгорания тонкораспыленной воды от
АБР-РОБОТ через 50-ти метровую катушку по рукаву высокого давления; -
подача в очаг возгорания воздушно-механической пены низкой кратности от АБР-РОБОТ через 50-ти метровую катушку по рукаву высокого давления или пены высокой кратности через пожарный рукав с использованием генератора пены высокой кратности (ГВП), закрепленного на манипуляторе МРК-РП;
-
проведение аварийно-спасательных работ с применением манипулятора, механического схвата и комплекта сменных губок;
-
проведение разведки в труднодоступных местах с преодолением препятствий (лестничные марши, коридоры, проемы и др.)
Устройство МРК
Мобильный робототехнический комплекс представляет собой набор механизмов, устройств и приспособлений, предназначенных для выполнения оперативно-тактических задач.
Основным элементом МРК является мобильный робот (МР), общий вид которого представлен на рисунке 1. МР представляет собой транспортное средство (поз. 1), внутри корпуса которого размещены: отсек управления с блоками системы управления, бортовая часть канала связи (закрыт крышкой поз. 2) и система энергообеспечения — отсек аккумуляторный (закрыт крышкой поз. 3). На корпусе транспортного средства монтируется манипулятор (поз. 4) и сменное технологическое оборудование, подключаемое к МР на панелях управления (поз. 5).
МР оснащен телевизионной системой, системой освещения и каналом акустической связи.
Все исполнительные механизмы – электромеханического типа с двигателями постоянного тока.
МР управляется в командном режиме с поста дистанционного управления (рисунок 15).
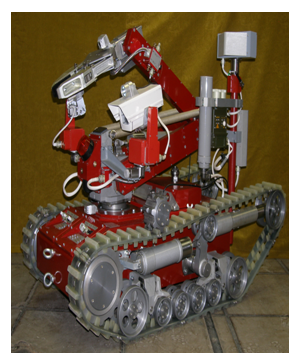
Система дистанционного управления (далее – СДУ) предназначена для дистанционного управления исполнительными механизмами и устройствами, входящими в состав МРК. Управление МР осуществляется по радиоканалу или кабелю в зависимости от условий работы.
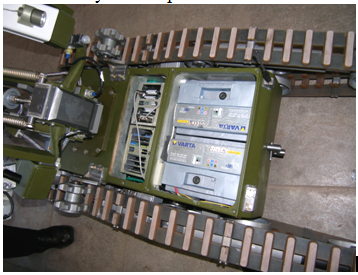
Конструктивно СДУ делится на пультовую и бортовую части.
Пультовая часть СДУ, расположенная в ПУ, предназначена для задания команд управления, формирования командных посылок и преобразования их в код, удобный для передачи по кабелю и радиолинии. Задание команд управления осуществляется с помощью ручек управления, переключателей и кнопок, расположенных на панели управления.
Бортовая часть СДУ, расположенная в корпусе транспортного средства МР, предназначена для приема сигналов управления, поступающих, в зависимости от режима работы, по радиолинии или по кабелю, их обработки, усилению и распределению по соответствующим исполнительным устройствам и механизмам.
Для работы в условиях сложных для прохождения радиоволн (работа в зоне радиотени или работа с постановщиком радиопомех) СДУ снабжена бортовой катушкой с кабелем дистанционного управления, которая устанавливается на стойке в задней части МР (рисунок 12).
Для визуального контроля за работой МР МРК оснащен телевизионной системой.
Телевизионная система
Телевизионная система включает в себя:
— две обзорные телеустановки (ОТУ1, ОТУ2), выполняющие функции наблюдения за окружающей обстановкой;
— одну курсовую ТВ-камеру (ТК5), выполняющую функции наблюдения за дорогой в непосредственной близости от мобильного робота и положением гусениц по отношению к проезжей части дороги и их состоянием;
— одну прицельную ТВ-камеру (ТК3), позволяющую вести наблюдение за работой схвата и наведением рабочего инструмента на исследуемые предметы.
Все обзорные ТВ-камеры (ТК1, ТК2, ТК6), входящие в телеустановки ОТУ1 и ОТУ2,– цветные с широкоугольным объективом. Одна обзорная камера (ТК1) снабжена трансфокатором, позволяющим производить приближение (увеличение) изображения.
Обзорные ТВ-камеры (ТК1, ТК2, ТК6) установлены на двухстепенные механизмы наведения, позволяющие вести практически круговое наблюдение. Механизмы наведения ОТУ1 и ОТУ2 одинаковые, обеспечивают плавное пропорциональное (в зависимости от угла отклонения джойстика на пульте управления) изменение скорости наведения ТВ-камер – в вертикальной и горизонтальной плоскостях.
Максимальная скорость наведения ТВ-камер (ТК1, ТК2, ТК6) по горизонту и вертикали составляет 10º/с.
Курсовая ТВ-камера (ТК5) – цветная с широкоугольным объективом без трансфокатора, жестко установлена в передней части мобильного робота.
Прицельная ТВ-камера (ТК3)– черно-белого изображения без трансфокатора, жестко установлена на кисти мобильного робота.
Управление телевизионной системой осуществляется дистанционно с ПУ, а визуальная информация о работе МР отображается на мониторе ПУ.
В качестве автономного источника питания (АИП-1) для МР применяются два автомобильных аккумулятора напряжением 12 В и емкостью 72 А/ч каждый, расположенные в МР (поз. 1, рисунок 2). АИП-1 предназначены для обеспечения работы ходовых двигателей МР, исполнительных механизмов и электронных блоков бортовой части СДУ, ТВ-системы МР.
АИП-1 обеспечивают непрерывную работу МР в течение 4-х часов.
Длительность непрерывной работы зависит от циклограммы выполнения работ МРК. Наиболее энергоемкими являются передвижения МР, особенно с частым маневрированием и движением в гору.
Работа МРК
Работу МР и ПУ, рассмотрим по функциональной схеме (рисунок 3).
Управление МР осуществляет оператор с ПУ поста дистанционного управления. Возможно управление, как по кабельной линии связи, так и по радио. Режим управления – командный.
Команды управления задаются оператором на ПУ ПДУ путем нажатия на соответствующие ручки, тумблеры, кнопки и переключатели на панели управления.
Сигналы пропорционального управления поступают в канал управления пульта на аналого-цифровой преобразователь, который преобразует их в цифровой код.
Команды дискретного управления поступают на микропроцессорный модуль пультовой части канала дистанционного управления, который формирует командные посылки в цифровом виде, удобном для передачи по кабельной линии связи и по радио.
В зависимости от режима работы МРК «Радио» или «Кабель» цифровой сигнал управления поступает на радиопередатчик канала дистанционного управления (радиомодем) или в кабельный канал связи соответственно.
В зависимости от режима работы «Радио» или «Кабель» на микропроцессор бортовой части канала дистанционного управления поступают цифровые сигналы управления от радио приемника или с примника-передатчика по витой паре. Сигналы управления, прежде чем поступить на соответствующие объекты управления (двигатели транспортного средства, манипулятор, фары, коммутатор телевизионных сигналов, дополнительное оборудование), поступают на блоки управления по шине CAN, где происходит соответствующее усиление сигналов по напряжению и по току.
Необходимую информацию для выполнения работ оператор получает с помощью телевизионной системы, канала акустической связи и дополнительно устанавливаемых на борту МР датчиков (в комплект МРК не входят). Видеоизображение в виде электрического видеосигнала от пяти телекамер поступает на коммутатор телевизионных сигналов, расположенный в блоке управления телевидением бортовой части СДУ. С коммутатора сигнал от выбранной камеры поступает или на передатчик телевизионных сигналов или на передатчик по витой паре (при работе МРК по кабелю).
Движение МР осуществляется моторами-звездочками, приводящими в движение гусеницы. Для повышения проходимости и маневренности предусмотрено изменение геометрии гусеничных обводов транспортного средства. Изменяя направление вращения моторов-звездочек, можно менять направление движения МР.
Погрузочно-разгрузочные работы осуществляются манипулятором, имеющим пять ориентирующих степеней подвижности: вращение относительно вертикальной оси, подъем плеча, качание предплечья и конечного звена, ротация схвата. Каждое движение осуществляется с помощью отдельных электромеханизмов.
Мобильный робот
МР представляет собой самоходное, управляемое дистанционно, гусеничное транспортное средство с манипулятором, бортовой частью системы управления и телевизионной системой, оснащаемое дополнительным сменным оборудованием, состав которого меняется в зависимости от выполняемой задачи.
Управление МР осуществляется по кабелю или по радио.
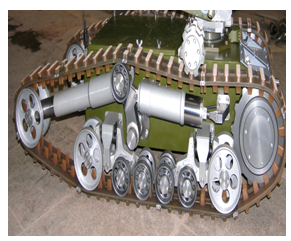

При вращении моторов-звездочек обоих бортов в одном направлении МР совершает прямолинейное движение.
При вращении моторов-звездочек левого и правого бортов в разных направлениях происходит поворот МР на месте. При повороте направо (налево) правая (левая) гусеница движется назад, левая (правая) – вперед.
При прекращении движения МР происходит динамическое торможение электродвигателей моторов-звездочек.
Манипулятор
Манипулятор состоит из опорно-поворотного устройства (поз. 1), плеча (поз. 2), предплечья (поз. 3) и кисти (поз. 4).

Кисть (рисунок 12) состоит из схвата (поз. 3) , механизма ротации (поз. 1) и механизма сжатия-раскрытия губок схвата (поз. 2). Угол вращения схвата не ограничен.
Манипулятор имеет токоподвод для подключения телекамер и исполнительных устройств, устанавливаемых на (в) схвате, а в конструкции кисти установлено вращающееся контактное устройство с восьмью контактными кольцами.
Манипулятор имеет пять ориентирующих степеней подвижности:
— поворот манипулятора вокруг вертикальной оси;
— качание плеча;
— качание предплечья;
— качание кисти;
— ротация схвата.
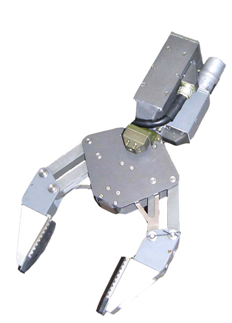
Комплект сменных губок схвата
Комплект сменных губок схвата предназначен для обеспечения надежного захвата предметов различной формы и размеров.
Комплект сменных губок схвата состоит из:
а) плоских прямых губок, установленных штатно на кисти манипулятора для захвата рабочего оборудования и плоских предметов;
б) узких удлиненных губок для захвата мелких предметов, расположенных в щелях шириной 20 мм и более, глубиной до 200 мм и отверстиях диаметром 40 мм и более;
в) губок типа грейфер с диаметром внутренней полости 160 мм;
г) губок для захвата цилиндрических предметов диаметром от 50 до 200 мм
Основой комплекта являются губки схвата прямые с колодкой, которые состоят из колодки с фиксатором и прямых губок. Все губки комплекта имеют унифицированное посадочное место. Выбранный комплект губок вставляется в посадочное место и фиксируется в выбранном положении
Дистанционное управление осуществляется с пульта по радиоканалу или по кабельной линии управления.
Дальность работы составляет, м:
— по радиоканалу до 1000;
— по кабелю до 200.
СДУ защищена от влияния непреднамеренных помех промышленного и атмосферного характера, а также помех, вызываемых работой элементов МРК.
Бортовая часть СДУ выполняет следующие задачи:
— прием управляющих команд по радиоканалу и по кабелю;
— передачу ТВ-изображений с телекамер и телеметрии по радиоканалу и по кабелю;
— управление скоростью движения и поворота МР;
— пропорциональное управление двухстепенным устройством наведения ТВ- камер обзора;
— управление пятью приводами МП;
— включение-выключение телевизионных камер;
— пропорциональное регулирование усилия сжатия схвата;
— включение-выключение осветителей;
— включение-выключение светового маяка и звукового сигнала;
— отработку команд по управлению объективом-трансфокатором;
— отработку команд по переходу управления с «Радио» на «Кабель»;
— отработку команд по приведению в действие дополнительного оборудования;
— передачу по каналу телеметрии информации о состоянии боевой цепи срабатывания спецсредств, величине зарядки бортовых аккумуляторов, углах крена и дифферента, данных с приборов разведки;
— выдачу команд приведения в действие систем пожаротушения и охлаждения МР.
В случаях, когда управление по радиоканалу затруднено или невозможно в результате действия внешних электромагнитных возмущающих факторов, используется кабельное управление МР при помощи катушки кабельной линии управления (далее – КЛУ). КЛУ обеспечивает передачу команд управления с ПУ на борт МР, передачу команд приведения в действие спецсредств и приём ТВ-сигналов с борта МР на ПУ.
КЛУ обеспечивает размещение и свободное наматывание и сматывание кабеля управления длиной до 200 метров.
Пульт управления.
Пульт управления предназначен для формирования команд дистанционного управления мобильным роботом, получения телевизионного сигнала от телекамер и отображения телеметрической информации, поступающей с мобильного робота.
Формирование команд осуществляется с помощью органов управления панели пульта.
Управление работой робототехнического комплекса осуществляется по кабелю или по эфиру.
Пульт управления осуществляет управление навесным оборудованием и обрабатывет и отображает сигналы телеметрии от мобильного робота.
Сигналы телеметрии робототехнического комплекса отображаются на дисплее панели управления и имеют как графическое, так и цифровое отображение.
На дисплей панели управления выводится схема робототехнического комплекса с телеметрическими данными о состояния различных устройств и механизмов робототехнического комплекса и состояние активных органов управления.
Панель управления формирует команды управления:
— определяет режим работы пульта управления – радио или кабель;
— выбирает активное звено (манипулятор) робототехнического комплекса;
— выбирает активную телекамеру робототехнического комплекса;
— осуществляет пропорциональное управление скоростью звеньев робототехнического комплекса и движением;
— формирует дискретные команды управления для навесного оборудования робототехнического комплекса;
— формирует команды управления транспортным средством.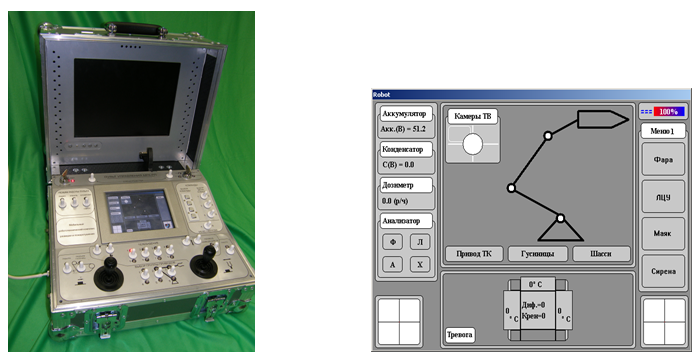
Формирование команд управления МР производится органами управления с использованием тумблеров, кнопок и джойстиков.
Панель пульта разбита на функциональные зоны управления:
— режим работы пульта;
— телевидение;
— выбор группы приводов;
— выбор команд;
— выбор меню команд.
Каждая зона управления формирует соответствующие команды управления.
Применение АБР-РОБОТ и МРК-РП при ликвидации возможных
пожаров (загораний) и аварийных ситуаций на охраняемых объектах
ОАО «Уральский электрохимический комбинат»
- Проведение разведки места пожара (аварии) при помощи телевизионных систем, приборов радиационной и химической разведки МРК-РП.
- Осаждение газообразного облака гексафторида урана (ГФУ) в случае выброса на конденсационно-испарительных участках (КИУ) подразделений основного производства при помощи установки пожаротушения тонкораспылённой водой УПТВ-300 и МРК-РП.
- Тушение загораний на ядерноопасных участках подразделений основного производства и закрытых распределительных устройствах энергообъектов при помощи МРК-РП с модулем порошкового пожаротушения.
- Тушение загораний на ядерноопасных участках подразделений основного производства и закрытых распределительных устройствах энергообъектов при помощи МРК-РП с присоединённой рабочей рукавной линией диаметром 38 мм (51 мм) с ручным универсальным стволом для подачи «сухой» компрессионной пены, подаваемой от автомобиля пожарного специального тушения NATISK.
- Проведение развёртывания сил и средств в условиях возможного взрыва технологических аппаратов (установок), например: транспортировка и установка на позиции переносного лафетного универсального пожарного ствола АКРОН «Mercury-Master 1000тм» массой 10,5 кг, прокладка магистральной рукавной линии и её присоединение к лафетному стволу.
Указание мер безопасности
К работе с МРК допускаются только обслуживающий персонал, прошедший подготовку в специальном учебном центре и имеющий удостоверение на право управления и работы с МРК и прошедший инструктаж по технике безопасности.
В целях надежной работы изделия и безопасности обслуживающего персонала необходимо соблюдать общие правила техники безопасности, установленные на месте эксплуатации изделия. Применять изделие допускается только в соответствии с назначением, указанным в РЭ.
При работе с использованием дополнительного оборудования не входящего в состав МРК необходимо соблюдать требования безопасности, изложенные в руководствах по их эксплуатации на это оборудование.
Необходимо соблюдать осторожность при работе с зарядным устройством, входящим с состав изделия, так как используется входное напряжение 220 В с частотой 50 Гц. Во избежание несчастных случаев требуется соблюдение общих мер безопасности от поражения обслуживающего персонала электрическим током.
Запрещается применять в зарядном устройстве предохранители изготовленные из проводников диаметром больше допустимого для каждого типа ЗУ. Перед заменой предохранителя в ЗУ не забудьте вынуть вилку из розетки электросети.
Во время зарядки АИП запрещается вскрывать изделие, производить ремонтные и профилактические работы, а также проверять работоспособность изделия.
При проверке функционирования МРК запрещается находиться ближедвух метров к МР, проверять качество стыковки соединителей при включенных приводах.
Изделие не представляет опасности для жизни и здоровья человека и окружающей среды при соблюдении правил эксплуатации, хранения и транспортирования, изложенных в РЭ.
Внимание! При зарядке аккумуляторов возможно образование взрывоопасной смеси. Зарядку проводить в хорошо проветриваемом помещении. Зарядку аккумуляторов МР проводить только при снятой крышке аккумуляторного отсека.
3.4.2.4. Работа с установкой пожаротушения тонкораспыленной водой
Для проведения работ с использованием установки пожаротушения тонкораспыленной водой УПТВ-50, катушка с рукавом высокого давления навешивается на МР (поз. 1, (рисунок 29), распылитель поз. 1 (рисунок 30) устанавливается на звене манипулятора и они подключаются к клапанной коробке поз. 3 (рисунок 29). Клапанная коробка подключается к разъему поз. 4.

Рисунок 29
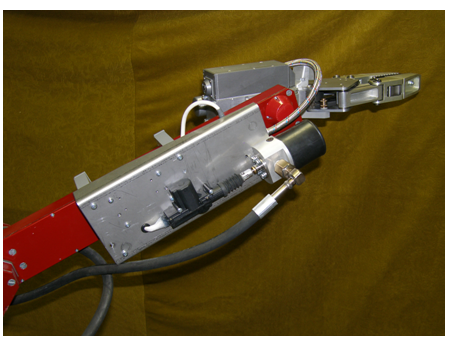
Рисунок 30
Укладка шланга по манипулятору показана на рисунке 31.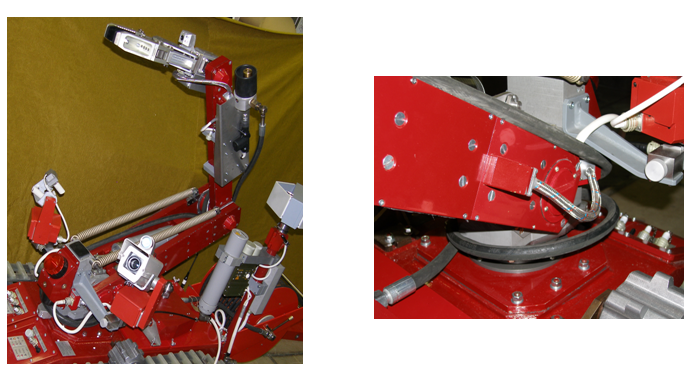
Рисунок 31
Порядок работы с УПТВ-50 в ее руководстве по эксплуатации.
Для включения подачи воды на ПУ тумблером «ВЫБОР МЕНЮ КОМАНД» выбрать «3», в графическом окне монитора панели управления ПУ отобразятся команды «Меню 3».
Нажать кнопку напротив команды «Подача воды». Визуально наблюдать исполнение команды на МР. Управляю манипулятором направить струю на объект. Для изменения распыла струи нажать кнопку напротив команды «Компактная струя». Для отмены команд повторно нажать соответствующие кнопки.
Для охлаждения МР на клапанной коробке установлен распылитель (поз. 2 рисунок 29). Для включения режима охлаждения МР необходимо тумблером «ВЫБОР МЕНЮ КОМАНД» выбрать «2» и нажать кнопку напротив команды «Орошение». Визуально наблюдать исполнение команды на МР.
3.4.2.5. Работа с модулем водопенного пожаротушения
Порядок заправки водопенного модуля согласно инструкции по его эксплуатации. Модуль навешивается на МР (рисунок 32). Подключение модуля и работа с ним в составе МР согласно п. 3.4.2.4.
Рисунок 32
3.4.2.6. Работа с модулем порошкового пожаротушения
Порядок заправки порошкового модуля и соблюдения правил техники безопасности согласно инструкции по его эксплуатации. Модуль навешивается на МР (рисунок 33). Пиропатрон подключается кабелем к разъему «Оружие» (рисунок 27).

Рисунок 33
Внимание ! Подключение проводить строго в следующей последовательности:
— свободные концы кабеля скруткой подключить к пиропатрону;
— при выключенном МР и выключенном тумблере (в нижнем положении) (поз. 10, рисунок 27) подключить кабель к разъему «Оружие»;
— включить МР;
— перевести тумблер в верхнее положение «I».
Для активации порошкового модуля необходимо на ПУ повернуть ключ «СПЕЦСРЕДСТВА» в положение «С2». Начнется зарядка боевых конденсаторов. Процесс зарядки контролировать по показаниям окна «Конденсаторы» (поз. 2, рисунок 20). При достижении значения зарядки 19…20В боевая цепь готова к работе. Нажатием двух тумблеров «ПУСК» (поз. 2 и 4, рисунок 21) инициировать порошковый модуль. Перед активацией МР повернуть в сторону объекта.
Вместо распылителя (поз. 1, рисунок 33) может устанавливаться успокоитель в схвате манипулятора и с помощью шланга подключаться к порошковому модулю. В зависимости от применяемого типа распылителя («елочка» или успокоитель) применяются различные марки порошков.
3.4.2.7. Работа с пеногенератором
Пеногенератор ГПВК устанавливается в схвате манипулятора (поз.1, рисунок 34).
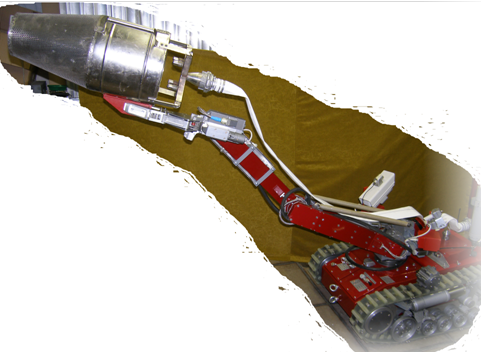
Рисунок 34
С помощью шланга подключается к фланцу переходнику, закрепленном на МР (рисунок 35).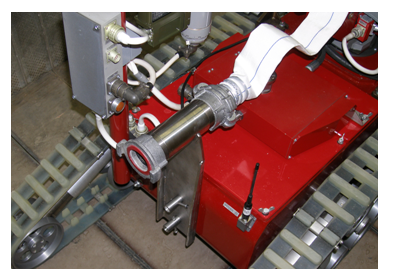
Рисунок 35
Подача раствора пенообразователя на пеногенератор осуществляется от внешнего источника по рукавной линии. В качестве внешнего источника может использоваться пожарный автомобиль, оснащенный пенно-баком и системой дозирования пенообразователя. Рабочее давление на пеногенераторе должно быть в диапазоне 4÷8 атм. при расходе 1л/с. Применяемый пенообразователь по своим характеристикам обеспечивает получение высокократной пены (более 200).
Направление подачи струи пены производится с помощью команд подаваемых на исполнительные механизмы манипулятора.
перейти к содержанию
![]()
VEX ROBOTICS 280-7125 EXP Мозг робота

ИНСТРУКЦИЯ ПО

- Жидкокристаллический дисплей с подсветкой
- Кнопка проверки
- (8x)3-проводной порт
- кнопка
- (10x) Смарт-порт
- Левая и правая кнопки
- Монтаж конструкции
- Слот для батареи
- Динамик
- Порт USB
- Слот MicroSD
Чтобы включить Robot Brain. Нажмите кнопку проверки. Чтобы отключить Robot Brain, нажмите кнопку X.
ПОЖАЛУЙСТА, СОХРАНИТЕ ЭТИ ИНСТРУКЦИИ
Чтобы установить аккумулятор робота:
(280-7126 продается отдельно) Вставьте аккумулятор робота в мозг робота.
Чтобы удалить аккумулятор робота:
Нажмите защелку аккумулятора и вытащите аккумулятор.
Для сопряжения Robot Brain и контроллера 280-7729:
- В Robot Brain перейдите в «Настройки».
- Перейдите к «Парному контроллеру».
- Следуйте инструкциям на экране для сопряжения


ЗАЯВЛЕНИЕ FCC
Это оборудование было протестировано и признано соответствующим ограничениям для цифровых устройств класса B в соответствии с частью 15 правил FCC. эти ограничения предназначены для обеспечения разумной защиты от вредных помех при установке в жилых помещениях. Это оборудование генерирует, использует и может излучать радиочастотную энергию и, если оно не установлено и не используется в соответствии с инструкциями, может создавать вредные помехи для радиосвязи. Однако нет гарантии, что помехи не возникнут в конкретной установке. Если это оборудование создает вредные помехи для радио- или телевизионного приема, это можно определить, выключив и снова включив оборудование. пользователю рекомендуется попытаться устранить помехи одним или несколькими из следующих способов.
- Изменить ориентацию или местоположение приемной антенны.
- Увеличьте расстояние между оборудованием и приемником.
- Подключить оборудование к розетке в цепи, отличной от той, к которой подключен приемник.
- Обратитесь за помощью к дилеру или опытному радио / телевизионному технику.
- Для обеспечения безопасности с данным устройством необходимо использовать экранированные кабели. соответствие классу BECClimits.
Внимание! Изменения или модификации этого устройства, не одобренные в явной форме стороной, ответственной за соответствие, могут лишить пользователя права на эксплуатацию оборудования.
Заявление FCC: Данное устройство соответствует части 5 Правил FCC. Работа устройства зависит от следующих двух условий: (1) Это устройство не должно вызывать вредных помех, и (2) это устройство должно принимать любые получаемые помехи, включая помехи, которые могут вызывать сбои в работе.
Документы / Ресурсы