Робот на Lego EV3 для соревнований Шорт-трект

- Скачать инструкцию в формате pdf
Подключение датчиков и электромоторов
- Левый датчик света подключается в порт 2
- Правый датчик света подключается в порт 3
- Датчик ультразвука подключается в порт 4
- Левый электромотор подключается в порт B
- Правый электромотор подключается в порт С
Программа для робота
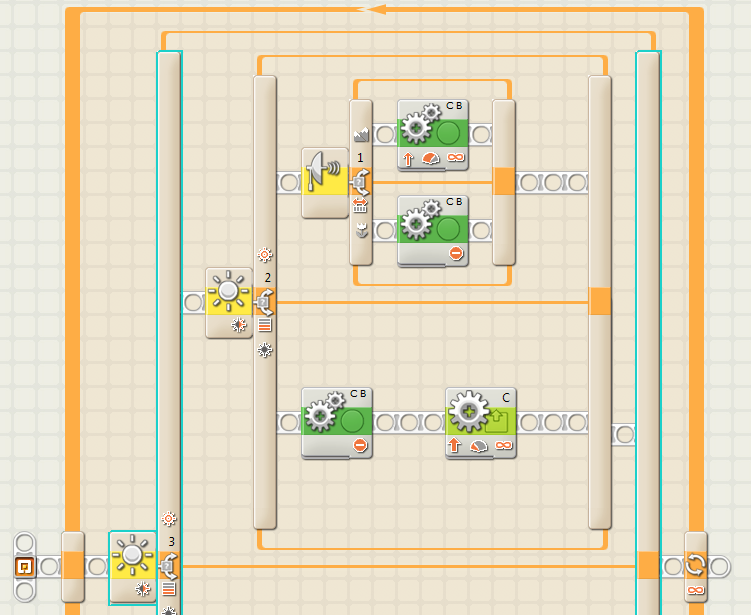
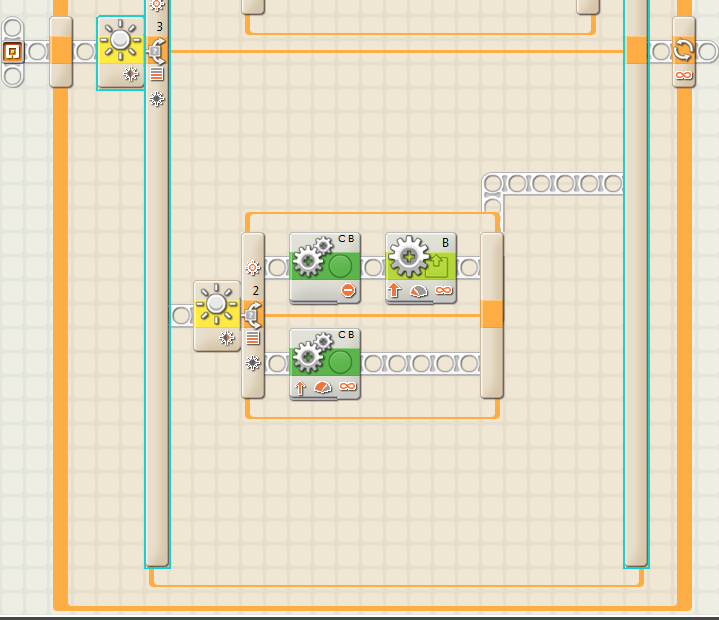
В программе используется ПД регулятор для движения робота по черной линии.
Основная настройка программы идет в качестве подбора коэффициентов которые в программе обозначены именами k — основная переменная для реагирования робота на изменение черной линии, переменная d это дифференциальная составляющая отвечает за проверку выравнивание робота на черной линии.
Если робот слишком глубоко заехал на черную линию коэффициент d увеличит усиливающие значение для моторов и робот быстрее вернется на белую область.
Движение по черной линии с автоматической остановкой перед впереди едущим роботом

- Скачать программу для робота среда EV3 Сlassroom
Движение по черной линии

- Скачать программу для робота среда Lego EV3 MINDSTORMS
Движение по черной линии с автоматической остановкой перед впереди едущим роботом

- Скачать программу для робота среда Lego EV3 MINDSTORMS + реакция на датчик ультразвука
На главную Главная
Автор: Ковязин Владимир Анатольевич
Учебное заведение: МБОУ ДО Дом детского творчества
Краткое описание работы: Конструирование и программирование восьминогих роботов-шагоходов для участия в соревнованиях шорт-трек
Дата публикации: 2021-02-20
Загрузка…
Методическая разработка открытого занятия
«Гонки восьминогих шагоходов на Шорт-Треке»
Направление: «Современный урок и внеурочная деятельность»
Ковязин Владимир Анатольевич,
Педагог дополнительного образования
Муниципальное бюджетное образовательное учреждение дополнительного образования детей
Страна: Россия
629300 ЯНАО г. Новый Уренгой
ул. Молодежная, 17-А
E-mail: kovyazin.70@mail.ru
т: 89124307079
Цели:
- проектирование и конструирование;
- поиск альтернативных творческих решений;
- развитие пространственных и математических представлений в процессе конструирования.
Задачи:
- образовательная: формировать умения и навыки проектирования и конструирования;
- развивающая: развивать конструкторские навыки, творческое воображение;
- воспитательная: воспитывать трудолюбие и стремление добиваться выполнения поставленной задачи.
Оборудование: ПК, конструктор Lego Mindstorms EV3, поле для Шорт-Трека.
Ход занятия
- Организационный момент.
- Повторение.
Блиц опрос.
1) Какие виды штифтов различают в конструкторе Lego Mindstorms EV3?
2) Какие виды втулок различают в конструкторе Lego Mindstorms EV3?
3) Какие виды механических передач вы знаете?
4) Какие штифты нужно использовать при сборке ходовой у шагоходов и почему?
5) Как правильно подключить к портам датчики и моторы в конструкторе Lego Mindstorms EV3?
6) Как перезагрузить модуль EV3?
- Знакомство с регламентом соревнований.
- Поле для Шорт-Трека. Количество заездов и участников.

Поле состоит из 2-х соединенных и пересекаемых путей, разделенных линией старта-финиша.
Количество заездов определяется судьёй. В одном заезде одновременно участвуют 2 робота. Роботов ставят перед линией старта-финиша и запускают по сигналу судьи в направлении по часовой стрелке.
- Требования к роботам.

Размеры робота не должны превышать по высоте, ширине и длине: 210 мм.
Конструкция робота должна быть прочной.
3) Программа для Шорт-Трека.
Программа представляет собой конструкцию цикл в цикле.

Внутренний цикл позволяет двигаться роботу по черной линии с помощью 2 датчиков цвета и при обнаружении (с помощью ультразвукового датчика) спереди робота на расстоянии менее, или равно 15 см останавливаться. Внешний цикл бесконечно повторяет этот процесс.
Подходящую скорость движения робота можно настроить, регулируя мощность моторов (В+С), во внутреннем цикле.
- Подготовка роботов и пробные заезды.
Перед заездом необходимо проверять и укреплять ходовую часть робота (обычно подправляют вылезающие штифты). Пробные заезды необходимы, чтобы проверить, настроен ли робот на оптимальную скорость движения по чёрной линии. Как правило, на это отводится (10 -12) минут.
- Проведение соревнований.

Соревнования проводятся под руководством судьи. Определение участников для первого заезда выполняется жеребьевкой. Длина заезда — 1 полный круг. Побеждает робот, который быстрее пройдёт свой круг. Если робот сходит с чёрной линии, или мешает сопернику пройти перекрёсток, то он дисквалифицируется.
VI. Подведение итогов.
1) Награждение победителей;
2) Просмотр и сравнение собранных конструкций;
3) Рекомендации к собранным конструкциям.
Просмотреть свитедельство о публикации
Муниципальное бюджетное общеобразовательное учреждение
«Ахматовская средняя общеобразовательная школа»
«Первый шаг в науку — 2017»
Секция естественнонаучного направления
РОБОТ, ДВИГАЮЩИЙСЯ ПО ЧЁРНОЙ ЛИНИИ
Творческий проект
Авторы проекта: Чирков Алексей Евгеньевич, ученик 6 класса МБОУ «Ахматовская СОШ».
Федоров Илья Юрьевич, ученик МБОУ «Ахматовская СОШ».
Руководитель проекта: учитель математики и информатики МБОУ «Ахматовская СОШ» Кашкин Александр Валерьевич
с. Ахматово 2017
Введение Обоснование выбора темы
Появление в школе комплектов Робототехники LEGO Mindstorms NXT нас очень заинтересовало. Это не просто детская игра, а целая наука, объединяющая в себя физику, математику, информатику, английский. Мы решили изучить данную науку, чтобы воплощать в роботах свои фантазии. Активно участвовать в муниципальных и республиканских соревнованиях по робототехнике.
Актуальность
Робототехника быстро становится неотъемлемой частью учебного процесса, она легко вписывается в школьную программу обучения по техническим предметам. Ключевые опыты в физике и математике можно наглядно показать с помощью LEGO роботов.
Робототехника поощряет мыслить творчески, анализировать ситуацию и применять критическое мышление для решения реальных проблем. Работа в команде и сотрудничество укрепляет коллектив, а соперничество на соревнованиях дает стимул к учебе. Возможность делать и исправлять ошибки в работе самостоятельно заставляет школьников находить решения без потери уважения среди сверстников. Робот не ставит оценок и не дает домашних заданий, но заставляет работать умственно и постоянно.
Различные языки программирования графическими элементами помогают школьникам мыслить логически и рассматривать вариантность действия робота. Обработка информации с помощью датчиков и настройка датчиков дают школьникам представление о различных вариантах понимания и восприятия мира живыми системами.
Цель проекта:
Создание робота для соревнований «Шорт-трек» на республиканском этапе по робототехнике «РобоФест-2017» в г. Чебоксары для младших школьников (9-11 лет).
Задачи проекта:
-
познакомиться с конструктором LEGO NXT
-
изучить основы программирования в среде LEGO MINDSTORMS NXT 2.0
-
сконструировать модель робота
-
создать программу для управления роботом
-
испытать полученного робота
Предмет исследования:
конструктор со средой программирования LEGO MINDSTORMS NXT.
Гипотеза:
робототехника позволяет воплощать в роботах свои фантазии.
Ожидаемые результаты
-
умение программировать в среде LEGO MINDSTORMS NXT 2.0,
-
умение конструировать различные модели роботов,
-
заинтересованность обучающихся школы в изучении Робототехники.
Методы реализации проекта:
1. Объяснительно-иллюстративный – предъявление информации различными способами (объяснение, рассказ, беседа, инструктаж, демонстрация, работа с литературой и др);
2. Эвристический – метод творческой деятельности (создание творческих моделей и т.д.);
3. Проблемный – постановка проблемы и самостоятельный поиск её решения;
4. Программированный – набор операций, которые необходимо выполнить в ходе выполнения практических работ (компьютерный практикум);
5. Репродуктивный – воспроизводство знаний и способов деятельности (собирание моделей и конструкций по образцу, упражнения по аналогу);
6. Частично-поисковый – решение проблемных задач с помощью педагога;
7. Поисковый – самостоятельное решение проблем.
Материальные ресурсы:
-
конструктор с программным обеспечением Lego Mindstorms NXT – 2 набора,
-
АРМ ученика и учителя (компьютер, проектор, сканер, принтер)
Этапы разработки проекта:
-
Организационный этап (октябрь, ноябрь 2016г.)
-
знакомство с конструктором LEGO NXT
-
изучение основ программирования в среде LEGO MINDSTORMS
NXT 2.0
-
Этап реализации проекта ( декабрь 2016 г., январь 2017 г.)
-
разработка механизма робота на основе конструктора LEGO NXT.
-
составление программы для управления роботом в среде LEGO MINDSTORMS NXT 2.0
-
тестирование модели робота, устранение дефектов и неисправностей.
-
Заключительный этап (февраль 2017 г.)
-
защита проекта
-
демонстрация модели робота
Основная часть Теоретические положения
Робототехника – прикладная наука, занимающаяся разработкой автоматизированных технических систем. Робототехника опирается на такие дисциплины как электроника, механика, программирование.
Робототехника является одним из важнейших направлений научно- технического прогресса, в котором проблемы механики и новых технологий соприкасаются с проблемами искусственного интеллекта. Активное участие и поддержка Российских и международных научно-технических и образовательных проектов в области робототехники позволит ускорить подготовку кадров, развитие новых научно-технических идей, обмен технической информацией и инженерными знаниями, реализацию инновационных разработок в области робототехники в России и по всему миру.
Человечество остро нуждается в роботах, которые могут без помощи оператора тушить пожары, самостоятельно передвигаться по заранее неизвестной, реальной пересеченной местности, выполнять спасательные операции во время стихийных бедствий, аварий атомных электростанций, в борьбе с терроризмом. Кроме того, по мере развития и совершенствования робототехнических устройств возникла необходимость в мобильных роботах, предназначенных для удовлетворения каждодневных потребностей людей: роботах-сиделках, роботах-нянечках, роботах-домработницах, роботах — всевозможных детских и взрослых игрушках и т.д. И уже сейчас в современном производстве и промышленности востребованы специалисты обладающие знаниями в этой области. Начинать готовить таких специалистов нужно в школе и с самого младшего возраста. Поэтому, образовательная робототехника в школе приобретает все большую значимость и актуальность в настоящее время. В качестве основного оборудования при обучении детей робототехнике в школах предлагаются конструкторы LEGO MINDSTORMS NXT.
LEGO Mindstorms NXT – это конструктор (набор сопрягаемых деталей и электронных блоков) для создания программируемого робота.
Впервые представлен компанией LEGO в 1998 году.
С помощью этих наборов можно организовать высокомотивированную учебную деятельность по пространственному конструированию, моделированию и автоматическому управлению.
Конструирование робота.
Наша задача была создать робота, двигающегося по чёрной линии как можно с большей скоростью. Для этого были использованы балки и соединительные втулки различной величины и формы, два датчика освещённости, один датчик расстояния, два сервермотора, программируемый микрокомпьютер NXT 2.0 и соединительные провода. Для увеличения скорости использовали шестерёнки, по две на каждое колесо. В конструкции робота нужно было правильно подойти: к увеличению скорости, так как датчики освещённости не всегда успевали реагировать на изменение освещённости, к правильному расположению датчиков освещённости над игровым полем и к расстоянию между датчиками ( 1 см и 8-7 см ). Датчик расстояния нужно было установить так, чтобы он мог определить расстояние примерно до такого же по размерам робота.
Программирование робота.
Программирования робота проводилось в среде программирования NXT 2.0, на моноблоке.
Первый способ.
Для разработки программы был применён алгоритм движения по чёрной линии с использованием двух датчиков освещённости: когда два датчика одновременно находятся на белом поле или на чёрном (на перекрёстке) – работают два двигателя, если же правый находится на белым, а левый на чёрном поле, то правый двигатель работает, а левый стоп и наоборот, когда левый находится на белым, а правый на чёрном, то работает левый, а правый стоп. В результате такого программирования мы получили программу:
Второй способ.
Второй способ программирования заключается в том, что мощность работы двигателей зависит от величины показания датчиков освещённости. Показания датчиков обрабатываются с помощью арифметических блоков и подаются на двигатели. В результате мы получили такую программу:

Тестирование робота.
Для тестирования было изготовлено игровое поле. Его размеры и виды линий совпадали с размерами и видами линий, которые используются на соревнованиях по робототехнике.

В результате тестирования программ были сделаны выводы: вторая программа наиболее эффективная, так как в результате её исполнения робот проходил трассу плавне и в результате время на прохождения трассы робот тратил в два раза меньше.
Реализация проекта
На ступени реализации организационного этапа мы изучили:
-
основные компоненты конструкторов LEGO;
-
конструктивные особенности различных моделей, сооружений и механизмов;
-
компьютерную среду, включающую в себя графический язык программирования;
-
виды подвижных и неподвижных соединений в конструкторе;
-
виды имеющихся датчиков и принцип их работы;
-
основные приемы конструирования роботов;
-
конструктивные особенности различных роботов;
-
как передавать программы в NXT;
-
как использовать созданные программы;
-
приемы и опыт конструирования с использованием специальных элементов, и других объектов и т.д.).
Заключение
В ходе реализации проекта у нас сформировались умения и навыки:
-
самостоятельно решать технические задачи в процессе конструирования роботов (планирование предстоящих действий, самоконтроль, применять полученные знания, приемы и опыт конструирования с использованием специальных элементов и т.д.);
-
создавать действующие модели роботов на основе конструктора LEGO;
-
создавать программы на компьютере на основе компьютерной программы MINDSTORMS NXT 2.0;
-
передавать (загружать) программы в NXT;
-
корректировать программы при необходимости;
-
демонстрировать технические возможности роботов;
-
излагать логически правильно действие своей модели (проекта).
Вывод
В результате реализации проекта «Робот, движущийся по чёрной линии» у нас получилась модель робота, которую можно успешно использовать на соревнованиях по робототехнике. Мы получили первые навыки программирования в среде LEGO MINDSTORMS NXT 2.0.
Перспективы развития проекта
-
создание новых моделей роботов,
-
участие в различных состязаниях робот,
Библиографический список Список литературы для учителя:
-
Первый шаг в робототехнику: практикум для 5-6 классов/Д.Г.Копосов. М.: БИНОМ. Лаборатория знаний, 2012. – 87 стр.
-
Филиппов С.А. Робототехника для детей и родителей. – СПб.: Наука, 2010, 195 стр.
-
Образовательная робототехника в дополнительном образовании школьников: Методическое пособие/ Гинзбург Е.Е., Винокурова А.В. – Йошкар-Ола: ОАНО «Инфосфера», 2011. – 32 стр.
-
Программное обеспечение MINDSTORMS NXT 2.0 .
Список литературы для школьников:
-
Первый шаг в робототехнику: рабочая тетрадь для 5-6 классов/ Д.Г.Копосов. М.: БИНОМ. Лаборатория знаний, 2012
-
Филиппов С.А. Робототехника для детей и родителей. – СПб.: Наука, 2010,
-
Образовательная робототехника в дополнительном образовании школьников: рабочая тетрадь/ Гинзбург Е.Е., Винокурова А.В. – Йошкар-Ола: ОАНО «Инфосфера», 2011
Интернет ресурсы:
-
http://lego.rkc-74.ru/
-
http://www.lego.com/education/
-
http://www.wroboto.org/
-
http://www.roboclub.ru/
-
http://robosport.ru/
-
http://www.prorobot.ru/
Данный материал предназначен для соревнования «Шорт трек» категории «Hello, robot!». Всего в инструкции (презентации) содержится 45 слайдов, многие слайды являются повторами одной и той же конструкции, но в разных проекциях (показаны скриншоты с разных углов обзора).
Данная конструкция робота разработана на базе конструктора Mindstorms Education EV3 #45544. Возраст обучающихся: 4 – 8 классы. УМК любой.
Презентация выполнена при помощи ПО Lego Digital Designer ver.4.3.


Понравилось? Сохраните и поделитесь:
Неограниченная бесплатная загрука материала «Инструкция по сборке «LEGO-робот 4х4 с 2-мя датчиками цвета и датчиком расстояния для шорт-трека»» доступна всем пользователям. Разработка находится в разделе «Дополнительное образование» и представляет собой: «урок нов. материал, игра, викторина, факультатив».

Загрузка началась…
Понравился сайт? Получайте ссылки
на лучшие материалы еженедельно!

Подарок каждому подписчику!
Перейти к содержанию
Мобильный однорычажный манипулятор Lego EV3 — модель для отработки навыков программирования и алгоритмов навигации на соревновательном поле. Модель собрана из деталей одной коробки Lego Mindstorms Education EV3 и имеет два датчика цвета для следования по линии. Один датчик цвета на захвате используется для определения цвета перетаскиваемых объектов. Кроме инструкции по сборке подготовили примерный регламент для проведения соревнования на кружке робототехники. Дополнительно можно скачать готовую программу к полю Шорт-трек с необходимыми комментариями, реализация которой показана на видео.
Фото:









Оборудование: базовый набор Lego Mindstorms Education EV3, поле для сортировки кубиков, два кубика 50х50х50 мм с цветными метками, цилиндр 65х125 мм (или другая подставка).
Механизмы: зубчатая передача, рычаг.
Модель: МОМ-В2 – мобильный однорычажный манипулятор, вариант 2.
Описание.
Данная модель собрана на базе модульной робоплатформы МРП-В3. Центр масс смещен назад, что дает возможность поднимать достаточно тяжелые предметы без опрокидывания.
Манипулятор выполнен по однорычажной схеме. Большой мотор поднимает рычаг с установленным захватом через понижающую зубчатую передачу 5:1.
Примерные габариты робота с установленным манипулятором и захватом:
- длина: 25 см
- ширина: 16 см
- высота: 18 см
Захват хорошо подходит для кубиков 5х5х5 см.
Задачи:
- Собери мобильный манипулятор по инструкции.
- Выполни предложенные задачи по переносу или сортировке предметов.
Примеры страниц:





Для подписчиков (старый способ)
Чтобы скачать файлы, вы должны зарегистрироваться или войти на сайт, а также иметь действующий аккаунт доступа. После этого увидите кнопку для загрузки.
Аккаунт доступа «Lego EV3 (архивный способ оплаты)»
LegoEV3 12 мес.
1301
Архивный способ оплаты. Скачать инструкции можно на сайте market.robo-wiki.ru
( 1 оценка, среднее 5 из 5 )
-
Главная
-
RoboLab
-
EV3 Робот для соревнований. Kegelring, Short Track, RoboFootball || Инструкция по сборке
Просмотров: 1 098

Если вам понравилось бесплатно смотреть видео ev3 робот для соревнований. kegelring, short track, robofootball || инструкция по сборке онлайн которое загрузил RoboLab 19 июня 2022 длительностью 00 ч 06 мин 00 сек в хорошем качестве, то расскажите об этом видео своим друзьям, ведь его посмотрели 1 098 раз.
Copyright ©
Epicube.su
Смотрите видео на портале epicube.su совершенно бесплатно и без регистрации. Наша видеотека каждый день обновляется лучшими роликами со всего мира!
![]()
admin@epicube.su Наша почта для ваших пожеланий и связи с нами.