User’s Manual
The content in this manual has been carefully prepared and is believed to be accurate, but no
For
responsibility is assumed for inaccuracies.
DM556
Leadshine reserves the right to make changes without further notice to any products herein to
improve reliability, function or design. Leadshine does not assume any liability arising out of the
application or use of any product or circuit described herein; neither does it convey any license
under its patent rights of others.
Leadshine’s general policy does not recommend the use of its products in life support or aircraft
Fully Digital Stepping Driver
applications wherein a failure or malfunction of the product may directly threaten life or injury.
Version 1.0
According to Leadshine’s terms and conditions of sales, the user of Leadshine’s products in life
©2009 All Rights Reserved
support or aircraft applications assumes all risks of such use and indemnifies Leadshine against all
Attention: Please read this manual carefully before using the Driver!
damages.
©2009 by Leadshine Technology Company Limited.
All Rights Reserved
Драйвер цифрового шагового двигателя DM556
Информация о продукте: MotorDriver DM556
MotorDriver DM556 — это цифровой шаговый привод,
разработан для легкой настройки и простой эксплуатации. Шаговый привод
использует передовую технологию шагового управления для питания 2-фазных и
4-фазные шаговые двигатели плавно с оптимальным крутящим моментом и низким двигателем
нагрев и шум. Имеет рабочий объемtage 20-50 В постоянного тока и
может выдавать ток до 5.6А. Микрошаг и выходная электрическая
Текущая конфигурация может быть выполнена с помощью DIP-переключателей. Этот степпер
привод является идеальным выбором для приложений, требующих простого шага
и управление направлением шаговых двигателей NEMA 23, 24 и 34.
Особенности и характеристики:
- Разъем управляющих сигналов
- Импульсный (STEP) сигнал: Импульсные входы активны по переднему фронту; 4-5В
при PUL-HIGH, 0-0.5 В при PUL-LOW. Минимальная длительность импульса 2.5 с.
Добавьте резистор для ограничения тока при входной логике +12 В или +24 В.
обtage (1K для +12В, 2k для +24В; То же самое для DIR и ENA
сигналы). - Сигнал DIR (НАПРАВЛЕНИЕ): Этот сигнал имеет низкую/высокую громкость.tagуровни е
для представления двух направлений вращения двигателя. Минимальное направление
время установки 5с. Также поменять местами соединение двух проводов
катушка (например, A+ и A-) к приводу реверсирует двигатель
направлении. - Enable signal: Этот сигнал используется для включения/выключения
водить машину. Высокий уровень +5В для включения привода и низкий уровень для
отключение привода. По умолчанию он оставлен НЕПОДКЛЮЧЕННЫМ
(ВКЛЮЧЕНО).
- Импульсный (STEP) сигнал: Импульсные входы активны по переднему фронту; 4-5В
- DIP-переключатель
- Конфигурации разрешения Microstep: SW5
- Текущие конфигурации: Пиковый ток ВКЛ/ВЫКЛ SW1, SW2, SW3
- Конфигурации тока холостого хода двигателя: SW4
- Функции защиты
- Два светодиода на драйвере: ЗЕЛЕНЫЙ (индикатор питания) и КРАСНЫЙ
(индикатор защиты) - Типы защиты: защита от перегрузки по току, перегрузкаtage
защиту
- Два светодиода на драйвере: ЗЕЛЕНЫЙ (индикатор питания) и КРАСНЫЙ
Инструкции по использованию продукта:
Чтобы использовать MotorDriver DM556, выполните следующие действия:
- Подключите разъем управляющих сигналов к шаговому
двигатель. - Настройте микрошаг и выходной электрический ток с помощью
DIP-переключатели. - Установите ток холостого хода двигателя в процентахtagе с помощью SW4.
- Настройте пиковый ток с помощью переключателей SW1, SW2 и SW3.
- Подайте питание на шаговый привод.
- Посылайте импульсные (STEP) сигналы на шаговый привод, чтобы вращать
двигатель в нужном направлении. - При необходимости используйте сигнал DIR (DIRECTION) для изменения направления.
вращения двигателя. - Используйте сигнал Enable для включения/выключения шагового привода.
- Обратите внимание на ЗЕЛЕНЫЙ индикатор питания, который всегда должен гореть.
о. - Следите за КРАСНЫМ индикатором защиты, который мигнет 1-2 раза.
в течение 3 секунд, если защита включена. Разное количество
мигает указывает на другой тип защиты.
Мотордрайвер DM556
2022 Ред.09
Отказ от ответственности
MOTOR DRIVER DM566 ПРЕДОСТАВЛЯЕТСЯ ВАМ «КАК ЕСТЬ» БЕЗ КАКИХ-ЛИБО ГАРАНТИЙ. НЕ ПРЕДОСТАВЛЯЕТСЯ НИКАКИХ ГАРАНТИЙ НА МОТОРНЫЙ ПРИВОД, ЯВНЫХ ИЛИ ПОДРАЗУМЕВАЕМЫХ, ВКЛЮЧАЯ, ПОМИМО ПРОЧЕГО, ПОДРАЗУМЕВАЕМЫЕ ГАРАНТИИ КОММЕРЧЕСКОЙ ПРИГОДНОСТИ И ПРИГОДНОСТИ ДЛЯ ОПРЕДЕЛЕННОЙ ЦЕЛИ И НЕНАРУШЕНИЯ ПРАВ ТРЕТЬИХ ЛИЦ. ВЕСЬ РИСК, КАСАЮЩИЙСЯ КАЧЕСТВА И ПРОИЗВОДИТЕЛЬНОСТИ УСТРОЙСТВ, ЛЕЖИТ НА ВАС. ЕСЛИ ДАТЧИК ВЫСОТЫ ИЛИ КОНТРОЛЛЕР ВЫСОТЫ ОКАЖЕТСЯ НЕИСПРАВНЫМИ, ВЫ ПРИНИМАЕТЕ НА СЕБЯ СТОИМОСТЬ ВСЕХ НЕОБХОДИМЫХ ОБСЛУЖИВАНИЯ, РЕМОНТА ИЛИ ИСПРАВЛЕНИЯ.
НИ ПРИ КАКИХ ОБСТОЯТЕЛЬСТВАХ АВТОР НЕ НЕСЕТ ОТВЕТСТВЕННОСТИ ПЕРЕД ВАС ЗА УЩЕРБ, ВКЛЮЧАЯ ЛЮБЫЕ ОБЩИЕ, ОСОБЫЕ, СЛУЧАЙНЫЕ ИЛИ КОСВЕННЫЕ УБЫТКИ, ВОЗНИКШИЕ В РЕЗУЛЬТАТЕ ИСПОЛЬЗОВАНИЯ ИЛИ НЕВОЗМОЖНОСТИ ИСПОЛЬЗОВАНИЯ MOTOR DRIVER DM566.
Введение
Обзор
DM556 — это цифровой шаговый привод с простой конструкцией и простой настройкой. Благодаря внедрению передовой технологии управления шаговым двигателем этот шаговый привод способен плавно питать 2-фазные и 4-фазные шаговые двигатели с оптимальным крутящим моментом и низким уровнем нагрева и шума двигателя.
Его рабочий объемtage составляет 20-50 В постоянного тока и может выдавать ток до 5.6 А. Конфигурация микрошага и выходного электрического тока осуществляется с помощью DIP-переключателей.
Таким образом, DM556T является идеальным выбором для приложений, требующих простого управления шагом и направлением шаговых двигателей NEMA 23, 24 и 34.
Особенности и технические характеристики:
– Антирезонанс для оптимального крутящего момента, сверхплавного движения, низкого нагрева и шума двигателя – Автоматическая идентификация двигателя и автоматическая настройка параметров для оптимального крутящего момента от двигателей широкого диапазона – Управление шагами и направлениями (PUL/DIR) – Многоступенчатое управление для плавное движение двигателя -TTL-совместимые и оптически изолированные входы -Input voltage 20–50 В пост. кГц. -Автоматическое снижение тока холостого хода -Защита от перенапряженияtagе и перегрузки по току
Разъем управляющих сигналов
· Сигнальные входы STEP & DIRECTION · Активация входного сигнала · Все входы оптически изолированы и совместимы с TTL
Функция контакта PUL+ PULDIR+ DIRENA+ ENA-
Подробное описание
Импульсный (шаговый) сигнал: Импульсные входы активны по переднему фронту; 4-5В при ИМПУЛЬСНОМ ВЫСОКОМ, 0-0.5В при ИМПУЛЬСНОМ-НИЗКОМ. Минимальная длительность импульса 2.5 с. Добавьте резистор для ограничения тока при входной логической громкости +12 В или +24 В.tage (1 кОм для +12 В, 2 кОм для +24 В; то же самое для сигналов DIR и ENA).
Сигнал DIR(DIRECTION): Этот сигнал имеет низкую/высокую громкость.tagУровни e для представления двух направлений вращения двигателя. Минимальное время установки направления 5 с. Также замена местами подключения двух проводов катушки (например, A+ и A-) к приводу изменит направление вращения двигателя.
Сигнал включения: Этот сигнал используется для включения/выключения привода. Высокий уровень +5В для включения привода и низкий уровень для отключения привода. По умолчанию он оставлен НЕПОДКЛЮЧЕННЫМ (ВКЛЮЧЕНО).
DIP-переключатель
· В приводе используется 8-битный DIP-переключатель для установки разрешения микрошага и рабочего тока двигателя. · Разрешение микрошага устанавливается с помощью SW 5, 6, 7, 8 DIP-переключателей. · Рабочий электрический ток устанавливается с помощью SW 1, 2, 3. DIP-переключателей · Ток холостого хода двигателя в процентахtage устанавливается SW 4 DIP-переключателей
Конфигурации разрешения микрошага:
Микрошаг Шаг/об (для двигателя 1.8°)
SW5
2
400
OFF
4
800
ON
8
1600
OFF
16
3200
ON
32
6400
OFF
64
12800
ON
128
25600
OFF
5
1000
ON
10
2000
OFF
20
4000
ON
25
5000
OFF
40
8000
ON
50
10000
OFF
100
20000
ON
125
25000
OFF
SW5 ON OFF OFF ON ON OFF OFF ON ON OFF OFF ON ON OFF OFF
SW7 ВКЛ ВКЛ ВКЛ ВЫКЛ ВЫКЛ ВЫКЛ ВКЛ ВКЛ ВКЛ ВЫКЛ ВЫКЛ ВЫКЛ ВКЛ ВКЛ ВКЛ
SW8 ON ON ON ON ON ON ON OFF OFF OFF OFF OFF OFF OFF OFF OFF
Текущие конфигурации:
Пиковый ток
1.4А 2.1А 2.7А 3.2А 3.8А 4.4А 4.9А 5.6А
ВКЛ ВЫКЛ ВКЛ ВЫКЛ ВКЛ ВЫКЛ ВКЛ ВЫКЛ
SW1
SW2 ВКЛ ВКЛ ВЫКЛ ВЫКЛ ВКЛ ВКЛ ВЫКЛ ВЫКЛ
SW3 ВКЛ ВКЛ ВКЛ ВКЛ ВЫКЛ ВЫКЛ ВЫКЛ ВЫКЛ
Конфигурации тока холостого хода двигателя:
SW4 используется для установки тока холостого хода двигателя в процентах.tagе. В положении OFF это означает, что ток покоя установлен равным 50% от выбранного выходного тока.
В положении ON это означает, что ток покоя установлен таким же, как выбранный динамический ток. Ток автоматически уменьшается до 50% от выбранного динамического тока через 0.4 секунды после последнего импульса.
Функции защиты
На драйвере два светодиода.
— ЗЕЛЕНЫЙ — это индикатор питания, который обычно горит всегда. — КРАСНЫЙ — это индикатор защиты, который будет мигать 1-2 раза в течение 3 секунд, когда защита включена.
Разное количество вспышек указывает на разный тип защиты.
Приоритет Время (с) мигания Последовательность волн красного светодиода
1
1
Описание
Защита от перегрузки по току срабатывает, когда пиковый ток превышает предел
2
2
3
3
Over-voltagЗащита срабатывает при работе приводаtage больше 60 В постоянного тока
Зарезервированный
Разъем питания и двигателя:
Разъем питания:
Драйвер рассчитан на работу в диапазоне +20 – +50 В пост.tagе вход. При подборе блока питания кроме vol.tagе от линии питания источника питания voltage флуктуация и обратная ЭДС voltagЭлектроэнергия, возникающая при торможении двигателя, также необходимо учитывать.
В идеале рекомендуется использовать источник питания с выходным диапазоном от +24 до +48 В постоянного тока, оставляя место для напряжения сети питания.tage колебания и противо-ЭДС.
Более высокий объем предложенияtage может увеличивать крутящий момент двигателя на более высоких скоростях, что помогает избежать потери шагов. Однако более высокая громкостьtage может вызвать более сильную вибрацию двигателя на более низкой скорости, а также может вызвать перенапряжениеtage защиты или даже повреждения привода.
Поэтому предлагается выбирать только достаточно высокий объем предложения.tagе для предполагаемого применения.
Разъем двигателя:
Драйвер может управлять 2-фазными и 4-фазными биполярными гибридными шаговыми двигателями с 4, 6 или 8 проводами.
Функция контакта GND +V A+,AB+,B-
Заземление источника питания
Подробное описание
Положительное соединение источника питания.
Соединения фазы А двигателя. Подключите провод A+ двигателя к контакту A+; мотор А- провод к А-
Соединения фазы В двигателя. Подключите провод двигателя B+ к контакту B+; двигатель B- провод к B-
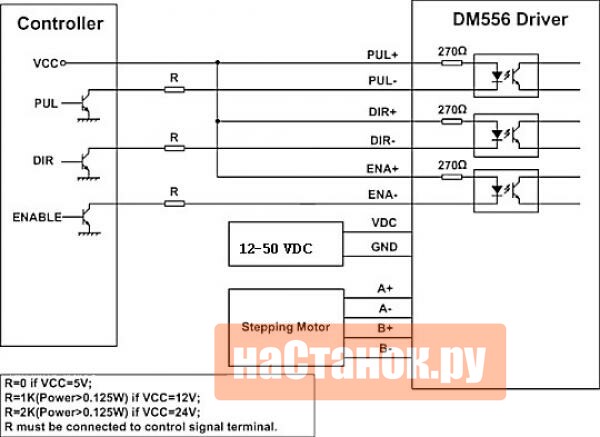
Схемы подключения
Подключение контроллера, шагового драйвера, шагового двигателя и источника питания:
Подключение шагового двигателя и шагового драйвера:
Плата адаптера драйвера двигателя:
Драйвер двигателя DM566 включает в себя также адаптерную плату для более удобного соединения выхода оси контроллера движения с разъемом управляющего сигнала драйвера шагового двигателя. 10-контактный ленточный кабель также входит в комплект.
На рисунках ниже описывается тип использования:
Содержание
Введение………………………………………………………………………………………………………………….. 3 Болееview…………………………………………………………………………………………………………………… .. 3
Особенности и технические характеристики:………………………………………………………………………………………………….4 Разъем управляющих сигналов…………… ……………………………………………………………………………………5 DIP-переключатель………………………………………… ………………………………………………………………………… 6 конфигураций разрешения микрошага:……………………………………………… ………………………………..6 Текущие конфигурации:……………………………………………………………………………………… ……..7 Конфигурации тока холостого хода двигателя:…………………………………………………………………………………..7 Функции защиты…………… ……………………………………………………………………………………….7 Разъем питания и двигателя:……………………………… ………………………………………………………………..8 Разъем питания:……………………………………………………… …………………………………………….. 8 Разъем двигателя:……………………………………………………………………… ……………………………….. 8
Схемы подключения……………………………………………………………………………………………………….. 9 Подключение контроллера, шагового двигателя , шаговый двигатель и блок питания:……………………………9 Подключение шагового двигателя и шагового драйвера:……………………………………………………………… .10
Плата адаптера драйвера двигателя:…………………………………………………………………………………………… 11
Документы / Ресурсы
Драйвер DM556 — драйвер шагового двигателя с цифровым процессором работающий на современных управляющих алгоритмах STET DIR. В основе устройства реализованы максимальная плавность движения шагового двигателя, высокий отдаваемый момент на валу и методы подавления резонанса (двигатели работают тихо, вибрация меньше). Драйвер шагового двигателя — (анг.) Microstep Driver DM556 (JMC).
-
Поддерживает входное напряжение от 20 до 50 В постоянного тока, с рекомендованным значением 36 Вольт.
-
Максимальное значение выходного тока составляет 5,6 Ампер.
-
Частоту отклика импульса до 200 кГц, что позволяет ему оперативно реагировать на изменения входных сигналов.
-
Устройство обладает хорошими характеристиками вибрации и шума, что делает его подходящим для приложений, где требуется минимальное воздействие на окружающую среду.
-
Имеет функцию подавления резонанса, что обеспечивает оптимальный крутящий момент и стабильную работу.
-
DM556 снижает ток при холостом ходе, что может снизить энергопотребление и повысить эффективность работы.
-
Устройство подходит для управления 2-фазными и 4-фазными двигателями с током фазы до 5,6 Ампер.
-
Поддерживает режимы управления PUL/DIR, что позволяет использовать его с различными системами управления двигателем.
-
Шаговый драйвер имеет защиту от перегрева и перегрузки по току, что может обеспечить безопасность и защиту от повреждений.
-
Поддерживает режим микрошага с 15 режимами работы и максимальным значением 25600 импульсов на оборот, что позволяет достичь высокой точности управления двигателем.

ВАЖНО: Переключатели на драйвере настраивайте только тогда, когда драйвер полностью отключен от питания.
Для подключения драйвера DM556 к вашей системе управления двигателем, следуйте инструкциям производителя и учитывайте следующие общие рекомендации:
-
Напряжение питания: Подключите источник питания с напряжением в диапазоне от 20 до 50 В постоянного тока, с рекомендованным значением 36 Вольт, к соответствующим контактам на драйвере.
-
Подключение двигателя: Подключите ваш двигатель к выходам драйвера DM556. Обычно это делается с использованием соответствующих контактов, таких как A+, A-, B+ и B-, в зависимости от типа двигателя и его фазности. Убедитесь, что правильно подключаете фазы и контакты в соответствии с требованиями вашего двигателя и инструкциями производителя драйвера.
-
Управляющие сигналы: Подключите управляющие сигналы к соответствующим контактам устройства. Обычно это сигналы PUL (пульсовый сигнал) и DIR (направление вращения), которые используются для управления скоростью и направлением вращения двигателя. Убедитесь, что правильно подключаете эти сигналы в соответствии с требованиями вашей системы управления двигателем.
-
Микрошаг: Если вы планируете использовать функцию микрошага, настройте соответствующий режим микрошага, используя указанные в инструкциях производителя настройки или программное обеспечение управления, если таковое предусмотрено.
-
Защита: Убедитесь, что соответствующие функции защиты от перегрева, перегрузки по току и других непредвиденных ситуаций настроены и подключены в соответствии с требованиями вашей системы и инструкциями производителя драйвера.
-
Тестирование и настройка: После подключения проведите тестирование и настройку драйвера DM556 в соответствии с инструкциями производителя и требованиями вашей системы управления двигателем. Убедитесь, что двигатель работает правильно, и все функции драйвера настроены и функционируют в соответствии с вашими ожидания

Почему выгодо купить драйвер DM556 в нашем магазине
DM556 драйвер, доступный в магазине naStanok, представляет собой высокотехнологичное устройство управления шаговыми двигателями. Он работает от постоянного напряжения в диапазоне от 24 до 50 В и поддерживает нагрузку в виде шаговых двигателей с рабочим током до 4 А, с возможностью кратковременного изменения тока до 5,6 А в режиме пика. Прибор предлагает 16 режимов микрошага, что позволяет более точное и гладкое движение вала двигателя. Он также обладает защитными функциями, такими как автоматическое снижение тока в случае перегрузки и автоматическое отключение при отсутствии сигналов управления в течение 0,5 секунды, что способствует безопасной работе системы.
DM556 драйвер отличается высоким качеством и надежностью, поскольку производится оригинальным производителем. Он идеально подходит для использования в системах ЧПУ с шаговыми двигателями типа Nema, и его приобретение в магазине naStanok позволит минимизировать потери времени и затраты на замену электронной платы в случае ее выхода из строя. Мы предлагаем драйвер по приемлемым ценам, обеспечивая оптимальное соотношение цены и качества.
При покупке DM556 драйвера вы получите высокотехнологичное устройство, способное обеспечить плавное движение шаговых двигателей, снижение вибраций и оптимальный крутящий момент. Драйвер легко настраивается и имеет защитные функции, обеспечивающие безопасную и надежную работу системы. Он подходит для использования с шаговыми двигателями Nema23, Nema34 и предлагается по приемлемым ценам. Для предотвращения возможных простоев вашего предприятия вам рекомендуется приобрести драйверы с запасом в магазине naStanok.ru. Это позволит минимизировать потери времени, так как монтаж и замена электронной платы производятся легко и быстро, без необходимости привлекать дополнительных специалистов.
Доброго времени суток, уважаемые коллеги! Сегодня сделаем правильное подключение БОЛЬШИХ (или не очень :))) ) внешних драйверов для 3D принтера, чтобы все РАБОТАЛО и работало как надо: без смещений и прочей чепухи, которую даже опытный боец может принять за износ механики!
-На что обратить внимание в первую очереди?
-Напряжение не только ПИТАНИЯ, но и ЛОГИКИ! Далее капсом не пользуюсь;))
Дело в том, что наши платы выдают до 3,3 вольта на логический сигнал (не нужно сейчас лезть с мультиметром, это на десерт!!!!), для драйвера по типу А4988 вполне, а вот что побольше и подальше от управляющей платы часто требует 4,5-5 вольт или даже 12/24 вольта но в паре с резисторами (чтобы не спалить мозги). Сегодняшние претенденты на звание идеально совместимой пары управляющей платы и внешнего драйвера для точного перемещения…..
Плата SKR V2.0 и драйвера DM556. У кого что-то другое (хоть пара рампс и tb6600) не переживайте, инструкция универсальна!!!
Собственно драйвер:
)") И плата:
И плата:
)")
От платы на драйвера у нас всегда идут только два управляющих сигнала: STEP (его ещё называют PULSE) — сигнал шага и DIR — в какую сторону «шагать». Можно посмотреть их на обороте платы или на маленьком драйвере (в какую ячейку втыкивается ножка когда вставляете драйвер), у маленьких драйверов это соседние ножки, также найдем GND напротив DIR:
)")
Мои STEP (левая ячейка для одной ножки) и DIR (правая ячейка для одной ножки), GND напротив DIR
)")
Проверим же наверняка сколько вольт выдают пины нашей логики! В 99,9% случаев у плат для 3D принтеров это будет до 3,3 вольт. Замеряем напряжение мультиметром в режиме постоянного тока на каком-нибудь из рабочих концевиков (тот что щелкает при парковке), для этого отключаем его и тыкаем щупами в логический пин (тот что не +5V) и GND, у меня получилось +3,25 V (если перепутали плюс и GND,то покажет -3,25 V)
-Почему не измерил пины STEP и DIR?
-Для этого пришлось бы использовать не мультиметр за 450 рублей, а осциллограф, который бы улавливал импульсный ток во время движения по осям. STEP и DIR импульсные сигналы, имеющие частоту (до 200 000 раз в секунду ) и ширину (грубо говоря это длительность импульса), в отличии от вкл/выкл режима концевичков. Однако и то и то идет по пути логического сигнала от управляющего чипа, вряд ли будет иное напряжение на STEP и DIR. Если нет осциллографа, но очень хочется проверить что выдает именно STEP и DIR , то придется поменять одного из них местами с логическим пином концевика, по этому поводу я снял небольшое видео где меняю пины термисторов https://www.youtube.com/watch?v=oS29VAp2JGo , главное не забудьте потом вернуть все на место!
Переходим к драйверу!!! Гуглим DM556 pdf, нам выдается инструкция то ли даташит (уж как не называй) на наш драйвер. Иногда есть несколько инструкций, смело выбирайте наиболее удобную (с красивыми табличками и рисунками)). Листаем до табличек с описанием токов нашим драйверам:)")
Тут нас интересуют:
1) Output current — максимальный ток на двигателе, который указывается в PDF двигателя и выставляется маленькими переключателями на драйвере
2) Supply voltage — напряжение блока питания драйвера , 36 ок, но пальцы лучше не сувать
Если набрать название нашего мотора и слово PDF, то там помимо ампер будет указание VDC и значение порядка 1-5 вольт, однако драйвера управляют моторами не постоянным током, а по принципу шим (кто слышит писк мотора — это работа шим), что это читайте отдельно, но если коротко 36 вольт подаются не постоянно, а вкл/выкл много много раз в секунду
3) Logic signal current — ток для логического сигнала , до 16 мА, то есть до 0,016 А
4) Pulse input frequency — частота логики в кГЦ, до 200 кГЦ (Понадобится при прошивке )
5) Что-то там про сопротивление изоляции, не важно))
Проматываем до таблички управляющих сигналов и тут… 4-5 V для верхнего сигнала PUL (STEP) и DIR!!! А при наличии резисторов можно и 12 вольт и 24, но у нас только 3,25 V.
)")
Что касается сигнала ENA (Enable) его обычно не подключают т.к. из-за него драйвер будет игнорировать сигналы STEP и DIR , зачем оно нам?)) Но кому надо тому надо!)) Перед тем как начнем паять (или кому удобнее собирать брэдборд) листаем наш pdf и находим схемку с сопротивлением пинов драйвера:)")
Сопротивление 270 Ом, при напряжении 4-5 вольт ток по закону Ома как раз около 16 мА, при 12 и резисторе на 1 кОМ +270 Ом уже 9,5 мА, при 24 и 2кОМ + 270 Ом тоже в районе 10 мА, как того и требует инструкция. На наших платах достаточно 5-ти вольтовых источников питания для концевиков, используем их. Тут нужно загуглить ближайший «Магазин радиотехники» и набрать npn транзисторов и к ним резисторов (dc-dc повышающие преобразователи не прокатят). Стоят они по несколько рублей (а иногда и по рублю), какие именно нужно можно легко подсчитать:
Сопротивление как DIR так и STEP у драйвера 270 Ом, напряжение хотим 4-5V (это напряжение коллектор-эмиттер), а управляющий сигнал порядка 3,25 вольт (это напряжение база-эмиттер) . Под такие цели можно найти много транзисторов, я выберу 2N3904, у которого напряжение база-эмиттер до 6 вольт, а коллектор-эмиттер аж до 40.
)") На один драйвер понадобится 2 транзистора. Резисторов же нужно аж 2 штуки. Рассчитаем какие нужны:
На один драйвер понадобится 2 транзистора. Резисторов же нужно аж 2 штуки. Рассчитаем какие нужны:
Т.к. у нас напряжение +5 вольт с платы, а транзисторы снижают напряжение где-то на 0,6 вольт, то при 4,4 вольтах и 270 Ом ток коллектор-эмиттер будет около 16 мА, что хорошо. Смотрим на картинку — база это лапка посередине, к ней подключаем наши 3,25 вольт через резистор номиналом (3,25-0,6)/(0,016/200)=33000 Ом или 33 кОМ, где 3,25 V это напряжение логики, 0,6 V падение напряжение, 0,016 A подсчитанный выше ток, 200 это средний коэффициент усиления (hfe) транзистора с картинки выше. Таким образом нам нужен резистор 33-35 кОМ. Также необходим более мощный резистор на 500-1000 кОМ (1 мегаом), который будет служить стягивающим резистором, получится так:
)")
Осталось совсем немного!! Надо подправить прошивку под наш внешний драйвер: задать частоту, длительность импульса и задержки)) Кто перепиновывал пин — вернуть все обратно. Заходим в Configuration_adv.h, изменяем количество сегментов (у нас ведь теперь хорошие большие драйвера:))
/ Moves (or segments) with fewer steps than this will be joined with the next move
#define MIN_STEPS_PER_SEGMENT 1
Далее устанавливаем задержки для сигнала DIR по PDF файлу драйвера (таблички в начале), у меня это минимум 5 микросекунд, тут её указывают в наносекундах, значит 5000 ns, я поставлю 6000
/**
* Minimum delay before and after setting the stepper DIR (in ns)
* 0 : No delay (Expect at least 10µS since one Stepper ISR must transpire)
* 20 : Minimum for TMC2xxx drivers
* 200 : Minimum for A4988 drivers
* 400 : Minimum for A5984 drivers
* 500 : Minimum for LV8729 drivers (guess, no info in datasheet)
* 650 : Minimum for DRV8825 drivers
* 1500 : Minimum for TB6600 drivers (guess, no info in datasheet)
* 15000 : Minimum for TB6560 drivers (guess, no info in datasheet)
*
* Override the default value based on the driver type set in Configuration.h.
*/
#define MINIMUM_STEPPER_POST_DIR_DELAY 6000
#define MINIMUM_STEPPER_PRE_DIR_DELAY 6000
Очень важная штука — ширина импульса, в табличке пишут что pul не менее 2,5 микросекунд, но лучше я поставлю 5 микросекунд.
/**
* Minimum stepper driver pulse width (in µs)
* 0 : Smallest possible width the MCU can produce, compatible with TMC2xxx drivers
* 0 : Minimum 500ns for LV8729, adjusted in stepper.h
* 1 : Minimum for A4988 and A5984 stepper drivers
* 2 : Minimum for DRV8825 stepper drivers
* 3 : Minimum for TB6600 stepper drivers
* 30 : Minimum for TB6560 stepper drivers
*
* Override the default value based on the driver type set in Configuration.h.
*/
#define MINIMUM_STEPPER_PULSE 5
И конечно же частота импульса. Драйвера способны выдавать до 200 кГц, но мы увеличили длительность импульса в 2 раза, поэтому уменьшаем частоту в 2 раза и оставляем 100 кГц
* Maximum stepping rate (in Hz) the stepper driver allows
* If undefined, defaults to 1MHz / (2 * MINIMUM_STEPPER_PULSE)
* 5000000 : Maximum for TMC2xxx stepper drivers
* 1000000 : Maximum for LV8729 stepper driver
* 500000 : Maximum for A4988 stepper driver
* 250000 : Maximum for DRV8825 stepper driver
* 150000 : Maximum for TB6600 stepper driver
* 15000 : Maximum for TB6560 stepper driver
*
* Override the default value based on the driver type set in Configuration.h.
*/
#define MAXIMUM_STEPPER_RATE 100000
!!!!И ТЕПЕРЬ САМОЕ ВАЖНОЕ!!!
Без чего драйвера не будут работать (а так могут неплохо «шевелиться» и на 3,25 вольт):
Практически для всех больших драйверов тут нужно поменять false на true
// By default pololu step drivers require an active high signal. However, some high power drivers require an active low signal as step.
define INVERT_X_STEP_PIN true
#define INVERT_Y_STEP_PIN false
#define INVERT_Z_STEP_PIN false
#define INVERT_I_STEP_PIN false
#define INVERT_J_STEP_PIN false
#define INVERT_K_STEP_PIN false
#define INVERT_U_STEP_PIN false
#define INVERT_V_STEP_PIN false
#define INVERT_W_STEP_PIN false
#define INVERT_E_STEP_PIN false
Доброго времени суток, уважаемые коллеги! Сегодня сделаем правильное подключение БОЛЬШИХ (или не очень :))) ) внешних драйверов для 3D принтера, чтобы все РАБОТАЛО и работало как надо: без смещений и прочей чепухи, которую даже опытный боец может принять за износ механики!
-На что обратить внимание в первую очереди?
-Напряжение не только ПИТАНИЯ, но и ЛОГИКИ! Далее капсом не пользуюсь;))
Дело в том, что наши платы выдают до 3,3 вольта на логический сигнал (не нужно сейчас лезть с мультиметром, это на десерт!!!!), для драйвера по типу А4988 вполне, а вот что побольше и подальше от управляющей платы часто требует 4,5-5 вольт или даже 12/24 вольта но в паре с резисторами (чтобы не спалить мозги). Сегодняшние претенденты на звание идеально совместимой пары управляющей платы и внешнего драйвера для точного перемещения…..
Плата SKR V2.0 и драйвера DM556. У кого что-то другое (хоть пара рампс и tb6600) не переживайте, инструкция универсальна!!!
Собственно драйвер:
И плата:
От платы на драйвера у нас всегда идут только два управляющих сигнала: STEP (его ещё называют PULSE) — сигнал шага и DIR — в какую сторону «шагать». Можно посмотреть их на обороте платы или на маленьком драйвере (в какую ячейку втыкивается ножка когда вставляете драйвер), у маленьких драйверов это соседние ножки, также найдем GND напротив DIR:
Мои STEP (левая ячейка для одной ножки) и DIR (правая ячейка для одной ножки), GND напротив DIR
Проверим же наверняка сколько вольт выдают пины нашей логики! В 99,9% случаев у плат для 3D принтеров это будет до 3,3 вольт. Замеряем напряжение мультиметром в режиме постоянного тока на каком-нибудь из рабочих концевиков (тот что щелкает при парковке), для этого отключаем его и тыкаем щупами в логический пин (тот что не +5V) и GND, у меня получилось +3,25 V (если перепутали плюс и GND,то покажет -3,25 V)
-Почему не измерил пины STEP и DIR?
-Для этого пришлось бы использовать не мультиметр за 450 рублей, а осциллограф, который бы улавливал импульсный ток во время движения по осям. STEP и DIR импульсные сигналы, имеющие частоту (до 200 000 раз в секунду ) и ширину (грубо говоря это длительность импульса), в отличии от вкл/выкл режима концевичков. Однако и то и то идет по пути логического сигнала от управляющего чипа, вряд ли будет иное напряжение на STEP и DIR. Если нет осциллографа, но очень хочется проверить что выдает именно STEP и DIR , то придется поменять одного из них местами с логическим пином концевика, по этому поводу я снял небольшое видео где меняю пины термисторов https://www.youtube.com/watch?v=oS29VAp2JGo , главное не забудьте потом вернуть все на место!
Переходим к драйверу!!! Гуглим DM556 pdf, нам выдается инструкция то ли даташит (уж как не называй) на наш драйвер. Иногда есть несколько инструкций, смело выбирайте наиболее удобную (с красивыми табличками и рисунками)). Листаем до табличек с описанием токов нашим драйверам:
Тут нас интересуют:
1) Output current — максимальный ток на двигателе, который указывается в PDF двигателя и выставляется маленькими переключателями на драйвере
2) Supply voltage — напряжение блока питания драйвера , 36 ок, но пальцы лучше не сувать
Если набрать название нашего мотора и слово PDF, то там помимо ампер будет указание VDC и значение порядка 1-5 вольт, однако драйвера управляют моторами не постоянным током, а по принципу шим (кто слышит писк мотора — это работа шим), что это читайте отдельно, но если коротко 36 вольт подаются не постоянно, а вкл/выкл много много раз в секунду
3) Logic signal current — ток для логического сигнала , до 16 мА, то есть до 0,016 А
4) Pulse input frequency — частота логики в кГЦ, до 200 кГЦ (Понадобится при прошивке )
5) Что-то там про сопротивление изоляции, не важно))
Проматываем до таблички управляющих сигналов и тут… 4-5 V для верхнего сигнала PUL (STEP) и DIR!!! А при наличии резисторов можно и 12 вольт и 24, но у нас только 3,25 V.
Что касается сигнала ENA (Enable) его обычно не подключают т.к. из-за него драйвер будет игнорировать сигналы STEP и DIR , зачем оно нам?)) Но кому надо тому надо!)) Перед тем как начнем паять (или кому удобнее собирать брэдборд) листаем наш pdf и находим схемку с сопротивлением пинов драйвера:
Сопротивление 270 Ом, при напряжении 4-5 вольт ток по закону Ома как раз около 16 мА, при 12 и резисторе на 1 кОМ +270 Ом уже 9,5 мА, при 24 и 2кОМ + 270 Ом тоже в районе 10 мА, как того и требует инструкция. На наших платах достаточно 5-ти вольтовых источников питания для концевиков, используем их. Тут нужно загуглить ближайший «Магазин радиотехники» и набрать npn транзисторов и к ним резисторов (dc-dc повышающие преобразователи не прокатят). Стоят они по несколько рублей (а иногда и по рублю), какие именно нужно можно легко подсчитать:
Сопротивление как DIR так и STEP у драйвера 270 Ом, напряжение хотим 4-5V (это напряжение коллектор-эмиттер), а управляющий сигнал порядка 3,25 вольт (это напряжение база-эмиттер) . Под такие цели можно найти много транзисторов, я выберу 2N3904, у которого напряжение база-эмиттер до 6 вольт, а коллектор-эмиттер аж до 40.
На один драйвер понадобится 2 транзистора. Резисторов же нужно аж 2 штуки. Рассчитаем какие нужны:
Т.к. у нас напряжение +5 вольт с платы, а транзисторы снижают напряжение где-то на 0,6 вольт, то при 4,4 вольтах и 270 Ом ток коллектор-эмиттер будет около 16 мА, что хорошо. Смотрим на картинку — база это лапка посередине, к ней подключаем наши 3,25 вольт через резистор номиналом (3,25-0,6)/(0,016/200)=33000 Ом или 33 кОМ, где 3,25 V это напряжение логики, 0,6 V падение напряжение, 0,016 A подсчитанный выше ток, 200 это средний коэффициент усиления (hfe) транзистора с картинки выше. Таким образом нам нужен резистор 33-35 кОМ. Также необходим более мощный резистор на 500-1000 кОМ (1 мегаом), который будет служить стягивающим резистором, получится так:
Осталось совсем немного!! Надо подправить прошивку под наш внешний драйвер: задать частоту, длительность импульса и задержки)) Кто перепиновывал пин — вернуть все обратно. Заходим в Configuration_adv.h, изменяем количество сегментов (у нас ведь теперь хорошие большие драйвера:))
/ Moves (or segments) with fewer steps than this will be joined with the next move
#define MIN_STEPS_PER_SEGMENT 1
Далее устанавливаем задержки для сигнала DIR по PDF файлу драйвера (таблички в начале), у меня это минимум 5 микросекунд, тут её указывают в наносекундах, значит 5000 ns, я поставлю 6000
/**
* Minimum delay before and after setting the stepper DIR (in ns)
* 0 : No delay (Expect at least 10µS since one Stepper ISR must transpire)
* 20 : Minimum for TMC2xxx drivers
* 200 : Minimum for A4988 drivers
* 400 : Minimum for A5984 drivers
* 500 : Minimum for LV8729 drivers (guess, no info in datasheet)
* 650 : Minimum for DRV8825 drivers
* 1500 : Minimum for TB6600 drivers (guess, no info in datasheet)
* 15000 : Minimum for TB6560 drivers (guess, no info in datasheet)
*
* Override the default value based on the driver type set in Configuration.h.
*/
#define MINIMUM_STEPPER_POST_DIR_DELAY 6000
#define MINIMUM_STEPPER_PRE_DIR_DELAY 6000
Очень важная штука — ширина импульса, в табличке пишут что pul не менее 2,5 микросекунд, но лучше я поставлю 5 микросекунд.
/**
* Minimum stepper driver pulse width (in µs)
* 0 : Smallest possible width the MCU can produce, compatible with TMC2xxx drivers
* 0 : Minimum 500ns for LV8729, adjusted in stepper.h
* 1 : Minimum for A4988 and A5984 stepper drivers
* 2 : Minimum for DRV8825 stepper drivers
* 3 : Minimum for TB6600 stepper drivers
* 30 : Minimum for TB6560 stepper drivers
*
* Override the default value based on the driver type set in Configuration.h.
*/
#define MINIMUM_STEPPER_PULSE 5
И конечно же частота импульса. Драйвера способны выдавать до 200 кГц, но мы увеличили длительность импульса в 2 раза, поэтому уменьшаем частоту в 2 раза и оставляем 100 кГц
* Maximum stepping rate (in Hz) the stepper driver allows
* If undefined, defaults to 1MHz / (2 * MINIMUM_STEPPER_PULSE)
* 5000000 : Maximum for TMC2xxx stepper drivers
* 1000000 : Maximum for LV8729 stepper driver
* 500000 : Maximum for A4988 stepper driver
* 250000 : Maximum for DRV8825 stepper driver
* 150000 : Maximum for TB6600 stepper driver
* 15000 : Maximum for TB6560 stepper driver
*
* Override the default value based on the driver type set in Configuration.h.
*/
#define MAXIMUM_STEPPER_RATE 100000
!!!!И ТЕПЕРЬ САМОЕ ВАЖНОЕ!!!
Без чего драйвера не будут работать (а так могут неплохо «шевелиться» и на 3,25 вольт):
Практически для всех больших драйверов тут нужно поменять false на true
// By default pololu step drivers require an active high signal. However, some high power drivers require an active low signal as step.
define INVERT_X_STEP_PIN true
#define INVERT_Y_STEP_PIN false
#define INVERT_Z_STEP_PIN false
#define INVERT_I_STEP_PIN false
#define INVERT_J_STEP_PIN false
#define INVERT_K_STEP_PIN false
#define INVERT_U_STEP_PIN false
#define INVERT_V_STEP_PIN false
#define INVERT_W_STEP_PIN false
#define INVERT_E_STEP_PIN false
Драйвер DM556 — драйвер шагового двигателя с цифровым процессором работающий на современных управляющих алгоритмах STET DIR. В основе устройства реализованы максимальная плавность движения шагового двигателя, высокий отдаваемый момент на валу и методы подавления резонанса (двигатели работают тихо, вибрация меньше). Драйвер шагового двигателя — (анг.) Microstep Driver DM556 (JMC).
Основные функциональные характеристики DM556
-
Поддерживает входное напряжение от 20 до 50 В постоянного тока, с рекомендованным значением 36 Вольт.
-
Максимальное значение выходного тока составляет 5,6 Ампер.
-
Частоту отклика импульса до 200 кГц, что позволяет ему оперативно реагировать на изменения входных сигналов.
-
Устройство обладает хорошими характеристиками вибрации и шума, что делает его подходящим для приложений, где требуется минимальное воздействие на окружающую среду.
-
Имеет функцию подавления резонанса, что обеспечивает оптимальный крутящий момент и стабильную работу.
-
DM556 снижает ток при холостом ходе, что может снизить энергопотребление и повысить эффективность работы.
-
Устройство подходит для управления 2-фазными и 4-фазными двигателями с током фазы до 5,6 Ампер.
-
Поддерживает режимы управления PUL/DIR, что позволяет использовать его с различными системами управления двигателем.
-
Шаговый драйвер имеет защиту от перегрева и перегрузки по току, что может обеспечить безопасность и защиту от повреждений.
-
Поддерживает режим микрошага с 15 режимами работы и максимальным значением 25600 импульсов на оборот, что позволяет достичь высокой точности управления двигателем.
ВАЖНО: Переключатели на драйвере настраивайте только тогда, когда драйвер полностью отключен от питания.
Подключение и настройка драйвера DM556 (схема)
Для подключения драйвера DM556 к вашей системе управления двигателем, следуйте инструкциям производителя и учитывайте следующие общие рекомендации:
-
Напряжение питания: Подключите источник питания с напряжением в диапазоне от 20 до 50 В постоянного тока, с рекомендованным значением 36 Вольт, к соответствующим контактам на драйвере.
-
Подключение двигателя: Подключите ваш двигатель к выходам драйвера DM556. Обычно это делается с использованием соответствующих контактов, таких как A+, A-, B+ и B-, в зависимости от типа двигателя и его фазности. Убедитесь, что правильно подключаете фазы и контакты в соответствии с требованиями вашего двигателя и инструкциями производителя драйвера.
-
Управляющие сигналы: Подключите управляющие сигналы к соответствующим контактам устройства. Обычно это сигналы PUL (пульсовый сигнал) и DIR (направление вращения), которые используются для управления скоростью и направлением вращения двигателя. Убедитесь, что правильно подключаете эти сигналы в соответствии с требованиями вашей системы управления двигателем.
-
Микрошаг: Если вы планируете использовать функцию микрошага, настройте соответствующий режим микрошага, используя указанные в инструкциях производителя настройки или программное обеспечение управления, если таковое предусмотрено.
-
Защита: Убедитесь, что соответствующие функции защиты от перегрева, перегрузки по току и других непредвиденных ситуаций настроены и подключены в соответствии с требованиями вашей системы и инструкциями производителя драйвера.
-
Тестирование и настройка: После подключения проведите тестирование и настройку драйвера DM556 в соответствии с инструкциями производителя и требованиями вашей системы управления двигателем. Убедитесь, что двигатель работает правильно, и все функции драйвера настроены и функционируют в соответствии с вашими ожидания.
Почему выгодно купить драйвер DM556 в нашем магазине
DM556 драйвер, доступный в магазине naStanok, представляет собой высокотехнологичное устройство управления шаговыми двигателями. Он работает от постоянного напряжения в диапазоне от 24 до 50 В и поддерживает нагрузку в виде шаговых двигателей с рабочим током до 4 А, с возможностью кратковременного изменения тока до 5,6 А в режиме пика. Прибор предлагает 16 режимов микрошага, что позволяет более точное и гладкое движение вала двигателя. Он также обладает защитными функциями, такими как автоматическое снижение тока в случае перегрузки и автоматическое отключение при отсутствии сигналов управления в течение 0,5 секунды, что способствует безопасной работе системы.
DM556 драйвер отличается высоким качеством и надежностью, поскольку производится оригинальным производителем. Он идеально подходит для использования в системах ЧПУ с шаговыми двигателями типа Nema, и его приобретение в магазине naStanok позволит минимизировать потери времени и затраты на замену электронной платы в случае ее выхода из строя. Мы предлагаем драйвер по приемлемым ценам, обеспечивая оптимальное соотношение цены и качества.
При покупке DM556 драйвера вы получите высокотехнологичное устройство, способное обеспечить плавное движение шаговых двигателей, снижение вибраций и оптимальный крутящий момент. Драйвер легко настраивается и имеет защитные функции, обеспечивающие безопасную и надежную работу системы. Он подходит для использования с шаговыми двигателями Nema23, Nema34 и предлагается по приемлемым ценам. Для предотвращения возможных простоев вашего предприятия вам рекомендуется приобрести драйверы с запасом в магазине naStanok.ru. Это позволит минимизировать потери времени, так как монтаж и замена электронной платы производятся легко и быстро, без необходимости привлекать дополнительных специалистов.