
Валерий Леонидович Задорожный, который возглавляет на НЭВЗе группу электровозов переменного тока отдела серийной продукции, подготовил по нашей просьбе статью, посвящённую электровозам с поосным регулированием силы тяги, предназначенную для публикации в корпоративном журнале Трансмашхолдинга. К большому сожалению, при подготовке к публикации текст пришлось значительно сократить. Формат блога, в отличие от журнала, не налагает ограничений на объём материала и потому мы приняли решение опубликовать здесь полную версию статьи. Предупреждаем, что, будучи написанной специалистом, она рассчитана на подготовленную публику.
Будем благодарны за отзывы: нам важно знать, интересны ли такие тексты нашим посетителям или же стоит ограничиться более популярными материалами.
Пользуясь случаем, поздравляем Валерия Леонидовича с присвоением почётного звания «Лучший работник промышленного комплекса Дона».

Главный заказчик продукции Трансмашхолдинга – ОАО «РЖД», постоянно повышает требования к эффективности работы железнодорожного транспорта. В этой связи компания постоянно проводит работу по совершенствованию своей продукции. В частности, НЭВЗ совместно с ВЭлНИИ разработал и приступил к производству модифицированных электровозов серии «Ермак» – 2(3,4)ЭС5К с поосным регулированием силы тяги.
Теория
Сердце любого электровоза – его тяговый двигатель. Двигатели, которые могут быть использованы в качестве тяговых на электровозе, должны удовлетворять как минимум двум требованиям. Прежде всего они должны допускать возможность регулирования в широких пределах частоты вращения. Это позволяет изменять скорость движения поезда. Кроме того, необходимо иметь возможность регулировать в широком диапазоне силу тяги, т. е. вращающий момент, развиваемый двигателем. Так, двигатели электровоза должны обеспечивать значительную силу тяги во время трогания поезда, его разгона, при преодолении крутых подъемов и т. п. и снижать ее при более легких условиях движения.
С точки зрения организации движения, казалось бы, желательно, чтобы поезда независимо от изменения сопротивления движению перемещались с постоянной скоростью или эта скорость снижалась бы незначительно. Зависимость между силой тяги, развиваемой двигателями локомотива, и скоростью его движения называют тяговой характеристикой. Тяговые характеристики существуют 2-х видов – мягкая и жесткая.
В случае жесткой характеристики мощность, потребляемая двигателями на крутых подъемах, возрастает пропорционально увеличению силы тяги. Резкое увеличение потребляемой мощности приводит к необходимости повышения мощности как самих двигателей, так и тяговых подстанций, увеличения площади сечения контактной подвески, что связано с затратами денежных средств и дефицитных материалов.
Характеристику двигателя, при которой с увеличением сопротивления движению поезда автоматически снижается его скорость, называют мягкой. Двигатель с такой тяговой характеристикой работал бы при неизменной мощности. Однако при движении тяжелых составов на крутых подъемах, когда необходима большая сила тяги, поезда перемещались бы с очень низкой скоростью, тем самым резко ограничивая пропускную способность участка железной дороги.
На российских железных дорогах в качестве тяговых двигателей на электровозах в подавляющем большинстве случаев используются двигатели постоянного тока с последовательным возбуждением, обладающие мягкой тяговой характеристикой. Такие двигатели при больших нагрузках вследствие снижения скорости потребляют меньшую мощность из системы электроснабжения. Однако двигатели последовательного возбуждения имеют весьма существенный недостаток — электровозы с такими двигателями склонны к боксованию, иногда переходящему в разносное. Этот недостаток особенно резко проявился после того, когда масса поезда стала ограничиваться расчетным коэффициентом сцепления. К недостаткам тяговых двигателей последовательного возбуждения относится и то, что они не могут автоматически переходить в режим электрического торможения: для этого необходимо предварительно изменить способ возбуждения тягового двигателя.
Двигатели постоянного тока с независимым возбуждением обладают жесткой характеристикой, которая в значительно большей мере способствует прекращению боксования, так как в этом случае сила тяги резко снижается даже при небольшом скольжении и имеется больше шансов на восстановление сцепления.
Как показали экспериментальные исследования, проведённые ВНИИЖТ, МИИТ, ВЭлНИИ, ОМИИТ на электровозах типа ВЛ22М, ВЛ60РН, ВЛ80РН, оборудованных различными системами независимого возбуждения, увеличение силы тяги и торможения достигает 15ч-20% по сравнению с серийно выпускаемыми машинами с последовательным возбуждением тяговых электродвигателей (ТЭД).
Исследования, проведенные в 80-е годы, показали, что наилучшими противобоксовочными и противоюзными свойствами обладает групповая схема питания тяговых двигателей с индивидуальным (поосным) регулированием возбуждения каждого ТЭД по сравнению с индивидуальным регулированием напряжения на якорных обмотках и групповом питании обмоток возбуждения ТЭД. Первая была применена на электровозе ВЛ85 № 061, вторая — на электровозе ВЛ80Р № 1669.
Однако применяемая в 80-х годах на серийно выпускаемых электровозах элементная база не позволила реализовать необходимые алгоритмы управления. Использование на указанных экспериментальных машинах бортовых микропроцессорных систем управления показало, что только с применением именно такой техники можно успешно реализовать все достаточно сложные законы регулирования многомоторного автоматизированного тягового электропривода электровоза. Проведённые испытания указанных электровозов показали значительные преимущества микропроцессорных систем управления перед традиционными, серийно выпускаемыми промышленностью, а также наметили ряд задач дальнейшего совершенствования алгоритмов управления.
Таким образом, комплексная задача разработки электровоза переменного тока с независимым возбуждением тяговых двигателей и поосным управлением силой тяги могла быть решена только с появлением микропроцессорной системы управления на серийных электровозах.
Изготовление электровозов с поосным регулированием 3ЭС5К №434 и 4ЭС5К №№001-003
В 2013году в соответствии с «Техническим решением о совершенствовании конструкции серийно выпускаемых электровозов серии ЭП1(М, П), 2(3)ЭС5К, 2ЭС4К» утвержденным руководством ЗАО «Трансмашхолдинг» и ОАО «РЖД», ОАО «ВЭлНИИ» разработал конструкторскую документацию, а ООО «ПК «НЭВЗ» по ней изготовил электровоз 3ЭС5К №434.
В 2014г в соответствии с «Решением о принципах построения шестнадцатиосного магистрального грузового электровоза переменного тока 4ЭС5К производства ООО «ПК «НЭВЗ»», утвержденным руководством ЗАО «Трансмашхолдинг» и ОАО «РЖД», ОАО «ВЭлНИИ» разработал конструкторскую документацию, а ООО «ПК «НЭВЗ» по ней изготовил электровозы 4ЭС5К №№001-003
На указанных электровозах применены следующие конструкторские и схемные решения:
Независимое возбуждение тяговых двигателей в режимах «Тяга» и «Рекуперация»:
Поскольку тяговые двигатели постоянного тока на отечественных электровозах изначально разрабатывались для использования в сериесном (последовательном) включении, их обмотки возбуждения рассчитаны на значительные токи, до 1000 А. Поэтому для управления и удешевления автономного возбудителя на электровозах 3ЭС5К №434 и 4ЭС5К №№001-003 с независимым возбуждением, обмотки возбуждения всех двигателей секции подключаются последовательно к общей двухполупериодной выпрямительной установке возбуждения ВУВ- 257, а распределение нагрузок для каждого двигателя производится индивидуальной подрегулировкой возбуждения при помощи управляемых шунтирующих устройств, выполненных на тиристорах и резисторах, подключенных параллельно обмоткам возбуждения. Эти устройства работают в широтно-импульсном режиме с частотой пульсации выпрямленного тока и производят «отпитку» тока возбуждения, воздействуя таким образом на ток якоря, т.е. выполняют функцию корректировки параметров магнитной системы каждого двигателя.

Выпрямительная установка возбуждения ВУВ — 257
Технические данные:
Номинальный продолжительный выпрямленный ток (среднее значение), А — 850
Ток выпрямленный 20-минутного режима (с холодного состояния) А, не более — 1100
Ток выпрямленный 5-ти минутного режима (с холодного состояния), А, не более — 1300
Номинальное напряжение питания переменного тока (эффективное значение), В — 2х270
Напряжение силовых цепей:
— относительно “земли”, В — 3600
— относительно цепей управления, В — 1500
Поосное регулирование силы тяги
Для индивидуального управления тяговыми двигателями применены:
А) микропроцессорная система управления и диагностики МСУД-015 для управления тяговым приводом, аппаратами цепей управления и защиты электровоза, диагностики основного оборудования.
МСУД-015 реализует расширенные функции диагностирования оборудования электровоза 2(3, 4)ЭС5К и поосное регулирование тяговыми электродвигателями (далее ТЭД), в том числе в режиме тяги с независимым возбуждением ТЭД.
В состав аппаратных средств МСУД-015 головной секции входят:
-блок управления БУ-006;
-блок управления БУ-006-01;
-блок индикации ВС-3742 фирмы «GERSYS»;
-блок сигнализации БС-008.

ВС-3742

БС-008
В состав аппаратных средств МСУД-015-01 бустерной секции входят:
— блок управления БУ-006;
— блок управления БУ-006-01.
БУ-006 и БУ-006-01 предназначены для выполнения арифметических, логических операций, обработки сигналов датчиков, формирования и усиления управляющих сигналов и обеспечения обмена информацией между составными частями МСУД-015.
БИ ВС -3742 предназначен для вывода машинисту графической и звуковой информации о заданных и истинных величинах, контролируемых параметрах, состоянии оборудования и системы управления, режиме работы оборудования и т.д., а также ввода команд с многофункциональной клавиатуры.
БС-008 предназначен для визуального отображения машинисту (при помощи светодиодных индикаторов) обобщенной информации о состоянии оборудования электровоза.
В тяговом и тормозном режимах МСУД-015 обеспечивает:
— управление тяговым электроприводом и оборудованием в режимах ручного и автоматического регулирования;
— поддержание, заданной машинистом, силы тяги в пределах ограничений по мощности до достижения заданной скорости с последующим ее поддержанием (при отсутствии ускорения движения за счет уклона пути); — ограничение тока тяговых двигателей при достижении максимально допустимого значения; — защиту от боксования путем обеспечения возможности перераспределения между осями тяговых усилий с целью сохранения общей силы тяги электровоза на заданном уровне; — выравнивание токов по тяговым электродвигателям при независимом возбуждении в режиме тяги;
— поддержание заданной машинистом тормозной силы с учетом ограничений тормозной характеристики до достижения заданной скорости с последующим ее поддержанием (на спусках); — ограничение тока якорей и тока возбуждения тяговых двигателей при достижении максимально допустимых значений; — защиту от юза путем обеспечения возможности перераспределения между осями тормозных усилий с целью сохранения общей силы торможения электровоза на заданном уровне.
Расширенные функции диагностирования и управления МСУД-015 всем оборудованием электровоза, независимо от режимов движения, обеспечивают выполнение следующих функций:
— непрерывный автоматический контроль состояния агрегатов и оборудования электровоза, включая главный выключатель, токоприемники, тяговые электродвигатели, сглаживающие реакторы, блок балластных резисторов, вспомогательные машины, аппараты защиты;
— запрет сбора электрической цепи тягового режима в случае несоответствия параметров плотности тормозной магистрали поезда, предусмотренных нормативными документами величинам;
— получение и обработка диагностической информации от блоков диагностики ВИУ (ВИП);
— управление оборудованием электровоза, включая вспомогательные машины, аппараты защиты и другие агрегаты;
— выявление отклонений в работе контролируемого оборудования путем оценки на допустимость значений параметров, полученных от датчиков этого оборудования;
— визуальное и звуковое оповещение, а также по запросу на дисплее о выявленных отклонениях в работе оборудования в режимах «штатный», «аварийный»;
— отображение текущего состояния контролируемых параметров на дисплее;
— сбор диагностической информации в штатном режиме каждые 100 мс (независимо от состояния оборудования) в соответствии с утвержденным «Перечнем диагностируемых параметров электровоза 2ЭС5К (3ЭС5К) с расширенной системой бортовой диагностики состояния оборудования и дистанционной передачей данных в депо (для изготовления опытного электровоза)»;
— формирование массива (дампа) данных в моменты выявления отклонений от нормы в работе оборудования содержащим соответствующую диагностическую информацию с интервалом времени 10 мс в течении 1 с до 0,1 с после события (всего 110 записей на единичный факт выявления отклонений от нормы в работе оборудования) и передачу полученного массива данных в подсистему регистрации и передачи данных для записи параметров электрических процессов в энергонезависимую память и обеспечения возможности ремонтному персоналу дальнейшего анализа выявленных фактов отклонений от нормы в работе оборудования и определения причин их возникновения;
— передачу собранной диагностической информации в подсистему регистрации и передачи данных для хранения ее в энергонезависимой памяти и передачи по беспроводному каналу связи обобщенной информации об электровозе;
— подключение внешнего электронного носителя для считывания данных, зарегистрированных в памяти, для последующей расшифровки и архивирования в депо.
Б) выпрямительно-инверторное устройство ВИУ-4000-2М для реализации поосного регулирования тяги на электровозах 2(3, 4)ЭС5К посредством преобразования однофазного переменного тока частоты 50 Гц в постоянный (пульсирующий) ток с обеспечением плавного индивидуального регулирования выпрямленных напряжений питания двух тяговых двигателей в режиме тяги и для преобразования постоянного тока в однофазный переменный частотой 50 Гц в режиме рекуперативного торможения. Каждый канал ВИУ- 4000-2М получает сигналы управления от отдельного канала МСУД-015.
Конструктивно ВИУ состоит из трёх блоков: блока силового (БС), блока питания (БП) и блока диагностики (БД).
Блок силовой (БС) состоит из двух абсолютно идентичных каналов — №1 и №2.

Блок силовой (БС). Канал № 1
Блок диагностики (БД) предназначен для:
— контроля состояния тиристоров плеч силового блока (БС);
— контроля транзисторов блока питания (БП) и блока формировавния импульсов (БФИ);
— подачи запускающих импульсов при диагностировании работы блоков управления СФИ. Блок диагностики подключается к МСУД электровоза по отдельному СAN-каналу.

Лицевая панель блока диагностики
Блок питания (БП) обеспечивает питанием блоки управления СФИ. БП питается от обмотки собственных нужд 380В тягового трансформатора электровоза. БП представляет собой транзисторный стабилизатор напряжения с параллельным регулирующим элементом, который позволяет с заданной точностью поддерживать постоянное напряжение на выходе при изменении входного напряжения в пределах от 250 до 500 В.

Лицевая панель блока питания
В) Разъединитель с дистанционным управлением Р-45 — для индивидуального оперативного дистанционного отключения неисправных каналов силовой цепи (Тяговый тр-р – ВИУ- ТЭД). В качестве привода используется двигатель с винтовой передачей типа АТЛ20.
Эксплуатация электровозов с поосным регулированием 3ЭС5К №434 и 4ЭС5К №№001-003
Электровозы 4ЭС5К с 19 января 2015 года эксплуатируются в депо Смоляниново Дальневосточной железной дороги. Эксплуатация осуществляется в условиях самого сложного природно-ландшафтного рельефа сети РЖД на участке Смоляниново — Находка, который характеризуется наличием горно-перевальных участков с крутыми подъемами и уклонами и участками пути с кривыми малого радиуса». Эксплуатация проходит в нормальном режиме, все выявленные замечания оперативно устраняются представителями Новочеркасского электровозостроительного завода.
Электровоз 3ЭС5К №434 с сентября 2015 года эксплуатируется в депо Чита Забайкальской железной дороги.
Вывод
Применение поосного управления силой тяги совместно с системой адаптации по сцеплению создает перераспределение нагрузок между колесно-моторными блоками, позволяющее поддерживать реализуемую силу тяги электровоза практически на заданном уровне. При этом снижается расход песка на подсыпку при буксовании (юзе), уменьшается износ бандажей колесных пар, улучшается использование заложенной мощности электрооборудования.
Содержание страницы
- 1 Руководство по эксплуатации электровозов:
- 2 Руководство по эксплуатации тепловозов:
- 3 Руководство по эксплуатации электропоездов:
- 4 Руководство по эксплуатации оборудования локомотивов:
Руководство по эксплуатации электровозов:
Руководство по эксплуатации электровозов ВЛ85.
Руководство по эксплуатации электровозов ВЛ60пк и ВЛ60к.
Руководство по эксплуатации электровоза ЭП2К ЭП2К.00РЭ.
Руководство по эксплуатации 2ЭС10.00.000.000 РЭ.
Руководство по эксплуатации электровоза ВЛ10К. Модернизация с продление срока службы 263.437.00.00.000 РЭ.
Руководство по эксплуатации 2ЭС4К ИДМБ.661141.004 РЭ.
Руководство по эксплуатации ЭП20 3ТС.085.003 РЭ.
Руководство по эксплуатации 2ЭС6.00.000.000 РЭ.
Руководство по эксплуатации электровоза 3ЭС5К ИДМБ.661142.009РЭ.
Руководство по эксплуатации электровозов ВЛ10 и ВЛ10У.
Руководство по эксплуатации электровоз ВЛ11.
Руководство по эксплуатации электровозов ВЛ11М.
Руководство по эксплуатации электровоза ВЛ80с.
Руководство по эксплуатации электровоза ВЛ80р.
Руководство по эксплуатации электровоза ВЛ80т.
Руководство по эксплуатации тепловозов:
Руководство по эксплуатации ТЭМ18ДМ.
Руководство по эксплуатации и обслуживанию тепловоза ТЭМ2.
Руководство по эксплуатации и обслуживанию ТЭМ2У.
Руководство по эксплуатации тепловоза ТЭП70.00 РЭ-1.
Руководство по эксплуатации тепловоза ТЭП70БС.
Руководство по эксплуатации 2ТЭ116У.00.00.008-01.
Руководство по эксплуатации 2ТЭ25А РЭ.
Руководство по эксплуатации 2ТЭ25К РЭ.
Руководство по эксплуатации 2ТЭ25КМ
Руководство по эксплуатации ТЭМ18ДМ
Руководство по эксплуатации и обслуживанию тепловоза ТГМ6А.
Руководство по эксплуатации тепловоза 2ТЭ10М.
Руководство по эксплуатации тепловоза 2ТЭ10МК.
Руководство по эксплуатации тепловоза 2ТЭ10В.
Руководство по эксплуатации электропоездов:
Руководство по эксплуатации электропоезда ЭР2 и ЭР2Р.
Руководство по эксплуатации электропоезд ЭД9М 305.00.00.000-01 РЭ.
Руководство по эксплуатации электропоезда ЭР9П.
Руководство по эксплуатации электропоезда ЭР9М.
Руководство по эксплуатации оборудования локомотивов:
Руководство по эксплуатации токоприемника AX 023 BU LT и AX 024 BM LT (электровоза ЭП20).
Руководство по эксплуатации «Барс-6М».
Руководство по эксплуатации комплекса «БЛОК».
Руководство по эксплуатации Радиостанция РВС-01.
Руководство по эксплуатации системы видео-регистрации «Кварц».
Инструкция по токосъёмному устройству UZB70-24U1.
Руководство по эксплуатации регулятора числа оборотов ЭРЧМ30Т3.00.000-6 РЭ
Руководство по эксплуатации системы МСУ-ТП 2тэ116.
Руководство по эксплуатации системы УСАВП ЧС8.
Руководство по эксплуатации системы УСАВП ЧС200.
Эксплуатационная документация аппаратуры МСУД.
Руководство по эксплуатации дизеля-генератора 1А-9ДГ.
Руководство по эксплуатации фильтров очистки масла Болл-Кирх.
Руководство по эксплуатации токоприемника ТАсС-16-02 6ТС.260.016-02РЭ.
Руководство по эксплуатации системы САУВ электровоза ВЛ80с Э2681.00.00-01РЭ.
Руководство по эксплуатации дизель-генератора 1-ПДГ4Д.
Руководство по эксплуатации системы сигнализации и автоматического пожаротушения для электровозов СПСТ Эл4-04. ЭЛ1826.00.00 РЭ
Руководство по эксплуатации ЖТЛИ 563337.024 РЭ. Аккумулятор KL 125P (НК 125П) и аккумуляторные батареи.
Руководство по эксплуатации 677.000 РЭ. Демпферы гидравлические подвижного состава железных дорог.
Руководство по эксплуатации МКЖИ.673116.001РЭ. Конденсаторы типа КПС.
Руководство по эксплуатации ЖУИК.673216.001 РЭ. Конденсатор КПС.
Техническое описание и инструкция по эксплуатации БФИР.670205.227 ТО. Ограничитель перенапряжений нелинейный типа ОПН-25М УХЛ1.
Техническое описание и инструкция по эксплуатации ВРЗ.648.001 ТО. Батареи аккумуляторные свинцовые типов 32 ТН-450-У2, 48ТН-450-У2 и 48ТН-350-У2.
Руководство по эксплуатации ИДМБ.421455.001 РЭ (3ТС.676.004 РЭ). Микропроцессорная система управления оборудования электровозов (МСУД-Н).
Технические условия TSh 11/05-060:2006. Трансформатор тяговый типа ОНДЦЭ-4350/25П-У2.
Инструкция по эксплуатации БЕИВ.641453.001 ИЭ. Выключатель автоматический Типа ВА04-36, ВА06-36
Руководство по эксплуатации стенда для проверки панели питания ПП-720. Модель СРНП-ПП720.
Руководство по эксплуатации БЕИВ.490416.001 РЭ. Регулятор давление АК-11
Руководство SG104122TRU. Выключатель быстродействующий постоянного тока UR26 64T.
Руководство по эксплуатации ИБЦЖ.674153.001РЭ. Выключатель вакуумный однополюсной ВБО-25-20/630УХЛ1.
Техническое описание, инструкция по эксплуатации. Выключатель однополюсный воздушный ВОВ-25-4М.
Руководство по эксплуатации АРКИ.421455.002 РЭ. Стенд для проверки аппаратуры МСУД-Н и схемных блоков СПА-002.
Руководство по эксплуатации переключатель кулачковый двухпозиционный ПКД-142ЭТ.000 РЭ
Руководство по эксплуатации Р-25 ЭТ, Р-45 ЭТ, РШК-56 ЭТ, РШК-095 ЭТ Р-25ЭТ.000 РЭ
Руководство по эксплуатации реле перегрузки РТ ЭТ.000 РЭ
Руководство по эксплуатации реле термозащитное РТЗ-032 ЭТ.000 РЭ
Руководство по эксплуатации реле заземления РЗ-303 ЭТ.000 РЭ
Руководство по эксплуатации реле контроля земли РКЗ-306ЭТ.000 РЭ
Руководство по эксплуатации ТК 3207 РЭ. Турбокомпрессор ТК32.
Руководство по эксплуатации ТК41В 4121.00.000РЭ. Турбокомпрессор ТК41В.
Руководство по эксплуатации ЭСУВТ.01.00.000 РЭ «Система электронного управления подачей топлива ЭСУВТ.01»
Микропроцессорная система управления и диагностики для электровозов переменного тока МСУД-015 предназначена для управления тяговым приводом (электровоза переменного тока с коллекторными двигателями) и аппаратами цепей управления электровоза.
МСУД обеспечивает расширенные функции диагностирования оборудования электровоза 2ЭС5К (3ЭС5К, 4ЭС5К) и реализацию поосного управления тяговыми электродвигателями (ТЭД), в том числе в режиме тяги с независимым возбуждением ТЭД.
В состав аппаратных средств МСУД-015 головной секции входят:
— блок управления БУ-006 АРКИ.656363.006;
— блок управления БУ-006-01 АРКИ.656363.006-01;
— блок индикации (далее БИ) типа ВС3841 (BC3742, БС04);
— блок сигнализации БС-008 АРКИ.656122.008.
В состав аппаратных средств МСУД-015-01 бустерной секции входят:
— блок управления БУ-006 АРКИ.656363.006;
— блок управления БУ-006-01 АРКИ.656363.006-01.
БУ-006 и БУ-006-01 предназначены для выполнения арифметических, логических операций, обработки сигналов датчиков, формирования и усиления управляющих сигналов и обеспечения обмена информацией между составными частями МСУД-015.
БИ предназначен для вывода машинисту графической и звуковой информации о заданных и истинных величинах, контролируемых параметрах, состоянии оборудования и системы управления, режиме работы оборудования и т.д., а также ввода команд с многофункциональной клавиатуры.
БС-008 предназначен для визуального отображения (при помощи светодиодных индикаторов) обобщенной информации о состоянии оборудования электровоза.





Имеется сертификат соответствия ФСТЭК России рег. № 3943 от 23 мая 2018 г. для программного обеспечения системы, действителен до 23 мая 2021 г. (копия сертификата предоставляется по запросу).
Микропроцессорная система управления и диагностики оборудования электровозов (МСУД-Н)
руководство по эксплуатации
ИДМБ.421455.001 РЭ
(3ТС.676.004 РЭ)
скачать по ссылке: http://catcut.net/8Mix РЭ МСУД-Н.
Микропроцессорная система управления и диагностики оборудования электровозов МСУД-Н
руководство по эксплуатации ИДМБ.421455.001 РЭ2 (3ТС.676.004РЭ2)
скачать по ссылке: РЭ МСУД-Н (ИДМБ.421455.001РЭ2).
Стенд поверки аппаратуры МСУД-Н и съемных блоков СПА-002
руководство по эксплуатации
АРКИ.421455.002 РЭ
скачать по ссылке: РЭ СПА-002.
Микропроцессорная система управления и диагностики МСУД-001
для грузового электровоза постоянного тока
руководство по эксплуатации
АРКИ.421455.001 РЭ
скачать по ссылке: РЭ-МСУД-001-(2ЭС4К).

Содержание страницы
- 1 Руководство по эксплуатации электровозов:
- 2 Руководство по эксплуатации тепловозов:
- 3 Руководство по эксплуатации электропоездов:
- 4 Руководство по эксплуатации оборудования локомотивов:
Руководство по эксплуатации электровозов:
Руководство по эксплуатации электровозов ВЛ85.
Руководство по эксплуатации электровозов ВЛ60пк и ВЛ60к.
Руководство по эксплуатации электровоза ЭП2К ЭП2К.00РЭ.
Руководство по эксплуатации 2ЭС10.00.000.000 РЭ.
Руководство по эксплуатации электровоза ВЛ10К. Модернизация с продление срока службы 263.437.00.00.000 РЭ.
Руководство по эксплуатации 2ЭС4К ИДМБ.661141.004 РЭ.
Руководство по эксплуатации ЭП20 3ТС.085.003 РЭ.
Руководство по эксплуатации 2ЭС6.00.000.000 РЭ.
Руководство по эксплуатации электровоза 3ЭС5К ИДМБ.661142.009РЭ.
Руководство по эксплуатации электровозов ВЛ10 и ВЛ10У.
Руководство по эксплуатации электровоз ВЛ11.
Руководство по эксплуатации электровозов ВЛ11М.
Руководство по эксплуатации электровоза ВЛ80с.
Руководство по эксплуатации электровоза ВЛ80р.
Руководство по эксплуатации электровоза ВЛ80т.
Руководство по эксплуатации тепловозов:
Руководство по эксплуатации ТЭМ18ДМ.
Руководство по эксплуатации и обслуживанию тепловоза ТЭМ2.
Руководство по эксплуатации и обслуживанию ТЭМ2У.
Руководство по эксплуатации тепловоза ТЭП70.00 РЭ-1.
Руководство по эксплуатации тепловоза ТЭП70БС.
Руководство по эксплуатации 2ТЭ116У.00.00.008-01.
Руководство по эксплуатации 2ТЭ25А РЭ.
Руководство по эксплуатации 2ТЭ25К РЭ.
Руководство по эксплуатации 2ТЭ25КМ
Руководство по эксплуатации ТЭМ18ДМ
Руководство по эксплуатации и обслуживанию тепловоза ТГМ6А.
Руководство по эксплуатации тепловоза 2ТЭ10М.
Руководство по эксплуатации тепловоза 2ТЭ10МК.
Руководство по эксплуатации тепловоза 2ТЭ10В.
Руководство по эксплуатации электропоездов:
Руководство по эксплуатации электропоезда ЭР2 и ЭР2Р.
Руководство по эксплуатации электропоезд ЭД9М 305.00.00.000-01 РЭ.
Руководство по эксплуатации электропоезда ЭР9П.
Руководство по эксплуатации электропоезда ЭР9М.
Руководство по эксплуатации оборудования локомотивов:
Руководство по эксплуатации токоприемника AX 023 BU LT и AX 024 BM LT (электровоза ЭП20).
Руководство по эксплуатации «Барс-6М».
Руководство по эксплуатации комплекса «БЛОК».
Руководство по эксплуатации Радиостанция РВС-01.
Руководство по эксплуатации системы видео-регистрации «Кварц».
Инструкция по токосъёмному устройству UZB70-24U1.
Руководство по эксплуатации регулятора числа оборотов ЭРЧМ30Т3.00.000-6 РЭ
Руководство по эксплуатации системы МСУ-ТП 2тэ116.
Руководство по эксплуатации системы УСАВП ЧС8.
Руководство по эксплуатации системы УСАВП ЧС200.
Эксплуатационная документация аппаратуры МСУД.
Руководство по эксплуатации дизеля-генератора 1А-9ДГ.
Руководство по эксплуатации фильтров очистки масла Болл-Кирх.
Руководство по эксплуатации токоприемника ТАсС-16-02 6ТС.260.016-02РЭ.
Руководство по эксплуатации системы САУВ электровоза ВЛ80с Э2681.00.00-01РЭ.
Руководство по эксплуатации дизель-генератора 1-ПДГ4Д.
Руководство по эксплуатации системы сигнализации и автоматического пожаротушения для электровозов СПСТ Эл4-04. ЭЛ1826.00.00 РЭ
Руководство по эксплуатации ЖТЛИ 563337.024 РЭ. Аккумулятор KL 125P (НК 125П) и аккумуляторные батареи.
Руководство по эксплуатации 677.000 РЭ. Демпферы гидравлические подвижного состава железных дорог.
Руководство по эксплуатации МКЖИ.673116.001РЭ. Конденсаторы типа КПС.
Руководство по эксплуатации ЖУИК.673216.001 РЭ. Конденсатор КПС.
Техническое описание и инструкция по эксплуатации БФИР.670205.227 ТО. Ограничитель перенапряжений нелинейный типа ОПН-25М УХЛ1.
Техническое описание и инструкция по эксплуатации ВРЗ.648.001 ТО. Батареи аккумуляторные свинцовые типов 32 ТН-450-У2, 48ТН-450-У2 и 48ТН-350-У2.
Руководство по эксплуатации ИДМБ.421455.001 РЭ (3ТС.676.004 РЭ). Микропроцессорная система управления оборудования электровозов (МСУД-Н).
Технические условия TSh 11/05-060:2006. Трансформатор тяговый типа ОНДЦЭ-4350/25П-У2.
Инструкция по эксплуатации БЕИВ.641453.001 ИЭ. Выключатель автоматический Типа ВА04-36, ВА06-36
Руководство по эксплуатации стенда для проверки панели питания ПП-720. Модель СРНП-ПП720.
Руководство по эксплуатации БЕИВ.490416.001 РЭ. Регулятор давление АК-11
Руководство SG104122TRU. Выключатель быстродействующий постоянного тока UR26 64T.
Руководство по эксплуатации ИБЦЖ.674153.001РЭ. Выключатель вакуумный однополюсной ВБО-25-20/630УХЛ1.
Техническое описание, инструкция по эксплуатации. Выключатель однополюсный воздушный ВОВ-25-4М.
Руководство по эксплуатации АРКИ.421455.002 РЭ. Стенд для проверки аппаратуры МСУД-Н и схемных блоков СПА-002.
Руководство по эксплуатации переключатель кулачковый двухпозиционный ПКД-142ЭТ.000 РЭ
Руководство по эксплуатации Р-25 ЭТ, Р-45 ЭТ, РШК-56 ЭТ, РШК-095 ЭТ Р-25ЭТ.000 РЭ
Руководство по эксплуатации реле перегрузки РТ ЭТ.000 РЭ
Руководство по эксплуатации реле термозащитное РТЗ-032 ЭТ.000 РЭ
Руководство по эксплуатации реле заземления РЗ-303 ЭТ.000 РЭ
Руководство по эксплуатации реле контроля земли РКЗ-306ЭТ.000 РЭ
Руководство по эксплуатации ТК 3207 РЭ. Турбокомпрессор ТК32.
Руководство по эксплуатации ТК41В 4121.00.000РЭ. Турбокомпрессор ТК41В.
Руководство по эксплуатации ЭСУВТ.01.00.000 РЭ «Система электронного управления подачей топлива ЭСУВТ.01»
23
ИДМБ.661141.004
РЭ5
(3ТС.000.003
РЭ5)
Настоящее
руководство по эксплуатации (РЭ)
предназначено для изучения и эксплуатации
аппаратуры микропроцессорной системы
управления и диагностики (МСУД), блоков
управления преобразователем возбуждения
(ПВ), панелей, блоков диодов, шунтирующих
устройств и другого электронного
оборудования, входящего в состав
электрооборудования магистрального
грузового электровоза
постоянного тока с коллекторными
тяговыми двигателями
2ЭС4К и содержит:
-
назначение;
-
структуру;
-
технические
характеристики; -
алгоритмы
функционирования;
—
сведения, необходимые для правильного
обращения и технического обслуживания,
обеспечивающие сохранение технических
характеристик аппаратуры в течение
всего срока эксплуатации.
1 Электронное
оборудование
1.1 Аппаратура
управления МСУД-001
1.1.1 Назначение
Микропроцессорная
система управления и диагностики (далее
по тексту «МСУД-001») предназначена для
управления общеэлектровозной аппаратурой,
контакторной аппаратурой цепей тяговых
двигателей и цепей собственных нужд,
сбора и обработки информации с органов
управления и датчиков (контроллер
машиниста, выключатели, блокировки реле
и контакторов, датчики температуры и
т.д.) электровоза 2ЭС4К, выдачи заданий
преобразователям собственных нужд
(ПСН) и возбуждения (ПВ), реализации
режима автоведения, а также для
диагностирования состояния оборудования
электровоза с выполнением функций его
защиты, выдачи соответствующей информации
на дисплей и записи ее в съемный
энергонезависимый накопитель.
-
Структура
аппаратуры МСУД-001
Аппаратные средства
МСУД-001 построены по модульному принципу
с использованием программных принципов
обработки информации и имеют открытую
архитектуру, что позволяет подключать
дополнительные объекты контроля и
управления электровозом, а также
объединять системы управления нескольких
электровозов в общую систему. При этом
изменяется и дополняется только
программное обеспечение отдельных
модулей системы.
В таблице 1.1 приведен
состав МСУД-001 одной секции электровоза
2ЭС4К.
Отдельные блоки
МСУД-001 одной секции объединены в систему
дублированным последовательным
мультиплексным каналом связи CAN1/CAN2
(рисунок 1.1).
Таблица 1.1
|
Наименование |
Количество |
|
1 Блок индикации |
1(А78) |
|
2 Блок сигнализации |
1(А23) |
|
3 Блок управления |
1(А55) |
|
4 Блок управления |
1(А56) |
CAN
(Соntroller
Area
Network)
интерфейс (ISO
11898) обеспечивает высокую надежность,
компактность и хорошие динамические
характеристики, необходимые
распределительным системам управления.
Принципиальная
схема построения CAN-интерфейса
показана на рисунке 2 .
Физически шина
CAN-интерфейса
представляет собой витую пару проводов
и общий провод. Для работы в условиях
высокого уровня помех, как это имеет
место на электровозе, общий провод
выполнен в виде экрана витой пары. На
концах шины обязательно должны размещаться
согласующие резисторы R
номиналом 120 Ом.
С одной стороны
они расположены в БИ (Rсогл.),
с другой — в устройствах согласования
XS2,
подключаемых к внешним разъемам Х6
блоков А56 (БУО-002). Между собой блоки
БИ(А78) и БС-001(А23), БС-001(А55) и БУТП-001(А56),
попарно соединены при помощи кабелей
1…3, которые и образуют внутрисекционный
последовательный мультиплексный канал,
обеспечивающий обмен данными между
всеми подключенными к нему блоками.
При необходимости
подключить к системе дополнительные
блоки и устройства, вместо устройства
согласования XS2
подключается кабель, на другом конце
которого будет это дополнительное
устройство. При этом XS2
должно быть перенесено на дополнительное
устройство.
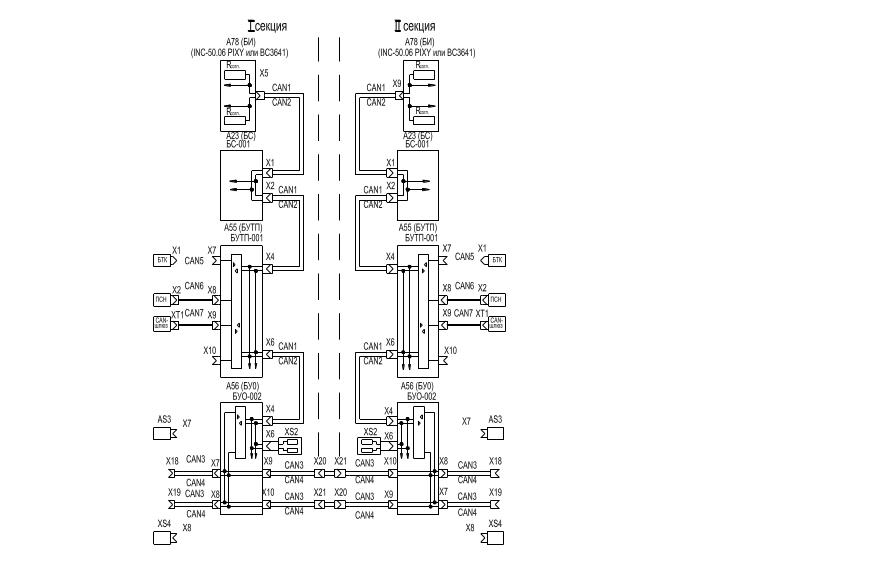
Рисунок 1 —
Структурная схема МСУД-001 электровоза
2ЭС4К

Рисунок 2 —
Построение CAN-сети
Для связи аппаратуры
МСУД-001 различных секций используется
дублированный последовательный
мультиплексный канал связи CAN3/CAN4,
который проходит транзитом через все
секции, в том числе подключенные по
системе многих единиц (СМЕ), для чего на
лобовых частях секций электровоза
установлены розетки Х18 и Х19. Связь между
каналами CAN1/CAN2
и CAN3/CAN4
осуществляется через микропроцессорный
модуль, обеспечивающий гальваническую
развязку и выполняющий программную
фильтрацию передаваемой информации. В
его функции также входит определение
по включению питания количества
включенных секций (от одной до четырех)
и их адресов и формирования на центральный
процессорный модуль информации о
готовности системы к работе.
Для согласования
каналов CAN3/CAN4
также применяются устройства согласования
XS3
и XS4,
подключаемые на концах линии к разъемным
соединителям Х7 и Х8 блоков БУО-002 (на
рисунке 1 они показаны в непосредственной
близости от соответствующих разъемов).
При необходимости подключения
дополнительной секции или электровоза
вместо устройств согласования XS3
и XS4
подключаются кабели 30 и 31 и осуществляется
соединение по СМЕ, при этом устройства
согласования XS3
и XS4
должны оставаться на разъемах Х7 и Х8
крайних секций состыкованного по СМЕ
электровоза.
Для связи системы
МСУД-001 с другими системами на блоке
БУТП-001 установлены разъемы Х7…Х10. К
каждому разъему подключен независимый
гальванически развязанный последовательный
интерфейс типа CAN
(CAN5…CAN8).
Связь между каналами CAN1/CAN2
и любым из CAN5…CAN8
осуществляется через микропроцессорные
модули, выполняющие программную
фильтрацию передаваемой информации,
обеспечивающие гальваническую развязку
и согласование скорости обмена информацией
между системами. В функции этих модулей
так же, как и в предыдущем случае, входит
определение по включению питания
количества подключенных к МСУД-001 систем.
На электровозе
2ЭС4К внешними системами по отношению
к МСУД-001 являются:
— система безопасности
КЛУБ-У, САУТ-ЦМ/485, подключаемые через
блок «ШЛЮЗ-САN»
к разъемному соединителюХ9 блока БУТП-001
(А17) – CAN7.
Система пневматического торможения
«УКТОЛ-Г» с краном машиниста 130 подключается
к МСУД через блоки «БС-КЛУБ» и «CAN-ШЛЮЗ»;
— блок управления
преобразователя собственных нужд (ПСН),
подключаемый к разъемному соединителю
Х8 блока БУТП-001 (А27) – CAN6;
— в перспективе к
разъемным соединителям Х7 (CAN5)
и Х10 (CAN8)
могут быть подключены другие системы,
например, теплового контроля оборудования
(БТК).
1.1.3 Основные
технические характеристики МСУД-001
1.1.3.1 Основные
технические характеристики МСУД-001
приведены в таблице 1.2.
Таблица 1.2
|
Наименование |
Значение |
|
1 Напряжение |
50±10 |
|
2 Потребляемая |
300 |
|
3 Напряжение |
110±44 |
|
4 Потребляемая |
460 |
|
5 Время готовности |
1 |
|
6 Время готовности |
30 |
|
7 Режим работы |
продолжительный |
|
8 Охлаждение |
воздушное, венная |
|
9 Количество |
2 (CAN1/CAN2 CAN3/CAN4) |
|
10 Количество |
4 (CAN5…CAN8) |
|
11 Скорость обмена |
512 |
|
12 Скорость обмена |
56 |
|
13 Скорость обмена |
* |
|
__________
* скорость обмена |
1.1.3.2 Аппаратные
средства МСУД-001 функционируют при
воздействии следующих внешних
климатических факторов:
-
температура
окружающей среды для аппаратуры,
расположенной в кузове электровоза от
минус 50ºС до плюс 60ºС, для блоков
расположенных в кабинах машиниста от
минус 40ºС до плюс 60ºС. При этом диапазон
температур хранения блоков, устанавливаемых
в кабинах машиниста от минус 50ºС до
плюс 60ºС; -
скорость возрастания
температуры окружающего воздуха при
запуске электровоза в работу до 1
град/мин; -
скорость спада
температуры окружающего воздуха после
окончания работы электровоза до 2
град/мин; -
относительная
влажность воздуха до 100% при температуре
20ºС; -
возможность
выпадения инея; -
тип атмосферы II
по ГОСТ15150-69; -
наличие пыли с
конденсацией до 20 кг/куб.м; -
максимальная
высота над уровнем моря до 1300 м.
1.1.3.3
В части воздействия внешних механических
факторов аппаратные средства МСУД-001
соответствуют группе М25 по ГОСТ
17516.1-90Е:
-
синусоидальная
вибрация в диапазоне частот от 0,5 до
100 Гц с максимальной амплитудой ускорения
1g
в любом из трех взаимно перпендикулярных
направлений; -
одиночные удары
в одном горизонтальном направлении с
пиковым ударным ускорением 3g
и длительностью ударного ускорения от
2 до 20 мс.
1.1.4 Функции,
реализуемые МСУД-001 на электровозе 2ЭС4К
1.1.4.1 Все функции
системы управления электровозом 2ЭС4К,
требующие логической последовательности,
такие как управление токоприемниками,
быстродействующим выключателем,
контакторами тягового и вспомогательного
привода и другими устройствами,
осуществляется МСУД-001 по командам,
получаемым от машиниста с учетом
сигналов датчиков, предусмотренных
схемой электровоза.
1.1.4.2 МСУД-001 в
режимах тяги и электрического торможения
выполняет следующие функции:
-
ручной и
автоматический (с регулированием
уставки пускового тока) набор и сброс
позиций;
-
управление
реостатными и линейными контакторами; -
управление
контакторами цепей ослабления возбуждения
тяговых двигателей; -
автоматическое
поддержание заданной скорости движения
поезда; -
контроль
последовательности включения реостатных
и линейных контакторов; -
защита от перегрузки
тяговых двигателей; -
защита от повышения,
понижения и исчезновения напряжения
в контактной сети; -
защита от боксования
и юза колесных пар; -
прием команд с
пульта машиниста на набор и сброс
позиций; -
управление ПСН и
ПВ:
а) формирование
сигналов подачи/снятия напряжения на
электродвигатели компрессора и
вентиляторов;
б) формирование
сигналов задания величины и частоты
напряжения питания вентиляторов в
зависимости от нагрузки тяговых
двигателей;
в) формирование
сигналов подачи/снятия напряжения на
преобразователи питания обмоток
возбуждения тяговых двигателей в
режимах тяги и
торможения;
г) формирование
сигналов задания величины напряжения
питания преобразователей питания
обмоток возбуждения тяговых двигателей
в режимах тяги и торможения;
д) формирование
сигналов задания работы вспомогательных
цепей в штатном/аварийных режимах (выбор
режима резервирования);
е) формирование
сигналов подачи/снятия напряжения
питания цепей санитарно-гигиенического
оборудования и кондиционера.
-
учет и хранение
в памяти расхода электроэнергии на
тягу и рекуперацию (без проведения
метрологической экспертизы и без
сертифицирования методов и средств
измерения); -
автоматическое
управление режимами рекуперативного
и реостатного торможения; -
плавный вход в
режим рекуперации; -
режим предварительного
подтормаживания с усилием не более 98
кН (10 тс) (независимо от числа секций); -
регулирование
заданного значения тока якоря; -
ограничение
значений тока якоря Iя
и тока возбуждения Iв
по максимальным величинам. Максимально
реализуемая тормозная сила по условиям
выдавливания вагонов должна быть
ограничена величиной 500 кН (50 тс)
независимо от числа секций; -
ограничение
величины напряжения на тяговых двигателях
на уровне не более 4,1 кВ (в рекуперации); -
ограничение тока
якоря по условиям коммутации тяговых
двигателей заданным соотношением тока
якоря и возбуждения (уточняется при
испытаниях); -
индикация
соответствующей позиции; -
индикация позиции
ослабления возбуждения; -
индикация боксования
или юза; -
индикация превышения
напряжения контактной сети; -
индикация
пониженного напряжения контактной
сети; -
индикация перегрузки
тяговых двигателей; -
индикация состояния
ПСН, вентиляторов и компрессоров; -
вывод аудиоинформации
машинисту.
1.1.5 Алгоритм
управления МСУД-001
Алгоритм управления
МСУД-001 подразделяется на алгоритм
функционирования БУТП-001 и БУО-002.
1.1.5.1 Обобщенный
алгоритм функционирования БУТП-001
Алгоритм
функционирования БУТП-001 приведен в
соответствии с рисунком 3 . После
включения питания производится
самодиагностика аппаратной части блока
БУТП-001 (блок 2). Далее осуществляется
ввод данных по системному интерфейсу
(CAN1
или CAN2)
от блока БУО-002 и дискретной информации
по SPI-каналу
от БВ-005 (блоки 3-4). В блоке 5 вводятся
данные с датчиков системы. В случае
ведущей секции осуществляется проверка
включения выключателей ТОКОПРИЕМНИК
1, ТОКОПРИЕМНИК 2 на блоке выключателей
S20,
выключателя БВ, установки реверсивного
переключателя в положение ВПЕРЕД/НАЗАД,
рукоятки главного вала контроллера
машиниста в зону ТЯГА или ТОРМОЖЕНИЕ и
на основании проведенного анализа
формируются команды на включение
соответствующих вентилей на ведущей и
ведомых секциях (блоки 6-7). Если контроллер
машиниста находится в нулевом положении,
то производится начальная установка
для ведущей и ведомых секций и передача
по межсекционному каналу CAN3/CAN4
команд для ведомых секций и по
внутрисекционному каналу CAN1/CAN2
сообщений для БУО-002 (блоки 8-11, 48). На
ведущей секции в блоках 13-15 в зависимости
от режима работы определяются задания
тока и скорости для режима АВТОРЕГУЛИРОВАНИЯ
или АВТОВЕДЕНИЯ. Далее в блоке 16
проверяется необходимость отключения
БВ для защиты тяговых
двигателей от перегрузок и токов
короткого замыкания в режимах тяги,
рекуперативного и реостатного торможения,
пускотормозных резисторов от перегрузки
в режиме тяги и реостатного торможения,
от исчезновения напряжения в контактной
сети, от недопустимого напряжения в
контактной сети, от неправильного
включения коммутационной аппаратуры
силовой схемы электровоза. В блоке 17 на
основании данных от датчиков температуры
и тока определяется частота вращения
вентиляторов тяговых двигателей для
передачи МПСУ ПСН. При возникновении
боксования в режиме тяги или юза в режиме
электрического торможения в блоке 19
осуществляется защита регулированием
тока возбуждения и подсыпкой песка.
При отключении
пары двигателей, БПТР, БВ или секции
фиксируется аварийный режим работы и
в случае электрического торможения
разбирается схема с дальнейшим переходом
в тяговый режим (блоки 21, 22, 26). При
возникновении нештатной ситуации работа
в режиме тяги осуществляется в соответствии
с диаграммами включения контакторов
для аварийных режимов (блок 45, 46). В
штатном режиме при нахождении главной
рукоятки контроллера машиниста в
положении “ПТ” БУТП-001 собирает схему
торможения. При дальнейшем передвижении
рукоятки в зоне ТОРМОЖЕНИЕ в зависимости
от положения тумблера S37
реализуется либо режим реостатного
торможения, либо режим рекуперации
(блоки 37-44).
В режиме тяги при
собранной схеме (блоки 27-30) анализируется
способ возбуждения тяговых двигателей
(блок 31). Как при последовательном, так
и при независимом возбуждении в режиме
ручного управления набор и сброс позиций
производится машинистом. В режиме
автоматики при обоих способах возбуждения
управление силовой схемой электровоза
возлагается на БУТП-001. Все ветви алгоритма
заканчиваются выдачей сообщений по
внутрисекционному каналу CAN1
или CAN2
для БУО-002 и БИ и межсекционному для
других секций, а также по SPI-каналу
для БВВ-006 (блок 48).
Рисунок 3 —
Обобщенный алгоритм функционирования
БУТП-001.
1.1.2.2 Обобщенный
алгоритм функционирования блока
управления
оборудованием
БУО-002
Обобщенный алгоритм
функционирования блока управления
оборудованием БУО-002 приведен в
соответствии с рисунком 4.
Рабочая программа,
реализующая данный алгоритм, является
циклической с фиксированным временем
выполнения одного прохода. Исходя из
технических решений, заложенных в
БУО-002 и возложенными на него функциями
управления, интервал повторения одного
прохода принят равным 10 мс. Источником
тактовых сигналов требуемой частоты
является внутренний таймер контроллера,
настроенный на требуемый интервал
времени.
Запуск рабочей
программы осуществляется по прерыванию
от внутреннего таймера, настроенного
на период 10 мс (блок 1). После пуска
программы выполняется ввод/вывод данных
сформированных в предыдущем проходе.
Осуществляется ввод сигналов с АЦП,
ввод импульсных сигналов, ввод дискретных
сигналов с блока входных сигналов
(БВ-005) и данных из последовательных
каналов связи CAN
и RS-485,
вывод управляющих воздействий на блок
дискретных выходных сигналов (БДВ-006),
формирование массивов рабочей информации
и передача их по последовательным
каналам связи CAN
и RS-485
(блок 2).
После получения
необходимой информации определяется
режим работы секции электровоза (блок
3): если работает от сети депо, то
выполняется подключение вспомогательных
машин и устройств к сети питания депо
(блок 4). Иначе, если электровоз работает
в автономном режиме, определяется
составность электровоза и является
секция ведущей или ведомой (блок 5). При
получении информации от БУТП-001 о поднятии
токоприёмников производится управление
вентилями защита. Затем, если токоприёмники
не подняты (блок 7), то программа переходит
в режим ожидания следующего прерывания
от внутреннего таймера (блок 21).
После поднятия
токоприёмников (блок 7) происходит
последовательно управление главным
компрессором (блок 8), клапанами продувки
и маслоотделителем (блок 13), реле для
системы САУТ (блок 14), клапанами песочниц
(блок 15), тифоном (блок 16), клапаном
замещения и свистком срыва электрического
торможения (блок 17), сигналом запрета
гребнесмазывания (блок 18) и
электроблокировочным клапаном (блок
19).
Также происходит
последовательно управление устройствами
подключёнными к ПСН: выдача сигналов
управления на вентиляторы (блок 9),
управление каналом питания устройств
микроклимата (блок 10), подключение
преобразователей возбуждения (блок
11).
Осуществляется
алгоритм резервирования ПСН в аварийных
режимах, при выходе из строя оборудования,
подключённого к ПСН (блок 20).
После ввода/вывода
данных и формирования управляющих
сигналов программа переходит в режим
ожидания прерывания от внутреннего
таймера, настроенного на период 10 мс
(блок 21).
Рисунок 4 —
Обобщенный алгоритм функционирования
блока управления
оборудованием
БУО-002.
Соседние файлы в папке Книга 5
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #