
-
Contents
-
Table of Contents
-
Bookmarks
Quick Links
*28503473_0420*
Drive Technology \ Drive Automation \ System Integration \ Services
Operating Instructions
Decentralized Drive Systems
®
Explosion-Protected MOVIMOT
MM..D Drives
with 3D Category EDRN.. AC Motors
Edition 04/2020
28503473/EN
Related Manuals for SEW-Eurodrive MOVIMOT MM D Series
Summary of Contents for SEW-Eurodrive MOVIMOT MM D Series
-
Page 1
*28503473_0420* Drive Technology \ Drive Automation \ System Integration \ Services Operating Instructions Decentralized Drive Systems ® Explosion-Protected MOVIMOT MM..D Drives with 3D Category EDRN.. AC Motors Edition 04/2020 28503473/EN… -
Page 2
SEW-EURODRIVE—Driving the world… -
Page 3: Table Of Contents
Contents Contents Valid components…………………… 6 W 3 × 400 – 500 V (400 V) ……………. 6 1400 min 2900 min m 3 × 400 – 500 V (400 V) ……………. 6 Fieldbus interfaces in category 3D (zone 22) ………….. 7 Setpoint converter MLA12A in category 3D………….. 7 General information…………………… 8 About this documentation ……………….. 8 Structure of the safety notes ………………. 8 Decimal separator in numerical values …………….. 10…
-
Page 4
Contents Protection concept …………………. 44 ® Connecting MOVIMOT in conjunction with a fieldbus interface ……… 44 ® Connection of MOVIMOT options ……………. 52 Connection of the RS485 bus master ……………. 55 Startup ……………………….. 56 General information concerning startup……………. 56 Requirements…………………… 57 Description of the controls ……………….. 57 Description of the DIP switches S1……………. 59 Description of DIP switches S2……………… 60 Selectable additional functions MM..D-503-14 … -
Page 5
Contents 12.9 Lubricant tables…………………. 119 12.10 Order information for lubricants, anti-corrosion agents and sealants …… 119 12.11 Operating characteristics ……………….. 120 12.12 Braking torque assignment ……………… 121 12.13 Braking work, working air gap, and brake lining carrier thickness …… 121 12.14 Resistance and assignment of the brake coil …………. 121 12.15 Assignment of internal braking resistors ………….. 122 12.16… -
Page 6: Valid Components
Valid components 1400 min-1 3 × 400 – 500 V (400 V) Valid components INFORMATION ® These operating instructions apply to the following MOVIMOT drives: 1400 min-1 3 × 400 – 500 V (400 V) W 3 × 400 – 500 V (400 V) 1400 min Type cos φ…
-
Page 7: Setpoint Converter Mla12A In Category 3D
Valid components Fieldbus interfaces in category 3D (zone 22) in conjunction with MOVIMOT in category 3D (zone 22) Fieldbus interfaces in category 3D (zone 22) in conjunction with MOVIMOT in category 3D (zone Fieldbus interfaces in category 3D (zone 22) The following figure shows the fieldbus interfaces available in category 3D: ®…
-
Page 8: General Information
General information About this documentation General information About this documentation The documentation at hand is the original. This documentation is an integral part of the product. The documentation is intended for all employees who perform work on the product. Make sure this documentation is accessible and legible. Ensure that persons respon- sible for the systems and their operation as well as persons who work on the product independently have read through the documentation carefully and understood it.
-
Page 9
General information Structure of the safety notes Meaning of the hazard symbols The hazard symbols in the safety notes have the following meaning: Hazard symbol Meaning General hazard Warning of dangerous electrical voltage Warning of hot surfaces Warning of automatic restart Note on explosion protection 2.2.3 Structure of embedded safety notes… -
Page 10: Decimal Separator In Numerical Values
General information Decimal separator in numerical values Decimal separator in numerical values In this document, a period is used to indicate the decimal separator. Example: 30.5 kg Rights to claim under limited warranty Read the information in this documentation. This is essential for fault-free operation and fulfillment of any rights to claim under limited warranty.
-
Page 11: Safety Notes
Safety notes Preliminary information Safety notes Preliminary information The following general safety notes serve the purpose of preventing injury to persons and damage to property. They primarily apply to the use of products described in this documentation. If you use additional components, also observe the relevant warning and safety notes.
-
Page 12: Target Group
Safety notes Target group Target group Specialist for me- Any mechanical work may be performed only by adequately qualified specialists. Spe- chanical work cialists in the context of this documentation are persons who are familiar with the design, mechanical installation, troubleshooting, and maintenance of the product who possess the following qualifications: •…
-
Page 13: Functional Safety Technology
Functional safety technology 3.4.2 Restrictions under the European WEEE Directive 2012/19/EU You may use options and accessories from SEW-EURODRIVE exclusively in connec- tion with products from SEW-EURODRIVE. Functional safety technology The product must not perform any safety functions without a higher-level safety sys- tem unless explicitly allowed by the documentation.
-
Page 14: Installation/Assembly
Safety notes Installation/assembly Installation/assembly Note the following points during installation: • Make sure that the supports are even, the foot and flange mounting is correct and if there is direct coupling, align with precision. • Avoid resonance between the rotational frequency and the double supply system frequency.
-
Page 15: Startup/Operation
Safety notes Startup/operation 3.10 Startup/operation Observe the safety notes in chapters Startup and «Operation» (→ 2 93) in this docu- mentation. Make sure the connection boxes are closed and screwed before connecting the sup- ply voltage. Depending on the degree of protection, products may have live, uninsulated, and sometimes moving or rotating parts as well as hot surfaces during operation.
-
Page 16: Unit Design
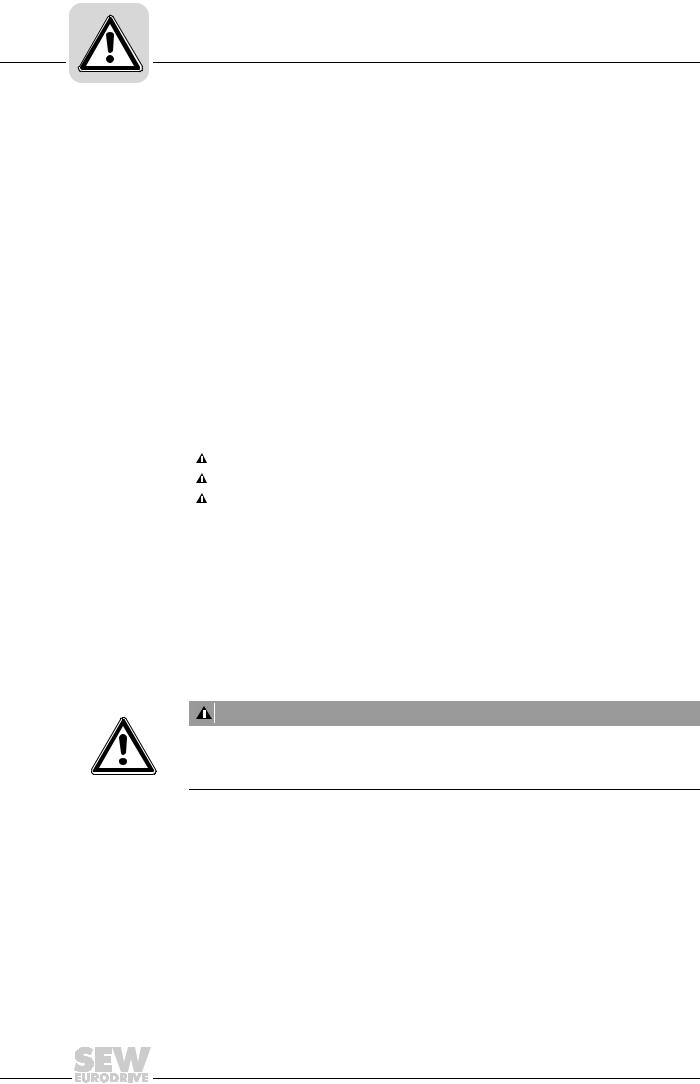
Unit design MOVIMOT drive Unit design MOVIMOT drive ® MOVIMOT drive ® The following figure shows an example of a MOVIMOT drive with helical gear unit: 3992077451 ® [1] MOVIMOT inverter [2] Connection box [3] Motor [4] Helical gear unit ®…
-
Page 17: Movimot ® Inverter
Unit design MOVIMOT inverter MOVIMOT inverter ® MOVIMOT inverter ® The following figure shows the connection box and the MOVIMOT inverter: 0 1 2 0 1 2 [10] [11] [5] [12] [13] [14] [15] [16] [17] [18] 9007199880561035 Connection box X10: Plug connector for BEM option ®…
-
Page 18
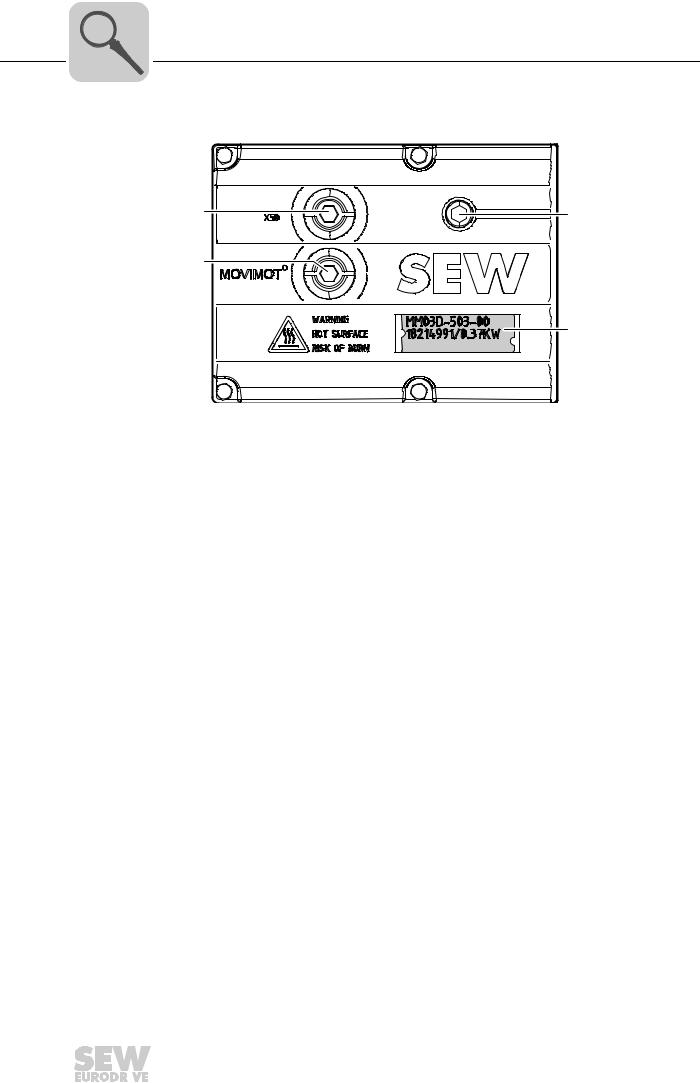
Unit design MOVIMOT inverter ® The following figure shows the top side of the MOVIMOT inverter: 1 min 28722977291 [1] X50: Diagnostic interface with screw plug [2] Setpoint potentiometer f1 with screw plug [3] Status LED [4] Identification tag ® 4.2.1 MOVIMOT device properties… -
Page 19: Fieldbus Interfaces
Unit design Fieldbus interfaces Fieldbus interfaces 4.3.1 MF.21 fieldbus interface 1132777611 [1] Status LEDs [2] Diagnostic interface (underneath the screw fitting) INFORMATION Do not loosen the screw fitting of the diagnostic interface [2] in potentially explosive atmospheres. 4.3.2 Interface bottom side 1132786955 [1] Connection to connection module [2] DIP switches (dependent on variant)
-
Page 20
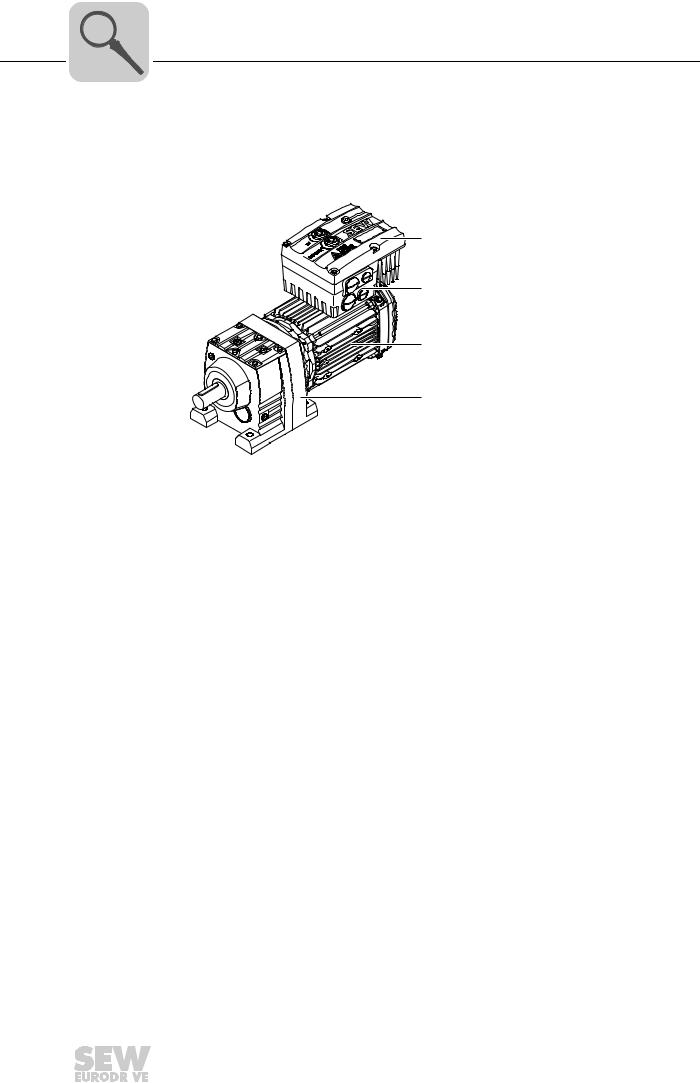
Unit design Fieldbus interfaces 4.3.3 Device structure of MFZ connection module The following figure shows the MFZ connection module. 9007200390917003 [1] Terminal strip X20 [2] Isolated terminal block for 24 V through-wiring (NOTICE: Do not use for shielding.) [3] M20 cable gland [4] M12 cable gland [5] Grounding terminal The scope of delivery includes 2 EMC cable glands. -
Page 21: Movimot Drive Type Designation
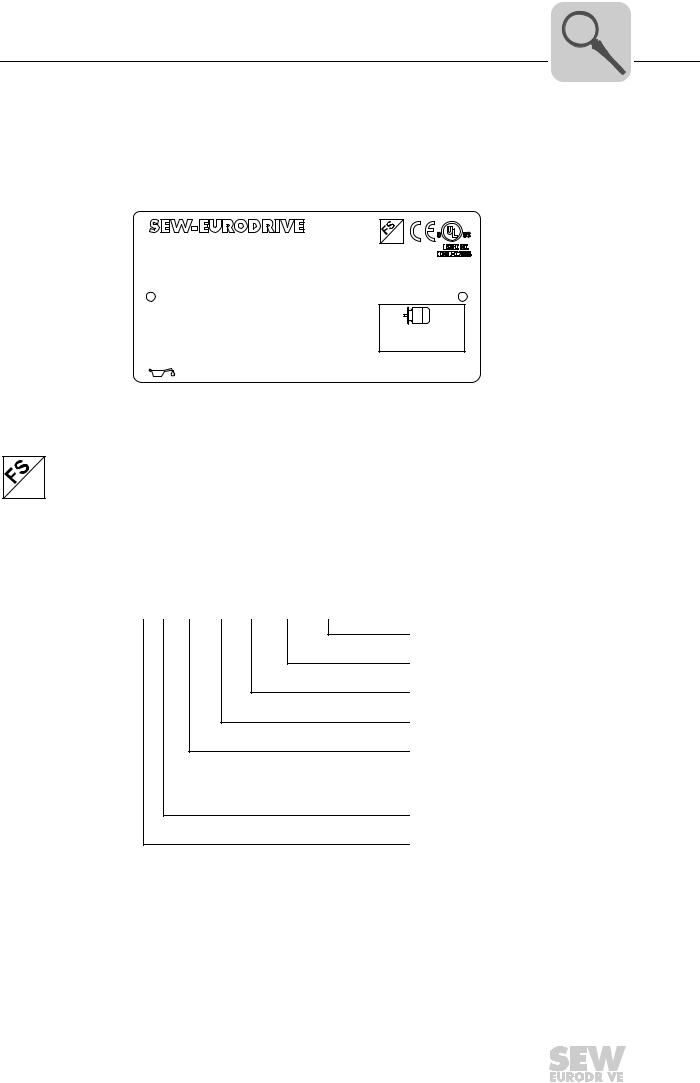
Unit design MOVIMOT® drive type designation MOVIMOT® drive type designation ® MOVIMOT drive type designation 4.4.1 Nameplate ® The following figure shows an example of a MOVIMOT drive nameplate. The name- plate is located on the motor. 6205-2Z-J-C3 6205-2Z-J-C3 RF47/II2GD EDRN90L4 BE2/MM15/3D/MO 01.1207730201.0001.11 2020 Jahr…
-
Page 22: Movimot® Inverter Type Designation
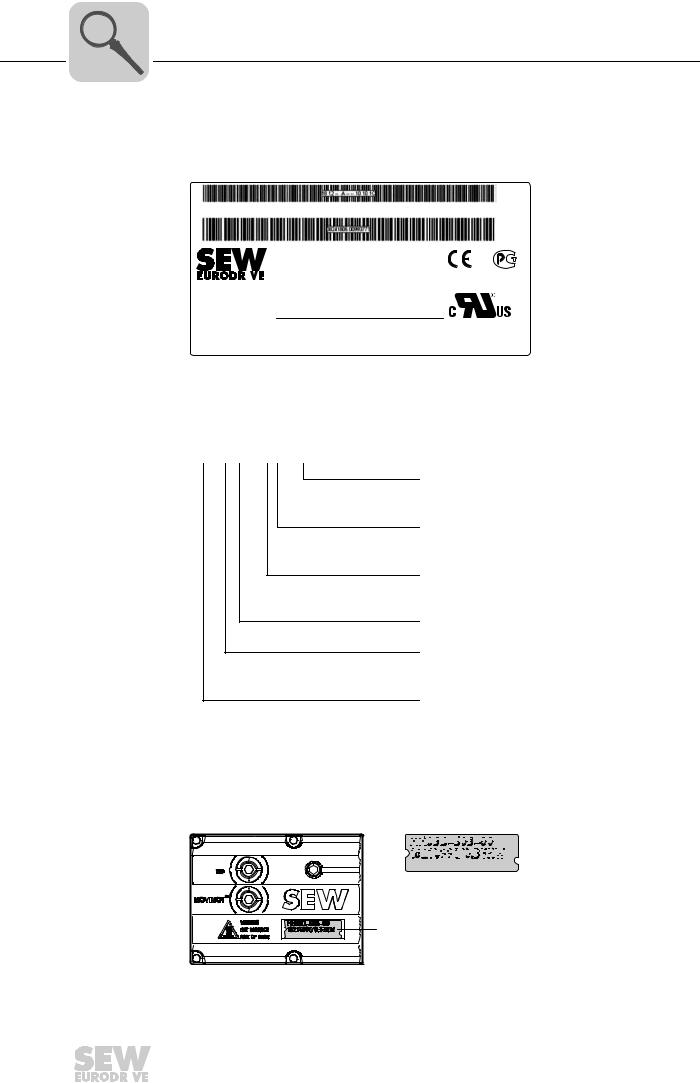
Unit design MOVIMOT® inverter type designation MOVIMOT® inverter type designation ® MOVIMOT inverter type designation 4.5.1 Nameplate ® The following figure shows an example of a MOVIMOT inverter nameplate: Status: 15 10 10 49/17 836 MM05D-503-14/3D Type: 28262719 1366928 Eingang / Input Ausgang / Output 3×400…500V AC 3x0V…Uin…
-
Page 23
Unit design MOVIMOT® inverter type designation 4.5.3 Identification tag ® The identification tag [1] on the top of the MOVIMOT inverter provides information about the inverter type [2], inverter part number [3], device power [4]. 1 min 9007203056379787 ® Operating Instructions – Explosion-Protected MOVIMOT MM..D Drives… -
Page 24: Type Designation Of Fieldbus Interfaces
Unit design Type designation of fieldbus interfaces Type designation of fieldbus interfaces 4.6.1 Nameplate The following figure shows an example of the nameplate of a fieldbus interface: II3D Ex tc IIIC T120°C Dc Feldbus-Schnittstelle / Fieldbus interface Made in Germany TYP: MFP21D/Z21D/3D Sach-NR.:…
-
Page 25: Type Designation Of Module Terminal Box
Unit design Type designation of module terminal box Type designation of module terminal box 4.7.1 Nameplate The following figure shows an example of the nameplate of the module terminal box: p# : 08236739 s# : 0921893 .70 — 14/14 MFZ21D/II3D 28814284043 4.7.2 Type designation…
-
Page 26
Unit design Identification of explosion-protected drives 4.8.2 Marking in accordance with directives and standards The protection types are linked to equipment groups, categories, potentially explosive atmospheres, minimum degrees of protection and temperature classes, and are indic- ated on the nameplate according to EU Directive 2014/34/EU. The identification according to the standard includes the following symbols: •… -
Page 27
Unit design Identification of explosion-protected drives 4.8.3 Identification for potentially explosive dust atmospheres Example Ex tc Symbol for explosion protection with protection type/protection level IIIC Classification of the dust group T120°C Maximum surface temperature in °C Equipment protection level Classification of the dust group In addition, equipment group III has been split up into three subgroups A, B and C de- pending on the type of dust. -
Page 28: Mechanical Installation
Mechanical installation Installation notes Mechanical installation Installation notes INFORMATION Observe the general safety notes. WARNING ® Improper installation/disassembly of MOVIMOT drives and mount-on components. Risk of injury. • Adhere to the notes about installation and disassembly. • Before releasing shaft connections, make sure that there are no active torsional moments present (tensions within the system).
-
Page 29: Installation Of Movimot Gearmotor
Mechanical installation Installation of MOVIMOT® gearmotor • The ambient temperature corresponds to the specifications in chapter «Technical data» of the operating instructions. Note that the temperature range of the gear unit may also be restricted (see gear unit operating instructions). ®…
-
Page 30
Mechanical installation Installation of MOVIMOT® gearmotor ® 5.4.2 Installing MOVIMOT NOTICE ® Loss of guaranteed degree of protection if the MOVIMOT inverter is installed incor- rectly or not at all. ® Damage to the MOVIMOT inverter. ® • When removing the MOVIMOT inverter from the connection box, it must be pro- tected from dust and moisture. -
Page 31: Setpoint Converter Mla12A Installation
• The MLA12A setpoint converter in category 3D is only available in combination ® with a MOVIMOT drive. • Only trained personnel from SEW-EURODRIVE may perform installation and as- ® sembly work on the MOVIMOT connection box. Tightening torques ®…
-
Page 32
Mechanical installation Tightening torques 5.6.3 Cable glands Observe the manufacturer’s specifications and the follow- ing information for cable glands. • Pay attention to the O-ring on the thread [1]. • The thread must be 5 – 8 mm long [2]. 5 – 8 mm [2] 5.6.4 Screw plugs for cable entries Tighten screw plugs with 2.5 Nm. -
Page 33
Mechanical installation Tightening torques 5.6.6 Tightening torques for terminals Use the following tightening torques for terminals during installation: 9007199713346059 0.8 – 1.5 Nm 1.2 – 1.6 Nm 2.0 – 2.4 Nm ® Operating Instructions – Explosion-Protected MOVIMOT MM..D Drives… -
Page 34: Electrical Installation
Electrical installation Installation notes Electrical installation Installation notes Observe the following information on electrical installation: • Observe the general safety notes. • Comply with all instructions referring to the technical data and the permissible con- ditions where the unit is operated. •…
-
Page 35
Electrical installation Installation instructions 6.2.2 Connecting power supply cables ® • Nominal voltage and frequency of the MOVIMOT inverter must match the data of the supply system. • Install safety features F11/F12/F13 for line fuses at the beginning of the power ®… -
Page 36
Electrical installation Installation instructions ® 6.2.3 Permitted cable cross section of the MOVIMOT terminals Power terminals Observe the permitted cable cross sections for installation: Power terminals Cable cross section 1.0 mm – 4.0 mm (2 x 4.0 mm Conductor end sleeves • For single assignment: Connect only single-wire conductors or flexible conductors with conductor end sleeves (DIN 46228, material E‑CU) with or without… -
Page 37
Electrical installation Installation instructions 6.2.4 Using the control terminals X5 – X6 Note the following information for actuating the control terminal clamps: Connect conductor Connect conductor without pressing the activation after pressing the activation button. button. 9007199919965835 9007200623153931 The following conductors can be installed When connecting the following conduct- directly (without tools) up to two cross ors, you must press the actuation button… -
Page 38
Electrical installation Installation instructions 6.2.5 Residual current device WARNING No protection against electric shock if an incorrect type of residual current device is used. Severe or fatal injuries. • The product can cause direct current in the PE conductor. If a residual current device (RCD) or a residual current monitoring device (RCM) is used for protec- tion in the event of a direct or indirect contact, only a type B RCD or RCM is per- mitted on the supply end of the product. -
Page 39
Electrical installation Installation instructions 6.2.7 Equipotential bonding According to EN 60079‑14, connection to an equipotential bonding system is required. A second connection option is available on the status housing for this purpose. Ob- serve chapter «Improving the grounding (EMC), HF grounding» (→ 2 40). 6.2.8 Notes on PE connection WARNING… -
Page 40
Electrical installation Installation instructions 6.2.9 EMC-compliant installation INFORMATION This drive system is not designed for operation on a public low voltage grid that sup- plies residential areas. This is a product with restricted availability (categories C1 to C4 according to EN … -
Page 41
Electrical installation Installation instructions EDRS71, EDRE80, EDRN71 – 80 motors with HF (+NF) grounding 8026768011 Use of the pre-cast bore at the Ground strap (not included in the deliv- stator housing ery) Serrated lock washer Self-tapping screw DIN 7500 M6 × 16, tightening torque 10 Nm Disk ISO 7093 EDRE90, EDRN90 motors with HF (+LF) grounding 8026773131… -
Page 42
Electrical installation Installation instructions EDRE100M, EDRN100LS motors with HF (+LF) grounding 18014402064551947 Use of the pre-cast bore at the Ground strap (not included in the deliv- stator housing ery) Serrated lock washer Self-tapping screw DIN 7500 M6 × 16, tightening torque 10 Nm Disk ISO 7093 EDRE100L –… -
Page 43
® MOVIMOT drives must not be exposed to harmful radiation (e.g. ionizing radiation). Consult SEW-EURODRIVE, if required. Hazardous gases, vapors and dusts If used according to their designated use, explosion-protected motors are incapable of igniting explosive gases, vapors or dusts. However, explosion-protected motors may… -
Page 44: Protection Concept
If the motor is operated in environments with high environmental impact, such as in- creased ozone levels, EDR. motors can optionally be equipped with higher-quality gaskets. If you have doubts regarding the stability of the gaskets in connection with the respective environmental impacts, consult SEW-EURODRIVE. Protection concept INFORMATION To avoid exceeding the permissible temperature, you may only operate the ®…
-
Page 45
Electrical installation Connection – MOVIMOT in conjunction with fieldbus interface • Data lines and 24 V supply Route data lines and 24 V supply separately from cables that emit interference (such as control cables of solenoid valves, motor cables). • Cable glands Select a cable gland with a shield connected over a large area. -
Page 46
Electrical installation Connection – MOVIMOT in conjunction with fieldbus interface • Make sure that any cable entries you are not using are sealed with screw plugs for potentially explosive areas in accordance with EN 60079-0. • The enclosure must be ensured in accordance with the data on nameplate (at least IP54). -
Page 47
Electrical installation Connection – MOVIMOT in conjunction with fieldbus interface Impermissible assembly Recommendation: Assembly with solid connecting wire Assembly with forked cable lug Permitted for cross section Permitted for all cross sections up to max. 2.5 mm 2.5 mm² [1] Forked cable lug suitable for M5 PE screws. Earth-leakage currents ≥ 3.5 mA can occur during normal operation. -
Page 48
Electrical installation Connection – MOVIMOT in conjunction with fieldbus interface [1] Assignment of terminals 19-36 see chapter «Connection of fieldbus interface inputs/outputs (I/O)» (→ 2 51) [2] Ensure equipotential bonding between all bus stations Terminal assignment Name Direction Function X20 1 Input PROFIBUS-DP data line A (incoming) Input PROFIBUS-DP data line B (incoming) DGND… -
Page 49
Electrical installation Connection – MOVIMOT in conjunction with fieldbus interface ® 6.4.4 Connection of MOVIMOT , fieldbus interface close to the motor ® The following wiring diagram shows the connection of MOVIMOT with fieldbus inter- face close to the motor: F11/F12/F13 ®… -
Page 50
Electrical installation Connection – MOVIMOT in conjunction with fieldbus interface ® 6.4.5 Connection of MOVIMOT , fieldbus interface on the drive ® The following wiring diagram shows the connection of MOVIMOT with integrated fieldbus interface: F11/F12/F13 ® MOVIMOT MFZ.. / 3D [2] [3] [4] DC 24 V 3815393419… -
Page 51
Electrical installation Connection – MOVIMOT in conjunction with fieldbus interface 6.4.6 Connection – inputs/outputs (I/O) of fieldbus interfaces The following wiring diagram shows the connection of the digital inputs/outputs of the fieldbus interface: 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 3815762699 = Potential level 1 = Potential level 2… -
Page 52: Connection Of Movimot Options
Electrical installation Connection of MOVIMOT® options • Check the polarity of the DC 24 V cable. • Check the polarity of the communication cable. • Provide for the equipotential bonding between the fieldbus interfaces. After the wiring check • Install all the fieldbus interfaces. Connection of MOVIMOT®…
-
Page 53
Electrical installation Connection of MOVIMOT® options [5] HT1/HT2: Intermediate terminals for temperature switch TH (max. 24 V + 10% to ground) [6] Ready signal (contact closed = ready for operation) [7] Higher-level controller (PLC) [8] Independent evaluation unit with restart lock The independent evaluation unit must contain basic insulation from safe electrically isolated circuits. -
Page 54
Electrical installation Connection of MOVIMOT® options RS485 bus master Independent evaluation unit with restart lock The independent evaluation unit must contain basic insulation from safe electrically isolated circuits. Both directions of rotation are enabled [10] Metal cable gland [11] Equipotential bonding with RS485 bus master ®… -
Page 55: Connection Of The Rs485 Bus Master
Electrical installation Connection of the RS485 bus master Setpoint changeover f1/f2 HT1/HT2: Intermediate terminals for temperature switch TH (max. 24 V + 10% to ground) Ready signal (contact closed = ready for operation) Setpoint converter MLA12A Connection example with several MLA12A setpoint converters Higher-level controller (PLC) [10] Relay monitoring with restart lock Connection of the RS485 bus master…
-
Page 56: Startup
Startup General information concerning startup Startup General information concerning startup INFORMATION You must comply with the general safety notes in chapter «Safety notes» during start- WARNING Risk of crushing due to missing or defective protective covers. Severe or fatal injuries. •…
-
Page 57: Requirements
Startup Requirements Requirements The following conditions apply to the startup: ® • The MOVIMOT drive must be installed correctly both mechanically and electrical- • Appropriate safety measures prevent the drives from starting up unintentionally. • Appropriate safety measures must be taken to prevent risk of injury or damage to the machine.
-
Page 58
Startup Description of the controls 7.3.2 Switch f2 The switch f2 has different functions depending on the operating mode: • Binary control: Setting setpoint f2 (f2 is selected via terminal f1/f2 X6:7,8 = «1») • Control via RS485: Minimum frequency setting f Switch f2 Detent setting Setpoint f2 Hz… -
Page 59: Description Of The Dip Switches S1
Startup Description of the DIP switches S1 DIP switch S1: Meaning Binary coding Motor pro- Motor PWM fre- No-load RS485 device tection power sec- quency damping address tion No function Variable No function (16, 8, 4 kHz) 4 kHz 1) The motor power stage is always adapted. 2) No-load damping is always disabled.
-
Page 60: Description Of Dip Switches S2
Startup Description of DIP switches S2 7.4.2 DIP switch S1/5 Motor protection switched on or switched off SEW-EURODRIVE recommends to always keep the motor protection enabled, i.e. S1/5 = «OFF». Description of DIP switches S2 7.5.1 DIP switches S2/5 – S2/8 Additional functions •…
-
Page 61
Startup Selectable additional functions MM..D-503-14 7.6.2 Additional function 1 ® MOVIMOT with increased ramp times 329690891 Functional description • It is possible to set ramp times of up to 40 s. • In RS485 control mode, a ramp time of max. 40 s can be transmitted when using 3 process data units. -
Page 62: Selectable Additional Functions Mm
Startup Selectable additional functions MM..D-503-14 7.6.4 Additional function 10 ® MOVIMOT with reduced torque at low frequencies 330179211 Functional description • When activated, drive monitoring is deactivated by the current limit characteristic. Operating characteristic curves can be permanently exceeded. The TH tempera- ture switch protects against impermissible heating.
-
Page 63
Startup Selectable additional functions MM..D-503-14 Minimum frequency = 0 Hz Control via RS485: In detent position 0 of switch f2, the minimum frequency with the activated additional function is 0 Hz. All other values that can be set remain unchanged. Switch f2 Detent setting Minimum frequency [Hz] with active additional… -
Page 64: Startup With Binary Control
Startup Startup with binary control Startup with binary control ® 1. Remove the MOVIMOT inverter from the connection box. ® 2. Check whether the MOVIMOT drive is installed correctly both mechanically and electrically. See chapters «Mechanical installation» and «Electrical installation». 3.
-
Page 65
Startup Startup with binary control INFORMATION During operation, the first speed is infinitely variable using the setpoint potentiometer f1 which is accessible from outside. Speeds f1 and f2 can be set independently of each other. 7. Set the ramp time at the switch t1. The ramp time is based on a setpoint step change of 1500 min (50 Hz). -
Page 66
Startup Startup with binary control Inverter Terminal signal level Status behavior Supply f1/f2 CW/stop CCW/ system stop X1:L1 – X6:1,2,3 X6:7,8 X6:11,12 X6:9,10 L3 CW rotation Green with f2 CCW rotation Green with f2 Stop Yellow Key: 0 = No voltage 1 = Voltage X = Any 7.7.2… -
Page 67: Startup With Mla12A Setpoint Converter
Startup Startup with MLA12A setpoint converter Startup with MLA12A setpoint converter WARNING Electric shock from capacitors that have not been fully discharged. Severe or fatal injuries. • Disconnect the inverter from the power. Observe the minimum switch-off time after disconnection from the supply system: –…
-
Page 68
Startup Startup with MLA12A setpoint converter 7. Make sure the screw plug of the setpoint potentiometer f1 has a seal and screw it NOTICE! Loss of warranted degree of protection if the screw plugs of the f1 set- point potentiometer or the X50 diagnostic interface are installed incorrectly or not at all. -
Page 69
Startup Startup with MLA12A setpoint converter INFORMATION • The TH automatically switches itself back on when the temperature drops below the maximum value. The evaluation unit must prevent the drive from restarting au- tomatically (restart lock). • Do not switch the drive back on until the cause of the problem has been checked. This check must be performed by a trained specialist. -
Page 70: Easy» Startup With Rs485 Interface/Fieldbus
«Easy» startup with RS485 interface/fieldbus General information concerning startup «Easy» startup with RS485 interface/fieldbus General information concerning startup INFORMATION You must comply with the general safety notes in chapter «Safety notes» during start- WARNING Risk of crushing due to missing or defective protective covers. Severe or fatal injuries.
-
Page 71: Requirements
«Easy» startup with RS485 interface/fieldbus Requirements Requirements The following conditions apply to the startup: ® • The MOVIMOT drive must be installed correctly both mechanically and electrical- • Appropriate safety measures prevent the drives from starting up unintentionally. • Appropriate safety measures must be taken to prevent risk of injury or damage to the machine.
-
Page 72
«Easy» startup with RS485 interface/fieldbus Startup procedure 5. If the ramp time is not specified via the fieldbus, set the ramp time at switch t1. The ramp time is based on a setpoint step change of 1500 min (50 Hz). Switch t1 Detent setting Ramp time t1 s 0.1 0.2 0.3 0.5 0.7… -
Page 73: Coding Of Process Data
«Easy» startup with RS485 interface/fieldbus Coding of process data [1] Potentiometer setting 9. NOTICE! Loss of warranted degree of protection if the screw plugs of the f1 setpoint poten- tiometer or the X50 diagnostic interface are installed incorrectly or not at all. ®…
-
Page 74
«Easy» startup with RS485 interface/fieldbus Coding of process data ® MOVIMOT Master 339252747 = Process output data = Process input data = Control word = Status word 1 = Speed [%] = Output current = Ramp = Status word 2 8.4.1 2 process data words ®… -
Page 75
«Easy» startup with RS485 interface/fieldbus Coding of process data 8.4.3 Process output data ® Process output data is sent from the higher-level controller to the MOVIMOT inverter (control information and setpoints). However, they only become effective in the ® ® MOVIMOT inverter if the RS485 address in MOVIMOT (DIP switches S1/1 to S1/4) -
Page 76
«Easy» startup with RS485 interface/fieldbus Coding of process data Control word, bit 9 = apply brake when control command «Stop» is issued ® If bit 9 is set after activating the control command «Stop», the MOVIMOT inverter ap- plies the brake and inhibits the output stage. Speed [%] The speed setpoint is given as a percentage and refers to the maximum speed which you set on the setpoint potentiometer f1. -
Page 77
«Easy» startup with RS485 interface/fieldbus Coding of process data 8.4.4 Process input data ® The MOVIMOT inverter sends back process input data to the higher-level controller. The process input data consists of status information and actual value information. ® The MOVIMOT inverter supports the following process input data: •… -
Page 78
«Easy» startup with RS485 interface/fieldbus Coding of process data PI3: Status word 2 (only for 3-word protocol) 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Output stage enabled = «1» Inverter ready = «1» PO data enabled = «1»… -
Page 79
«Easy» startup with RS485 interface/fieldbus Coding of process data Assignment status word 1 Meaning Explanation ® Output stage 1: MOVIMOT drive is enabled. enabled ® 0: MOVIMOT drive is not enabled. ® Inverter 1: MOVIMOT drive is ready for operation. ready ®… -
Page 80
«Easy» startup with RS485 interface/fieldbus Coding of process data Assignment of status word 2 Meaning Explanation ® Output stage 1: MOVIMOT drive is enabled. enabled ® 0: MOVIMOT drive is not enabled. ® Inverter 1: MOVIMOT drive is ready for operation. ready ®… -
Page 81: Function With Rs485 Master
«Easy» startup with RS485 interface/fieldbus Function with RS485 master Function with RS485 master ® • The higher-level controller (e.g. PLC) is the master, the MOVIMOT inverter is the slave. • 1 start bit, 1 stop bit and 1 parity bit (even parity) will be used. ®…
-
Page 82
«Easy» startup with RS485 interface/fieldbus Function with RS485 master 8.5.2 Idle and start delimiter ® The MOVIMOT inverter detects the start of a request message by means of an idle period lasting at least 3.44 ms, followed by the character 02 (start delimiter 1). -
Page 83
«Easy» startup with RS485 interface/fieldbus Function with RS485 master Example The following figure gives an example of how a block check character is created for an acyclical message of type PDU 85 with 3 process data items. The XOR logic opera- tion on the characters SD1 –… -
Page 84
«Easy» startup with RS485 interface/fieldbus Function with RS485 master ® 8.5.8 Message processing in the MOVILINK master ® The following algorithm must be used for sending and receiving MOVILINK mes- sages in any programmable controllers, in order to ensure correct data transmission. a) Send request message ®… -
Page 85
«Easy» startup with RS485 interface/fieldbus Function with RS485 master 8.5.9 Sample message ® This example deals with the control of a MOVIMOT drive using three process data words of PDU type 85 (3 PD acyclical). The RS485 master sends three process out- ®… -
Page 86: Startup With Mfp Profibus Interface
«Easy» startup with RS485 interface/fieldbus Startup with MFP PROFIBUS interface Startup with MFP PROFIBUS interface INFORMATION Switch off the DC 24 V supply before removing/mounting the fieldbus interface. ® 1. Remove the MOVIMOT inverter from the connection box. ® 2. Check whether the MOVIMOT drive is installed mechanically and electrically in accordance with the regulations.
-
Page 87
«Easy» startup with RS485 interface/fieldbus Startup with MFP PROFIBUS interface WARNING Electric shock from capacitors that have not been fully discharged. Severe or fatal injuries. • Disconnect the inverter from the power. Observe the minimum switch-off time after disconnection from the supply system: –… -
Page 88
Refer to the relevant configuration software manuals for details on the procedure. INFORMATION The latest version of the GSD files is always available on the Internet at the following address: http://www.SEW-EURODRIVE.de Project planning for the PROFIBUS DP interface MFP 1. Observe the notes in the README.TXT file on the GSD disk. -
Page 89: Function Of Mfp Profibus Interface
«Easy» startup with RS485 interface/fieldbus Function of MFP PROFIBUS interface Function of MFP PROFIBUS interface 8.7.1 Meaning of the LED indicators The PROFIBUS interface MFP has 3 diagnostic LEDs. • «RUN» LED (green) for displaying the normal operating state. • «BUS-F»…
-
Page 90
«Easy» startup with RS485 interface/fieldbus Function of MFP PROFIBUS interface «RUN» LED (green) RUN BUS-F SYS-F Meaning Troubleshooting • MFP components hardware – • Correct MFP operation – • MFP is currently exchan- ging data with the DP mas- ter (data exchange) and ®… -
Page 91
«Easy» startup with RS485 interface/fieldbus Function of MFP PROFIBUS interface BUS-F SYS-F Meaning Troubleshooting Flashes • MFP operating state • Evaluate the fault number ® of MOVIMOT status 1 × word 1 in the controller. ® • MOVIMOT signals ® a fault •… -
Page 92: Expert» Startup With Parameter Function
«Expert» startup with parameter function «Expert» startup with parameter function INFORMATION Startup in expert mode is only required if you want to set parameters during startup. Startup in expert mode is only possible if: • No additional function is activated (DIP switch S2/5 — S2/8 is set to «OFF») •…
-
Page 93: Operation
Operation Operating notes Operation 10.1 Operating notes WARNING Electric shock caused by dangerous voltages at the connections, cables and motor terminals. When the device is switched on, dangerous voltages are present at the connections as well as at any connected cables and motor terminals. This also applies even when the device is inhibited and the motor is at standstill.
-
Page 94: Operating Display
Operation Operating display 10.2 Operating display ® The status LED is located on the top of the MOVIMOT inverter. 1 min 18014398969241739 ® [1] MOVIMOT status LED 10.3 Drive ID module The pluggable Drive ID module is installed in the basic unit. ®…
-
Page 95
Operation Drive ID module If, during a device replacement • the DIP switch setting is not transmitted correctly, ® • or a MOVIMOT inverter with a different part number is used (e.g. with a different device power,) ® the MOVIMOT inverter detects a change in configuration. -
Page 96: Service
Service Status and error display Service 11.1 Status and error display 11.1.1 Meaning of the status LED ® The status LED is located on the top of the MOVIMOT inverter. ® The 3-color status LED indicates the operating and error states of the MOVIMOT verter.
-
Page 97
Service Status and error display Meaning Possible cause Color Operating state State error code Fault 08 Speed monitoring error (only when S2/4 = «ON») Flashing slowly or additional function 13 is active. Fault 09 Startup fault Additional functions 4, 5, 12 (DIP switches S2/5 – S2/8) are not permitted. -
Page 98
Service Status and error display 11.1.2 Error list The following table helps you with troubleshooting: Code Error Possible cause Measure – Communication Missing connection’ and Check and establish the connection, espe- timeout RS+, RS- between cially ground. ® MOVIMOT and RS485 (motor stops, without master error code) -
Page 99
Correct the settings of DIP switches S2/5 – 5, 12 are not permitted for S2/8. ® MOVIMOT MM..D with AS-Interface. Firmware does not support Contact SEW-EURODRIVE Service. MLK..A option (only with ® MOVIMOT with AS-Inter- face). Thermal Heat sink is dirty. -
Page 100
Contact SEW EURODRIVE Service if the error re-occurs. External terminal External signal at terminal Correct/reset external fault. X6: 9,10 not present. System software Internal fault Contact SEW-EURODRIVE Service. error Communication Communication timeout Check/re-establish the communication link timeout during cyclical communica- between the RS485 master and the ®… -
Page 101
Thermal overload of brake Extend the ramp time. ture coil Reset the fault Brake coil is defective. Contact SEW-EURODRIVE Service. Brake coil and braking re- Connect either brake or braking resistor to sistor connected. drive. Inverter does not match the Check the combination of motor (brake coil) ®… -
Page 102: Inspection And Maintenance
MOVIMOT inverter. The fieldbus interface re- ports the error only to the higher-level control- ler. EEPROM checksum Defective EEPROM Contact SEW-EURODRIVE Service. error Copy error DBG keypad or PC/laptop Before acknowledging the error, load the fac- disconnected during the tory setting or the complete data set from the ®…
-
Page 103: Unit Replacement
Service Unit replacement ® 11.2.3 Gear unit (only for MOVIMOT gearmotors) The gear unit requires regular inspection and maintenance work. Observe the notes and instructions in chapter «Inspection/Maintenance» of the gear unit operating instructions. 11.3 Unit replacement WARNING Electric shock from capacitors that have not been fully discharged. Severe or fatal injuries.
-
Page 104
Service Unit replacement ® 4. Unlock the drive ID module of the new MOVIMOT inverter and pull it out carefully. 18014399028685579 ® 5. Unlock the drive ID module of the previous MOVIMOT inverter as well and pull it out carefully. ®… -
Page 105: Electronics Service By Sew-Eurodrive
Electronics Service by SEW‑EURODRIVE If you are unable to rectify a fault, contact SEW‑EURODRIVE Service. For the ad- dresses, refer to www.sew-eurodrive.com. When contacting SEW‑EURODRIVE Service, always specify the following information so that our service personnel can assist you more effectively: •…
-
Page 106
Service Waste disposal If you have not performed maintenance regularly, SEW‑EURODRIVE recommends that you increase the line voltage slowly up to the maximum voltage. This can be done, for example, by using a variable transformer for which the output voltage has been set according to the following overview. -
Page 107: Technical Data
Technical data Motor with operating point 400 V/50 Hz or 400 V/100 Hz Technical data Motor with operating point 400 V/50 Hz or 400 V/100 H 12.1 Motor with operating point 400 V/50 Hz or 400 V/100 Hz ® MOVIMOT type 03D- 05D- 07D- 11D- 15D-50 22D-50 30D-50 40D-50 503-14 503-14 503-14 503-14 3-14 3-14…
-
Page 108
Technical data Motor with operating point 400 V/50 Hz or 400 V/100 Hz ® MOVIMOT type 03D- 05D- 07D- 11D- 15D-50 22D-50 30D-50 40D-50 503-14 503-14 503-14 503-14 3-14 3-14 3-14 3-14 Part number 282627 282627 282627 282627 282627 282627 282627 282627 Size 1 Size 2 Size 2L Degree of protection… -
Page 109
Technical data Motor with operating point 400 V/50 Hz or 400 V/100 Hz ® MOVIMOT type 03D- 05D- 07D- 11D- 15D-50 22D-50 30D-50 40D-50 503-14 503-14 503-14 503-14 3-14 3-14 3-14 3-14 Part number 282627 282627 282627 282627 282627 282627 282627 282627 Size 1 Size 2 Size 2L Output relay… -
Page 110: Technical Data Of Option Mla12A 3D
Technical data Technical data of option MLA12A 3D 12.2 Technical data of option MLA12A 3D MLA12A 3D Part number 0 823 234 2 Function Setpoint converter Input voltage X9 / X10 AC 400 – 500 V ± 10% Output voltage DC 24 V ± 25 % (max. 200 mA) 0 V reference potential Terminals Tl.
-
Page 111: Diagnostic Interface
Technical data Diagnostic interface 12.4 Diagnostic interface Diagnostic interface X50 Standard RS485 to EIA standard (with integrated dynamic terminating resistor) Baud rate 9.6 kbaud Start bits 1 start bit Stop bits 1 stop bit Data bits 8 data bits Parity 1 parity bit, completing for even parity (even parity) Data direction…
-
Page 112
Technical data Permitted operating modes 12.6.1 4Q operation with motors with a mechanical brake • In 4Q operation, the brake coil can be used as a braking resistor. • You must not connect an external braking resistor. • Brake voltage is generated internally within the unit, which means it independent of the grid. -
Page 113
The brake resistor is integrated in the connection box of MOVIMOT as standard in motors without mechanical brake. • For applications with low regenerative energy, SEW-EURODRIVE recommends 4Q operation. • The resistor protects itself (reversible) against regenerative overload by changing abruptly to high resistance and no longer consuming any more energy. The in- verter then switches off and issues an «overvoltage»… -
Page 114: Overhung And Axial Loads For Motor Shaft Ends
Technical data Overhung and axial loads for motor shaft ends 12.7 Overhung and axial loads for motor shaft ends 12.7.1 Permitted overhung load You can read the maximum permitted overhung load F of the respective motor de- pending on the point of force application relative to the shaft shoulder from the follow- ing diagrams.
-
Page 115
Technical data Overhung and axial loads for motor shaft ends The following diagram shows an example of how you can read the maximum over- hung load from the diagram: 1400 1200 Ø14×30 1000 Ø19×40 x/mm 18014402489974539 Motor with shaft diameter 14 mm, force application x at 22 mm, maximum permit- ted overhung load F = 600 N Motor with shaft diameter 19 mm, force application x at 30 mm, maximum permit-… -
Page 116
Technical data Overhung and axial loads for motor shaft ends The information considers the rated speed n and the higher-level rated torque M continuous duty (S1) of the motor. For duty types other than S1 (e.g. S2, S3, etc.), the permitted values for F and F have to be multiplied with the factor 0.8. -
Page 117
Technical data Overhung and axial loads for motor shaft ends Overhung load diagram EDRN80 1400 Ø19X40 1200 1000 x [mm] 28379276939 Overhung load diagram EDRN90 2500 Ø24X50 2000 1500 1000 x [mm] 28379349771 ® Operating Instructions – Explosion-Protected MOVIMOT MM..D Drives… -
Page 118: Permitted Rolling Bearing Types
Technical data Permitted rolling bearing types Overhung load diagram EDRN100 3000 Ø28X60 2500 2000 1500 1000 x / mm 28379396491 12.8 Permitted rolling bearing types Motor type A-side bearing B-side bearing IEC motor Gearmotor AC motor Brakemotor EDRN71 6204-2Z-J-C3 6303-2Z-J-C3 6203-2Z-J-C3 6203-2RS-J-C3 EDRN80…
-
Page 119: Lubricant Tables
Technical data Lubricant tables 12.9 Lubricant tables 12.9.1 Lubricant table for rolling bearings INFORMATION Use of wrong bearing grease can damage the bearings. Motors with sealed bearings The bearings are 2Z or 2RS closed bearings and cannot be re-lubricated. They are used for EDR..71 –…
-
Page 120: 12.11 Operating Characteristics
Technical data Operating characteristics 12.11 Operating characteristics ® • The operating characteristics indicate the torques with which the MOVIMOT units may be loaded depending on the speed. • Permanent overload results in excessive heating. • Short-term overloads are permitted. W 3 × 400 – 500 V (400 V) 12.11.1 1400 min 1000 1500…
-
Page 121: 12.12 Braking Torque Assignment
Technical data Braking torque assignment 12.12 Braking torque assignment Motor type Brake type Braking torque steps EDRN71S BE05 EDRN71M EDRN80MK EDRN80M EDRN90 EDRN100 12.13 Braking work, working air gap, and brake lining carrier thickness If the brake is used in combination with a safety encoder, or if the brake is designed as safety brake, the maximum values for the working air gap and for the braking work un- til maintenance are reduced.
-
Page 122: 12.15 Assignment Of Internal Braking Resistors
Technical data Assignment of internal braking resistors 12.15 Assignment of internal braking resistors The delivery includes 2 screws of size M4 × 8 each. ® MOVIMOT type Braking resistor MM03D-503-14 – MM15D-503-14 BW1, part number 08228973 MM22D-503-14 – MM40D-503-14 BW2, part number 08231362 12.16 PROFIBUS interface MFP21D/Z21D/3D Electrical specification MFP Power supply to MFP control…
-
Page 123
Technical data PROFIBUS interface MFP21D/Z21D/3D PROFIBUS specifications Supported baud rates 9.6 kBaud – 1.5 MBaud / 3 – 12 MBaud (with automatic detection) Bus termination Integrated, can be set via DIP switch to EN 50170 (V2) Permitted cable length for • 9.6 kBaud: 1200 m To extend the length, several seg- PROFIBUS ments can be coupled using repeat- •… -
Page 124: Declaration Of Conformity
Declaration of conformity Declaration of conformity EU Declaration of Conformity Translation of the original text 901170411/EN SEW-EURODRIVE GmbH & Co. KG Ernst-Blickle-Straße 42, D-76646 Bruchsal declares under sole responsibility that the following products ® Frequency inverters of the series MOVIMOT MM..D-..3-04…
-
Page 125
Declaration of conformity EU Declaration of Conformity Translation of the original text 900520610/EN SEW-EURODRIVE GmbH & Co. KG Ernst-Blickle-Straße 42, D-76646 Bruchsal declares under sole responsibility that the following products Fieldbus interface of the series MFI21./…/3D MFP21./…/3D MLA12./3D Category Designation II 3D Ex tc IIIC T120°C Dc… -
Page 126: Index
Index Index Numerical Configuration PROFIBUS master ……… 88 24 V supply………… 43 Connection 4Q operation………. 112, 113 Digital inputs/outputs …….. 51 Inputs/outputs………. 51 Fieldbus interface ……….. 44 Additional function 1 ………. 61 Fieldbus interface of the drive …… 50 Additional function 10 ………. 62 Fieldbus interface, close to the motor ….
-
Page 127
Index Documents, additional ……… 10 Idle…………… 82 Drive ID module……….. 94 Improving the grounding…….. 40 Description …………. 94 In the open, installation in…….. 30 Disassembly ………. 104 Inputs/outputs, connection …….. 51 Technical Data ………. 111 Inspection ………… 102 Dusts ………….. 43 installation Electrical………… -
Page 128
Index ® MOVIMOT replacement …….. 103 Radiation, hazardous ………. 43 Ramp times ………… 58 Nameplate Ramp times, increased…….. 61 Fieldbus interface ……….. 24 Repair ………….. 105 Inverter ………… 22 Replacing units ………. 103 ® MOVIMOT drive………. 21 Request message ………. 85 Notes Requirements for startup ……. -
Page 129
Index Shut down ………… 105 Terminals Signal words in safety notes…….. 8 Connection cross section ……. 46 Start delimiter ………… 82 Current carrying capacity ……. 46 Startup Terminals, actuating ………. 37 Easy with fieldbus interface…… 70 Tightening torques………. 31 Expert mode ……….. 92 Timeout monitoring………. -
Page 132
SEW-EURODRIVE—Driving the world SEW-EURODRIVE GmbH & Co KG Ernst-Blickle-Str. 42 76646 BRUCHSAL GERMANY Tel. +49 7251 75-0 Fax +49 7251 75-1970 sew@sew-eurodrive.com www.sew-eurodrive.com…
![]()
Drive Technology \ Drive Automation \ System Integration \ Services
Operating Instructions
MOVIMOT® MM..D
With DRS/DRE/DRP AC Motor
|
Edition 12/2010 |
17000017 / EN |
SEW-EURODRIVE—Driving the world

Contents
Contents
|
1 |
General Information ……………………………………………………………………………….. |
6 |
|
|
1.1 |
How to use this documentation…………………………………………………………. |
6 |
|
|
1.2 |
Structure of the safety notes …………………………………………………………….. |
6 |
|
|
1.3 |
Rights to claim under limited warranty ……………………………………………….. |
7 |
|
|
1.4 |
Exclusion of liability…………………………………………………………………………. |
7 |
|
|
1.5 |
Copyright……………………………………………………………………………………….. |
7 |
|
|
1.6 |
Product names and trademarks………………………………………………………… |
7 |
|
2 |
Safety Notes ………………………………………………………………………………………….. |
8 |
|
|
2.1 |
Preliminary information ……………………………………………………………………. |
8 |
|
|
2.2 |
General information ………………………………………………………………………… |
8 |
|
|
2.3 |
Target group ………………………………………………………………………………….. |
8 |
|
|
2.4 |
Designated use ………………………………………………………………………………. |
9 |
|
|
2.5 |
Other applicable documentation ……………………………………………………….. |
9 |
|
|
2.6 |
Transportation, storage………………………………………………………………….. |
10 |
|
|
2.7 |
Installation……………………………………………………………………………………. |
10 |
|
|
2.8 |
Electrical connection ……………………………………………………………………… |
10 |
|
|
2.9 |
Safe disconnection………………………………………………………………………… |
10 |
|
|
2.10 |
Operation …………………………………………………………………………………….. |
11 |
|
3 Unit Design ………………………………………………………………………………………….. |
12 |
|
|
3.1 |
MOVIMOT® drive………………………………………………………………………….. |
12 |
|
3.2 |
MOVIMOT® inverter………………………………………………………………………. |
13 |
|
3.3 |
Type designation of MOVIMOT® drive……………………………………………… |
15 |
|
3.4 |
Type designation of MOVIMOT® inverter …………………………………………. |
16 |
|
3.5 |
Type designation of the variant «mounted close to the motor»……………… |
17 |
|
4 Mechanical Installation…………………………………………………………………………. |
18 |
|
|
4.1 |
MOVIMOT® gearmotor installation ………………………………………………….. |
18 |
|
4.2 |
Installation of MOVIMOT® options …………………………………………………… |
20 |
|
4.3 |
Installation of the MOVIMOT® inverter close to the motor …………………… |
27 |
|
4.4 |
Tightening torques ………………………………………………………………………… |
28 |
|
5 Electrical Installation ……………………………………………………………………………. |
30 |
|
|
5.1 |
Installation instructions…………………………………………………………………… |
30 |
|
5.2 |
Connection of the MOVIMOT® drive………………………………………………… |
36 |
|
5.3 |
MOVIMOT® plug connectors ………………………………………………………….. |
37 |
5.4Connection between MOVIMOT® and motor
|
when mounted close to the motor……………………………………………………. |
38 |
|
|
5.5 |
Connection of the MOVIMOT® options ……………………………………………. |
42 |
|
5.6 |
Connection of RS-485 bus master…………………………………………………… |
53 |
|
5.7 |
Connecting the DBG keypad ………………………………………………………….. |
54 |
|
5.8 |
PC connection………………………………………………………………………………. |
55 |
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
3 |
||

Contents
|
6 |
«Easy» Startup……………………………………………………………………………………… |
56 |
|
|
6.1 |
Overview ……………………………………………………………………………………… |
56 |
|
|
6.2 |
Important notes on startup ……………………………………………………………… |
57 |
|
|
6.3 |
Requirements……………………………………………………………………………….. |
58 |
|
|
6.4 |
Description of control elements……………………………………………………….. |
58 |
|
|
6.5 |
Description of the DIP switches S1………………………………………………….. |
61 |
|
|
6.6 |
Description of DIP switches S2……………………………………………………….. |
63 |
|
|
6.7 |
Selectable additional functions MM..D-503-00 ………………………………….. |
67 |
|
|
6.8 |
Startup with binary control ……………………………………………………………… |
91 |
|
|
6.9 |
Startup with options MBG11A or MLG..A …………………………………………. |
93 |
|
|
6.10 |
Startup with MWA21A option ………………………………………………………….. |
95 |
|
|
6.11 |
Startup with MWF11A option ………………………………………………………….. |
98 |
|
|
6.12 |
Supplementary notes for installation close to the motor …………………… |
100 |
|
7 |
«Easy» Startup with RS-485 Interface/Fieldbus…………………………………….. |
103 |
|
|
7.1 |
Important notes on startup ……………………………………………………………. |
103 |
|
|
7.2 |
Requirements……………………………………………………………………………… |
104 |
|
|
7.3 |
Startup procedure ……………………………………………………………………….. |
104 |
|
|
7.4 |
Coding of process data ………………………………………………………………… |
106 |
|
|
7.5 |
Function with RS-485 master………………………………………………………… |
111 |
|
8 |
«Expert» Startup with Parameter Function …………………………………………… |
116 |
|
|
8.1 |
Important notes on startup ……………………………………………………………. |
116 |
|
|
8.2 |
Requirements……………………………………………………………………………… |
117 |
|
|
8.3 |
MOVITOOLS® MotionStudio…………………………………………………………. |
117 |
|
|
8.4 |
Startup and function expansion with individual parameters……………….. |
119 |
|
|
8.5 |
Startup and configuration with a central controller and MQP……………… |
122 |
|
|
8.6 |
Startup by transferring the set of parameters ………………………………….. |
123 |
|
|
8.7 |
Parameter list……………………………………………………………………………… |
125 |
|
|
8.8 |
Parameter description………………………………………………………………….. |
131 |
|
9 Operation …………………………………………………………………………………………… |
151 |
|
|
9.1 |
Operating display ………………………………………………………………………… |
151 |
|
9.2 |
Drive ID module ………………………………………………………………………….. |
152 |
|
9.3 |
Keypads …………………………………………………………………………………….. |
153 |
|
9.4 |
MWA21A setpoint converter …………………………………………………………. |
154 |
|
9.5 |
MWF11A setpoint converter …………………………………………………………. |
155 |
|
9.6 |
MOVIMOT® manual operation with MOVITOOLS® MotionStudio ………. |
160 |
|
9.7 |
DBG keypad……………………………………………………………………………….. |
164 |
|
4 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||

Contents
|
10 Service ………………………………………………………………………………………………. |
172 |
|
|
10.1 |
Status and error display ……………………………………………………………….. |
172 |
|
10.2 |
Inspection/maintenance ……………………………………………………………….. |
176 |
|
10.3 |
Diagnostics with MWF11A option ………………………………………………….. |
177 |
|
10.4 |
Unit replacement…………………………………………………………………………. |
178 |
|
10.5 |
Rotating the connection box …………………………………………………………. |
180 |
|
10.6 |
SEW Service………………………………………………………………………………. |
182 |
|
10.7 |
Shut down ………………………………………………………………………………….. |
182 |
|
10.8 |
Storage ……………………………………………………………………………………… |
183 |
|
10.9 |
Extended storage………………………………………………………………………… |
183 |
|
10.10 |
Disposal …………………………………………………………………………………….. |
183 |
|
11 |
Technical Data……………………………………………………………………………………. |
184 |
|
|
11.1 |
Motor with operating point 400 V / 50 Hz or 400 V / 100 Hz………………. |
184 |
|
|
11.2 |
Motor with operating point 460 V / 60 Hz………………………………………… |
186 |
|
|
11.3 |
Motor with operating point 230 V / 60 Hz………………………………………… |
188 |
|
|
11.4 |
Technical data of options & accessories…………………………………………. |
190 |
|
|
11.5 |
Work done, working air gap and braking torque of the brake …………….. |
195 |
|
|
11.6 |
Braking torque assignment …………………………………………………………… |
195 |
|
|
11.7 |
Integrated RS-485 interface………………………………………………………….. |
196 |
|
|
11.8 |
Diagnostics interface……………………………………………………………………. |
196 |
|
|
11.9 |
Assignment of internal braking resistors …………………………………………. |
196 |
|
|
11.10 |
Assignment of external braking resistors ………………………………………… |
197 |
|
|
11.11 |
Resistance and assignment of the brake coil ………………………………….. |
197 |
|
|
11.12 |
Assignment of the Drive-ID module ……………………………………………….. |
198 |
|
|
12 |
Declaration of Conformity …………………………………………………………………… |
199 |
|
|
13 |
Address List ………………………………………………………………………………………. |
200 |
|
|
Index |
………………………………………………………………………………………………….. |
210 |
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
5 |
||
General Information
How to use this documentation
1 General Information
1.1How to use this documentation
The documentation is an integral part of the product and contains important information on operation and service. The documentation is written for all employees who assemble, install, startup, and service this product.
The documentation must be accessible and legible. Make sure that persons responsible for the system and its operation, as well as persons who work independently on the unit, have read through the documentation carefully and understood it. If you are unclear about any of the information in this documentation, or if you require further information, contact SEW-EURODRIVE.
1.2Structure of the safety notes
1.2.1Meaning of the signal words
The following table shows the grading and meaning of the signal words for safety notes, notes on potential risks of damage to property, and other notes.
|
Signal word |
Meaning |
Consequences if disregarded |
|
DANGER |
Imminent danger |
Severe or fatal injuries |
|
WARNING |
Possible dangerous situation |
Severe or fatal injuries |
|
CAUTION |
Possible dangerous situation |
Minor injuries |
|
NOTICE |
Possible damage to property |
Damage to the drive system or its envi- |
|
ronment |
||
|
INFORMATION |
Useful information or tip: Simpli- |
|
|
fies the handling of the drive |
||
|
system. |
||
1.2.2Structure of the section-related safety notes
Section safety notes do not apply to a specific action, but to several actions pertaining to one subject. The used symbols indicate either a general or a specific hazard.
This is the formal structure of a section safety note:
SIGNAL WORD
Type and source of danger.
Possible consequence(s) if disregarded.
•Measure(s) to prevent the danger.
1.2.3Structure of the embedded safety notes
Embedded safety notes are directly integrated in the instructions just before the description of the dangerous action.
This is the formal structure of an embedded safety note:
• SIGNAL WORD Nature and source of hazard. Possible consequence(s) if disregarded.
SIGNAL WORD Nature and source of hazard. Possible consequence(s) if disregarded.
– Measure(s) to prevent the danger.
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor

|
General Information |
1 |
|
Rights to claim under limited warranty |
||
1.3Rights to claim under limited warranty
A requirement of fault-free operation and fulfillment of any rights to claim under limited warranty is that you adhere to the information in the documentation. Read the documentation before you start working with the unit!
1.4Exclusion of liability
You must comply with the information contained in this documentation to ensure safe operation of MOVIMOT® and to achieve the specified product characteristics and performance features. SEW-EURODRIVE assumes no liability for injury to persons or damage to equipment or property resulting from non-observance of these operating instructions. In such cases, any liability for defects is excluded.
1.5Copyright
© 2010 – SEW-EURODRIVE. All rights reserved.
Unauthorized duplication, modification, distribution or any other use of the whole or any part of this documentation is strictly prohibited.
1.6Product names and trademarks
All brands and product names in this documentation are trademarks or registered trademarks of their respective titleholders.
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
7 |
||

|
2 |
Safety Notes |
|
Preliminary information |
||
2 Safety Notes
The following basic safety notes must be read carefully to prevent injury to persons and damage to property. The operator must ensure that the basic safety notes are read and adhered to. Make sure that persons responsible for the plant and its operation, as well as persons who work independently on the unit, have read through the operating instructions carefully and understood them. If you are unclear about any of the information in this documentation or if you require further information, please contact SEWEURODRIVE.
2.1Preliminary information
The following safety notes are primarily concerned with the use of MOVIMOT® drives. If you use other SEW components, also refer to the safety notes for the respective components in the corresponding documentation.
Please also observe the supplementary safety notes in the individual chapters of this documentation.
2.2General information
Never install or start up damaged products. Submit a complaint to the shipping company immediately in the event of damage.
During operation, MOVIMOT® drives can have live, bare and movable or rotating parts as well as hot surfaces, depending on their enclosure.
Removing covers without authorization, improper use as well as incorrect installation or operation may result in severe injuries to persons or damage to property. Refer to the documentation for additional information.
2.3Target group
Only qualified personnel is authorized to install, startup or service the units or correct unit faults (observing IEC 60364 and/or CENELEC HD 384 or DIN VDE 0100 and IEC 60664 or DIN VDE 0110 as well as national accident prevention guidelines).
Qualified personnel in the context of these basic safety notes are persons familiar with installation, assembly, startup and operation of the product who possess the necessary qualifications.
Any activities regarding transportation, storage, operation, and disposal must be carried out by persons who have been instructed appropriately.
|
8 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||

|
Safety Notes |
2 |
|
Designated use |
||
2.4Designated use
MOVIMOT® inverters are components intended for installation in electrical systems or machines.
In case of installation in machines, startup of MOVIMOT® inverters (i.e. start of designated operation) is prohibited until it is determined that the machine meets the requirements stipulated in the Machinery Directive 2006/42/EC.
Startup (i.e. the start of designated use) is only permitted under observance of the EMC directive 2004/108/EC.
MOVIMOT® inverters comply with the regulations of the Low Voltage Directive 2006/95/ EC. The standards given in the declaration of conformity are used for the MOVIMOT® inverter.
You must observe the technical data and information on the connection requirements as provided on the nameplate and in the documentation.
2.4.1Safety functions
The MOVIMOT® inverter may not perform safety functions unless these functions are described and expressly permitted.
2.4.2Hoist applications
MOVIMOT® inverters are suitable for hoist applications to a limited degree only, see sec. «Additional function 9» (page 78).
MOVIMOT® inverters are not designed for use as a safety device in hoist applications.
2.5Other applicable documentation
Note also the following documentation:
•«MOVIMOT® Gearmotors» catalog
•«DR.71-225, 315 AC Motors» operating instructions
•Operating instructions for the gear unit (only for MOVIMOT® gearmotors)
You can download or order these publications on the Internet (http://www.sew-euro- drive.de, under the heading «Documentation»).
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
9 |
||

|
2 |
Safety Notes |
|
Transportation, storage |
||
2.6Transportation, storage
You must observe the notes on transportation, storage and proper handling. Comply with the requirements for climatic conditions stated in chapter «Technical Data». Tighten installed eyebolts securely. They are designed for the weight of the MOVIMOT® drive. Do not attach any additional loads. Use suitable, sufficiently rated handling equipment (e.g. rope guides) if required.
2.7Installation
The units must be installed and cooled according to the regulations and specifications in the corresponding documentation.
Protect the MOVIMOT® inverters from improper strain.
The following applications are prohibited unless the unit is explicitly designed for such use:
•Use in potentially explosive atmospheres.
•Use in areas exposed to harmful oils, acids, gases, vapors, dust, radiation, etc.
•Use in non-stationary applications with strong mechanical oscillation and impact loads; see chapter «Technical Data».
2.8Electrical connection
Observe the applicable national accident prevention guidelines when working on live MOVIMOT® drive inverters (e.g. BGV A3).
Perform electrical installation according to the pertinent regulations (e.g. cable cross sections, fusing, protective conductor connection). For any additional information, refer to the applicable documentation.
For notes on EMC compliant installation, such as shielding, grounding, arrangement of filters and routing of lines, refer to chapter «Installation instructions». The manufacturer of the system or machine is responsible for maintaining the limits established by EMC legislation.
Protective measures and protection devices must comply with the regulations in force (e.g. EN 60204 or EN 61800-5-1).
A voltage test according to EN 61800-5-1:2007 chapter 5.2.3.2 is required for the MOVIMOT® drives prior to startup in order to ensure the insulation.
2.9Safe disconnection
MOVIMOT® inverters meet all requirements for safe disconnection of power and electronic connections in accordance with EN 61800-5-1. All connected circuits must also satisfy the requirements for safe disconnection.
|
10 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
![]()
Safety Notes
Operation
2.10Operation
Systems with integrated MOVIMOT® inverters must be equipped with additional monitoring and protection devices according to the applicable safety guidelines, such as the law governing technical equipment, accident prevention regulations, etc. Additional protective measures may be necessary for applications with increased potential risk.
Do not touch live components and power connections immediately after separation of the MOVIMOT® inverter from the supply voltage because there may still be some charged capacitors. Wait at least for 1 minute after having switched off the supply voltage.
As soon as supply voltages are present at the MOVIMOT® inverter, the connection box must be closed (i.e. the MOVIMOT® inverter and, if applicable, the connector of the hybrid cable must be connected).
The fact that the status LED and other display elements are no longer illuminated does not indicate that the unit has been disconnected from the supply system and no longer carries any voltage.
Mechanical blocking or internal safety functions of the unit can cause a motor standstill. Eliminating the cause of the problem or performing a reset may result in the drive restarting automatically. If, for safety reasons, this is not permitted for the driven machine, disconnect the unit from the supply system before correcting the error.
Caution: Danger of burns: The surface temperature of the MOVIMOT® drive and of external options, e.g. the heat sink of the braking resistor, can exceed 60 °C during operation!
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor
|
3 |
Unit Design |
MOVIMOT® drive |
3 Unit Design
3.1MOVIMOT® drive
The following figure shows a MOVIMOT® drive with helical gear unit:
[1]
[2]
[3]
[4]
3531634827
[1]MOVIMOT® inverter
[2]Connection box
[3]Motor
[4]Helical gear unit
A MOVIMOT® drive is a combination of:
•MOVIMOT® inverter
–Mounted on the motor (see example above)
–or mounted close to the motor
•Motor (see motor operating instructions)
•Gear unit (optional, see gear unit operating instructions)
|
12 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
|
Unit Design |
3 |
MOVIMOT® inverter |
3.2MOVIMOT® inverter
The following figure shows the connection box and the MOVIMOT® inverter:
|
[5] |
[6] |
[7] |
[8] |
[9] |
[10] |
[11] [7] |
|
0 1 2 |
0 1 2 |
|||||
|
[5] [12] |
[13] |
[14] |
[15] |
[16] |
[17] |
[18] |
|
615683595 |
[1]Connection box
[2]X10: Plug connector for BEM option
[3]Plug connector for MOVIMOT® inverter
[4]MOVIMOT® inverter with heat sink
[5]Cable glands
[6]Connection unit with terminals
[7]Screw for PE connection
[8]X5, X6: Electronics terminal strips
[9]X1: Connection for brake coil (motors with brake) or braking resistor (motors without brake)
[10]X1: Supply system connection L1, L2, L3
[11]Connection type identification
[12]Drive-ID module
[13]Nameplate of the MOVIMOT® inverter
[14]Setpoint switch f2 (green)
[15]DIP switches S2/5 – S2/8
[16]Switch t1 for integrator ramp (white)
[17]DIP switches S1/1 – S1/8
[18]DIP switches S2/1 – S2/4
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
13 |
||
|
3 |
Unit Design |
|
MOVIMOT® inverter |
The following figure shows the top of the MOVIMOT® inverter:
[1]X50: Diagnostics interface with screw plug
[2]Setpoint potentiometer f1 with screw plug
[3]Status LED
[4]Unit identification
|
14 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
|
Unit Design |
3 |
Type designation of MOVIMOT® drive |
3.3Type designation of MOVIMOT® drive
3.3.1Nameplate
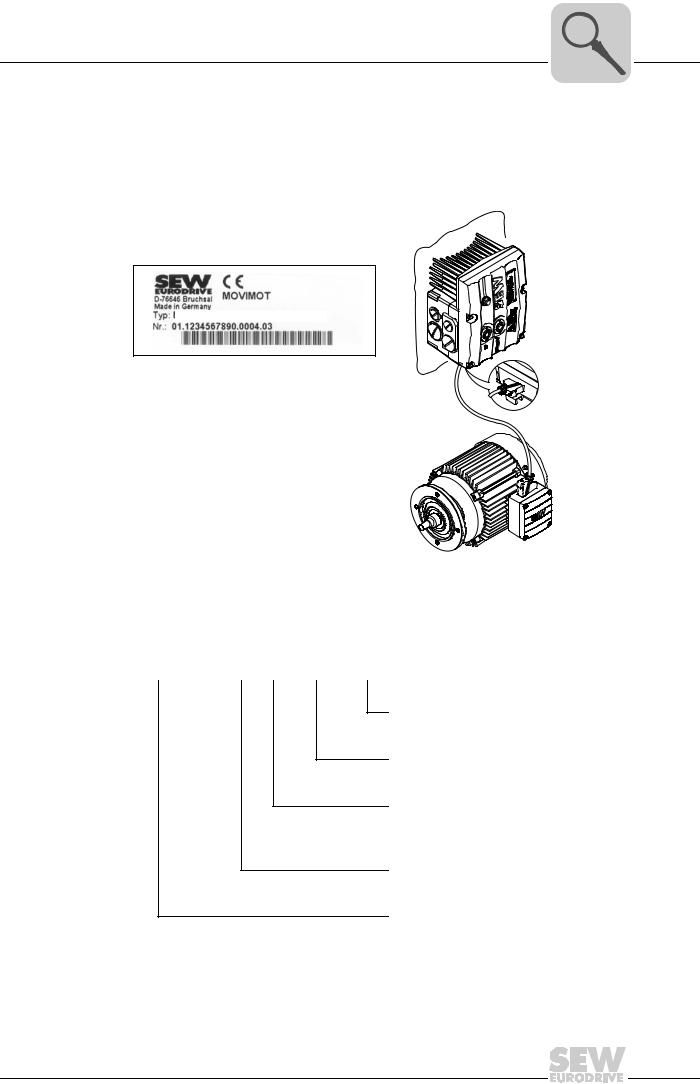
The following figure gives an example of a nameplate of a MOVIMOT® drive. The nameplate is attached to the motor.
|
76646 Bruchsal/Germany |
01 |
|||||||||
|
RF47DRE90L4BE2/MM15/MO |
||||||||||
|
01.300123457.0002.06 |
°C |
-20…40 |
||||||||
|
V |
380-500 |
Hz 50-60 |
A |
3.5 |
Iso.Kl. |
155(F) |
||||
|
kW |
1.5 |
Hz |
50 |
r/min |
1400/86 |
CT |
1:5 |
TEFC |
||
|
I |
16.22 |
Nm |
166 |
IP |
54 |
M.L. |
02 |
3~ |
||
|
IM |
M1 |
kg |
31 |
|||||||
|
V BR |
220..240 |
Nm |
13 |
kW |
1.5 |
Hz 50 |
||||
|
eff % |
85.2 |
|||||||||
|
1883410 |
||||||||||
|
CLP CC VGB220 0.65I |
Made in Germany |
9007199774918155
The logos at the top of the nameplate are only there if:
•the motor is manufactured accordingly,
•and contains at least one safety-rated component.
The FS logo on the nameplate is based on the combination of safety-related components that is installed.
3.3.2Type designation
The following table shows the type designation of the MOVIMOT® drive:
RF 47 DRE 90L4 BE/MM15/MO
Additional feature: inverter 1)
MOVIMOT® inverter
Optional design motor (brake)
Size, number of poles on motor
Motor series
DRS = DRS motor
DRE = DRE motor
DRP = DRP motor
Gear unit size
Gear unit series
1) The nameplate only displays options installed at the factory.
The available variants are listed in the «MOVIMOT® Gearmotors» catalog.
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
15 |
||
|
3 |
Unit Design |
Type designation of MOVIMOT® inverter |
3.4Type designation of MOVIMOT® inverter
3.4.1Nameplate
The following figure gives an example of a nameplate of a MOVIMOT® inverter:
|
Status: |
10 |
12 |
— A — — |
10 |
10 |
12 |
02 / 08 444 |
|||||||
|
Type : MM15D-503-00 |
||||||||||||||
|
P# : |
18215033 |
S# : 0886946 |
||||||||||||
|
Eingang / |
Input |
Ausgang / Output |
CH01 |
|||||||||||
|
U = |
3×380 . . . 500V AC |
U = |
3x0V . . . Uin |
|||||||||||
|
D-76646 Bruchsal |
I |
= |
3.5A AC |
I |
= |
4.0A AC |
N2936 |
|||||||
|
Made in Germany |
f |
= |
50 … 60Hz |
f |
= |
2 … 120Hz |
||||||||
|
MOVIMOT |
T = |
-30 . . . +40°C |
||||||||||||
|
Antriebsumrichter |
P-Motor |
1.5kW / 2.0HP |
||||||||||||
|
Drive Inverter |
Use 60/75°C copper wire only. Tighten terminals to 13.3 in.– ibs. (1.5 Nm). Suitable for use on a circuit capable of delivering not more than 200,000 rms symmetrical amperes, 500 volts maximum. Integral solid state short crcuit protection does not provide BCP. BCP must be provided in
accordance with the NEC and any additional local codes.
9007201212668299
3.4.2Type designation
The following table shows the type designation of the MOVIMOT® inverter:
MM 15 D – 503 – 00
Variant
00 = Standard
Connection type
3 = 3-phase
Supply voltage
50 = AC 380 – 500 V
23 = AC 200 – 240 V
Version D
Motor power
15 = 1.5 kW
Unit series
MM = MOVIMOT®
The available variants are listed in the «MOVIMOT® Gearmotors» catalog.
3.4.3Unit identification
The unit identification [1] on the top of the MOVIMOT® inverter provides information about the inverter type [2], inverter part number [3], unit power [4].
[2] 
























 [3]
[3] 

























 [4]
[4]
[1]
457916555
|
16 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
Unit Design
Type designation of the variant «mounted close to the motor»
3.5Type designation of the variant «mounted close to the motor»
3.5.1Nameplate
The following illustration shows an example of the MOVIMOT® inverter mounted close to the motor with corresponding nameplate:
MM15D-503-00/0/P21A/RO1A/APG4
457921547
3.5.2Type designation
The following table shows the type designation of a MOVIMOT® inverter mounted close to the motor:
MM15D-503-00/0/P21A/RO1A/APG4
Plug connector
For the connection to the motor
Connection box design
Adapter for mounting close to the motor
21 = Size 1
22 = Size 2
Connection type
MOVIMOT® inverter
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor

|
4 |
Mechanical Installation |
MOVIMOT® gearmotor installation |
4 Mechanical Installation
4.1MOVIMOT® gearmotor installation
4.1.1General information
•Observe the general safety notes.
•Strictly observe all instructions as to the technical data and the permissible conditions regarding the place of installation.
•Only use the provided attachment options when mounting the MOVIMOT® drive.
•Only use mounting and locking elements that fit into the existing bores, threads and countersinks.
4.1.2Installation requirements
Make sure that the following requirements are met before you start installing the unit:
•The data on the nameplate of the drive matches the voltage supply system.
•The drive is undamaged (no damage caused by transportation or storage)
•The ambient temperature corresponds to the specifications in chapter «Technical Data». Note that the temperature range of the gear unit may also be restricted (see gear unit operating instructions).
•The MOVIMOT® drive must not be installed under the following harmful ambient conditions:
–Potentially explosive atmospheres
–Oils
–Acids
–Gases
–Vapors
–Radiation
–etc.
•When the drive is installed in abrasive ambient conditions, protect the output end oil seals against wear.
|
Installation toler- |
The following tables shows the permitted tolerances of the shaft ends and flanges of the |
|
|
ances |
MOVIMOT® drive. |
|
|
Shaft end |
Flanges |
|
|
Diameter tolerance according to EN 50347 |
Centering shoulder tolerance in accordance |
|
|
• ISO j6 with Ø ≤ 26 mm |
with EN 50347 |
|
|
• ISO k6 with Ø ≤ 38 mm up to ≤ 48 mm |
• ISO j6 with Ø ≤ 250 mm |
|
|
• ISO m6 at Ø > 55 mm |
• ISO h6 with Ø > 300 mm |
|
|
• Center bore in accordance with DIN 332, |
||
|
shape DR.. |
|
18 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
|
Mechanical Installation |
4 |
|
MOVIMOT® gearmotor installation |
4.1.3Installing MOVIMOT®
NOTICE
Loss of warranted degree of protection if the MOVIMOT® inverter is installed incorrectly or not at all.
Damage to the MOVIMOT® inverter.
•If you remove the MOVIMOT® inverter from the connection box, you must protect it from moisture and dust.
Observe the following notes for mounting the MOVIMOT® drive:
•Only install the MOVIMOT® drive on a level, low-vibration, and torsionally rigid support structure.
•Observe the mounting position specified on the motor nameplate.
•Thoroughly remove any anti-corrosion agent from the shaft end. Use a commercially available solvent. Do not allow the solvent to penetrate the bearings and shaft seals
– this could damage the material.
•Align the motor carefully to avoid placing any unacceptable strain on the motor shafts. Observe the permitted overhung and axial loads specified in the «MOVIMOT® Gearmotors» catalog.
•Do not jolt or hammer the shaft end.
•Use an appropriate cover to prevent objects or fluids from entering motors in vertical mounting positions.
•Ensure sufficient clearance around the unit to allow for adequate cooling. Avoid the drawing in of warm outlet air of other units.
•Balance components that were subsequent mounted to the shaft with a half key (output shafts are balanced with a half key).
•Existing condensation drain holes are sealed with plastic plugs. Only open them, if necessary.
Open condensation drain holes are not permitted. If condensation drain holes are open, higher enclosures are no longer possible.
4.1.4Installation in damp locations or in the open
Observe the following notes for mounting the MOVIMOT® drive in damp areas or in the open:
•Use suitable cable glands for the cables. Use reducing adapters, if necessary.
•Coat the threads of the cable glands and filler plugs with sealing compound and tighten them properly. Then coat the cable glands again.
•Seal the cable entries properly.
•Clean the sealing faces of the MOVIMOT® inverter well before re-assembly.
•If the corrosion protection coating is damaged, restore the coating.
•Check whether the degree of protection specified on the nameplate is permitted in the ambient conditions on site.
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
19 |
||
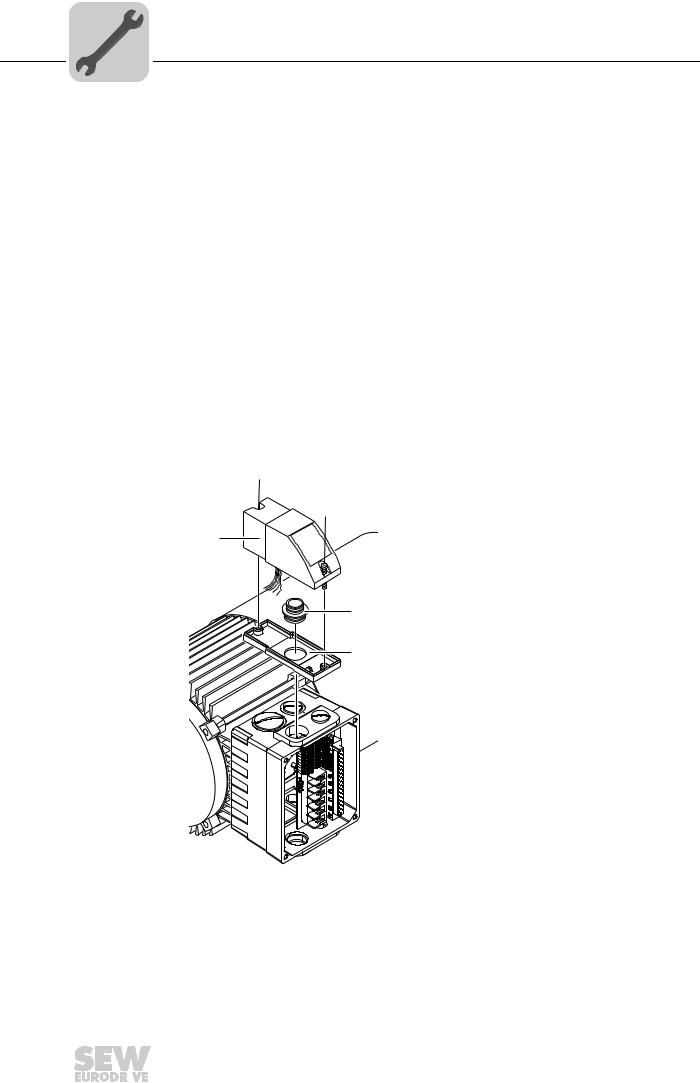
|
4 |
Mechanical Installation |
Installation of MOVIMOT® options |
4.2Installation of MOVIMOT® options
4.2.1MLU11A / MLU21A / MLG..A option
|
Scope of delivery |
• MLU11A / MLU21A / MLG..A upper part [2] |
•2 screws [1]
•Transit bolt [4]
•MLU11A / MLU21A / MLG..A lower part [5]
|
Installation |
1. Remove a screw plug on the MOVIMOT® connection box. |
2.Fix the lower part [5] on the MOVIMOT® connection box and fasten it with a transit bolt [4] (tightening torque 2.5 Nm / 22 lb.in).
3.Route the connection cable [3] through the transit bolt [4] into the inside of the MOVIMOT® connection box.
4.Fit the upper part [2] onto the lower part [5] and fasten it with two screws [1] (tightening torque 0.9 – 1.1 Nm / 8 – 10 lb.in).
Mount the option in the following position only:
[1]
[1]
[2]
[3] 
458285835
For more information about connecting the MLU11A/MLU21A option, refer to sec. «Connection of option MLU11A/MLU21A» (page 42).
For more information about connecting the MLG..A option, refer to sec. «Connection of option MLG..A» (page 43).
|
20 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
![]()
Mechanical Installation
Installation of MOVIMOT® options
4.2.2MLU13A option
Option MLU13A is installed in the modular connection box at the factory. If you have any questions about retrofitting the option, please contact the SEW-EURODRIVE service.
INFORMATION
Only install this option in combination with the modular connection box of MOVIMOT® MM03D-503-00 – MM40D-503-00.
The following figure depicts an installation example. The installation depends on the used connection box and on other installed options, if there are any.
1113300875
For more information about connecting the MLU13A option, refer to chapter «Connection of option MLU13A» (page 42).
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor
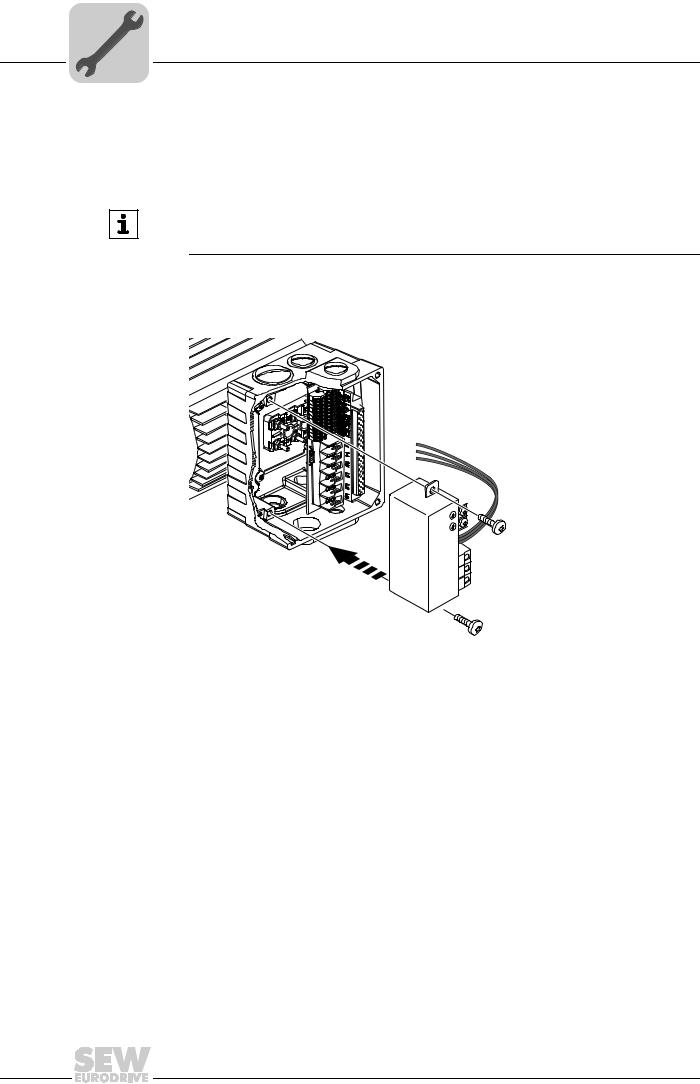
Mechanical Installation
Installation of MOVIMOT® options
4.2.3MNF21A option
Option MNF21A is installed in the modular connection box at the factory. If you have any questions about retrofitting the option, please contact the SEW-EURODRIVE service.
INFORMATION
Only install this option in combination with the modular connection box of MOVIMOT® MM03D-503-00 – MM15D-503-00.
The following figure depicts an installation example. The installation depends on the used connection box and on other installed options, if there are any.
2753184651
For more information about connecting the MNF21A option, refer to chapter «Connecting the MNF21A option» (page 44).
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor

Mechanical Installation
Installation of MOVIMOT® options
4.2.4URM/BEM/BES options
The URM, BEM and BES options are installed in the connection box at the factory. If you have any questions about retrofitting the options URM, BEM, or BES, please contact the SEW-EURODRIVE service.
The following figure depicts an installation example. The installation depends on the used connection box and on other installed options, if there are any.
458307467
For more information about connecting the URM option, refer to chapter «Connection of option URM» (page 45).
For more information about connecting the BEM option, refer to chapter «Connection of option BEM» (page 46).
For more information about connecting the BES option, refer to chapter «Connection of option BES» (page 47).
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor
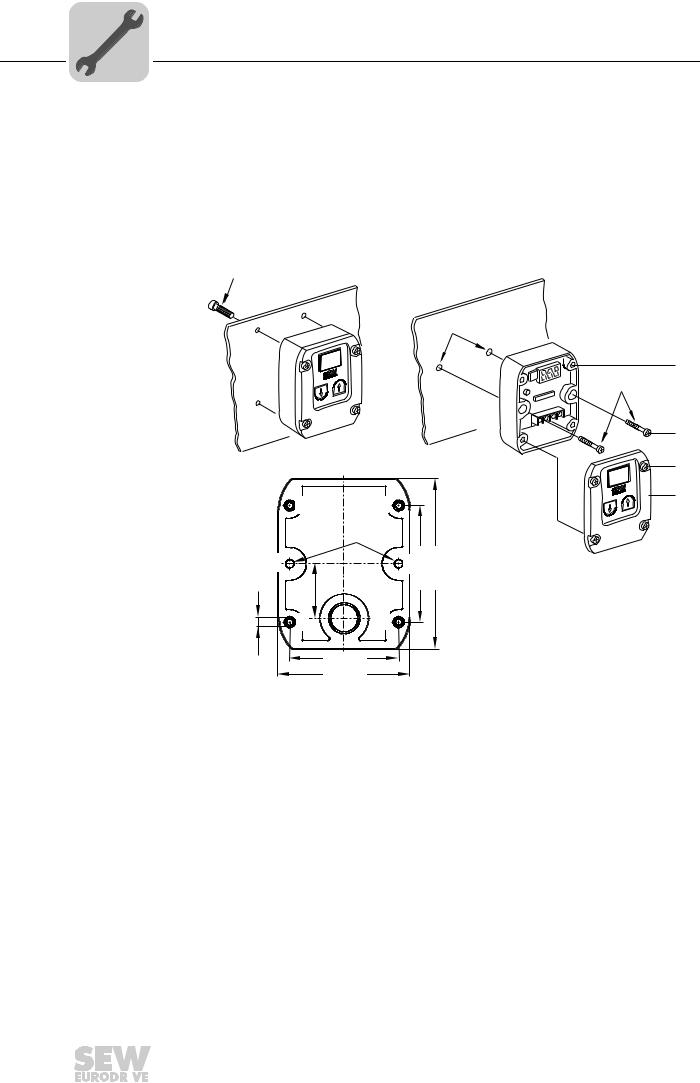
|
4 |
Mechanical Installation |
|
Installation of MOVIMOT® options |
4.2.5Installation MBG11A
There are two ways to mount option MBG11A to a wall:
A:Mounting from the rear using 4 tapped holes.
(Tightening torque of retaining screw [1]: 1.6 – 2.0 Nm / 14 – 18 lb.in)
B:Mounting from the front using 2 retaining holes
(Tightening torque of retaining screw [3]: 1.6 – 2.0 Nm / 14 – 18 lb.in)
|
A |
A |
|
|
Ø 4,3 mm |
||
|
B |
Bmm |
<![if ! IE]>
<![endif]>mm |
| <![if ! IE]>
<![endif]>mm |
<![if ! IE]>
<![endif]>60 |
<![if ! IE]>
<![endif]>88 |
| <![if ! IE]>
<![endif]>28 |
||
|
A |
A |
|
| <![if ! IE]>
<![endif]>M4 |
56 mm |
|
|
68 mm |
a = Wall thickness
Screws are not included in the scope of delivery.
[2]
M4 x 25
[3]
[4]
[5]
322404747
Fit the upper part [5] onto the lower part [2] and fasten it with two screws [4] (tightening torque 0.3 Nm / 2.6 lb.in).
For more information about connecting the MBG11A option, refer to sec. «Connection of option MBG11A» (page 48).
|
24 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
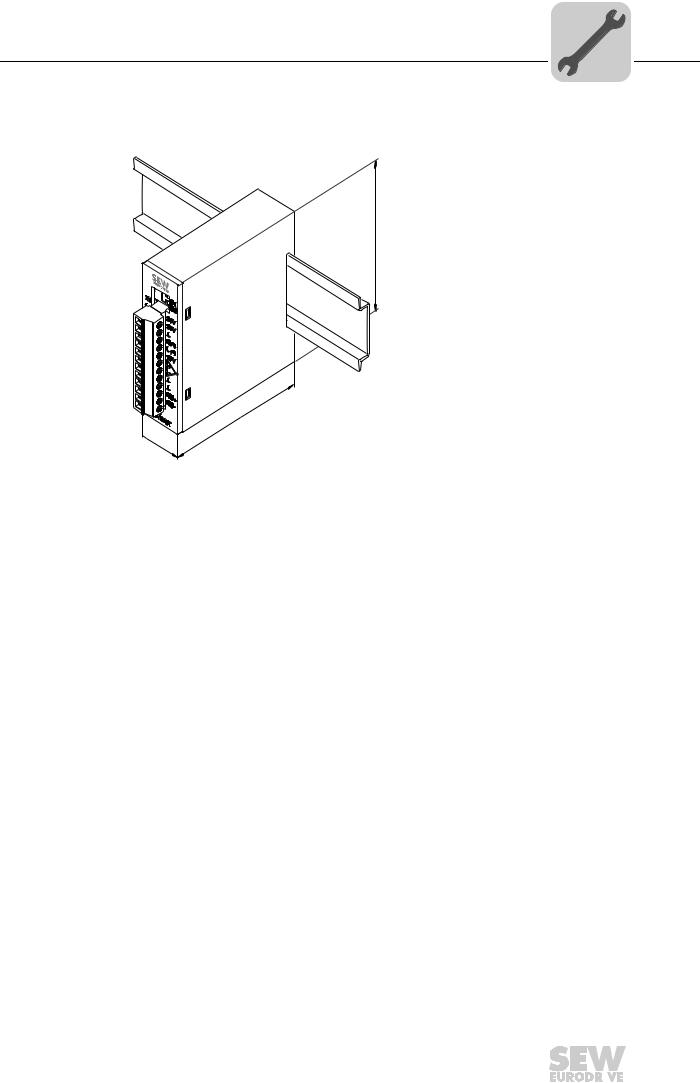
|
Mechanical Installation |
4 |
|
Installation of MOVIMOT® options |
4.2.6MWA21A option
Install option MWA21A in the control cabinet on a mounting rail according to EN 50022:
<![if ! IE]>
<![endif]>75
74
 22,5
22,5
322411915
For more information about connecting the MWA21A option, refer to sec. «Connection of option MWA21A» (page 49).
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
25 |
||
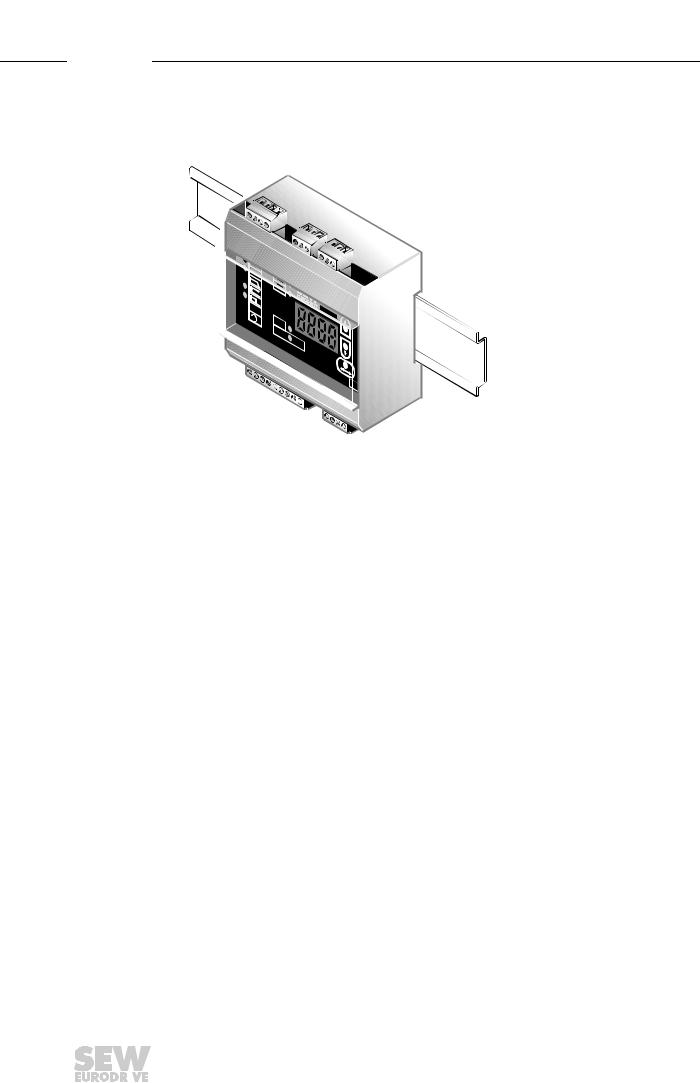
|
4 |
Mechanical Installation |
|
Installation of MOVIMOT® options |
4.2.7MWF11A option
Install option MWF11A in the control cabinet on a mounting rail according to EN 50022:
100
<![if ! IE]>
<![endif]>75
52
3180221579
For more information about connecting the MWF11A option, refer to chapter «Connection of option MWF11A» (page 50).
|
26 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
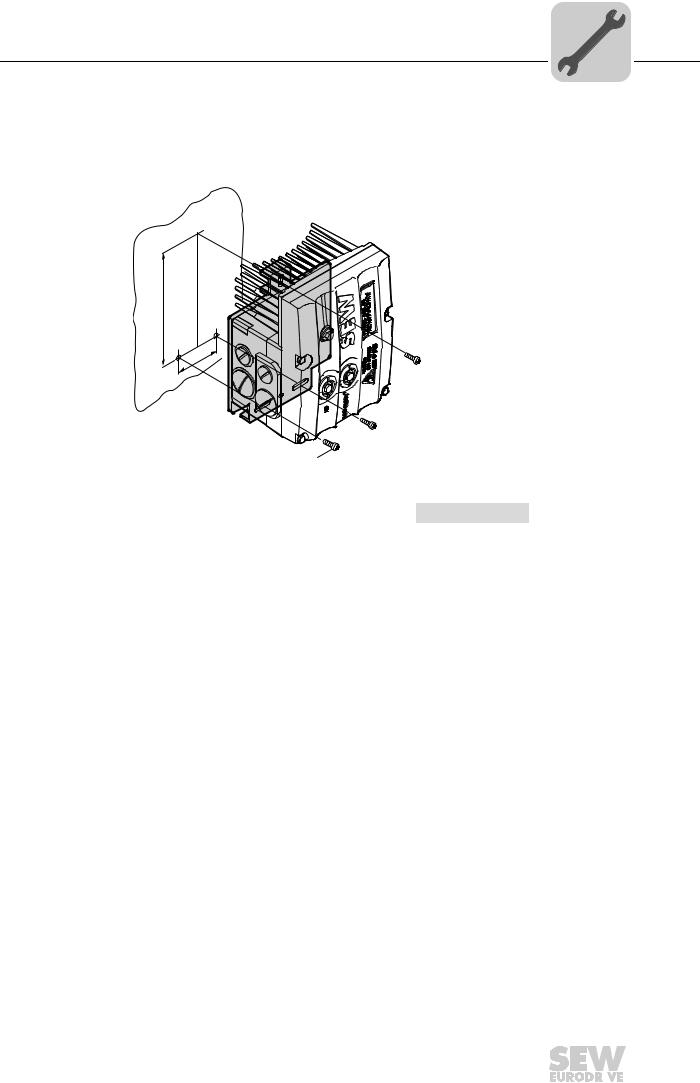
|
Mechanical Installation |
4 |
Installation of the MOVIMOT® inverter close to the motor |
4.3Installation of the MOVIMOT® inverter close to the motor
The following figure shows the mounting dimensions for installing the MOVIMOT® inverter close to the motor:
 M6
M6
<![if ! IE]>
<![endif]>A
B
|
M6 |
||||
|
458277771 |
||||
|
Size |
Type |
A |
B |
|
|
1 |
MM03D503-00 – MM15D-503-00 |
140 mm |
65 mm |
|
|
MM03D233-00 – MM07D-233-00 |
||||
|
2 / 2L |
MM22D503-00 – MM40D-503-00 |
170 mm |
65 mm |
|
|
MM11D233-00 – MM22D-233-00 |
||||
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
27 |
||
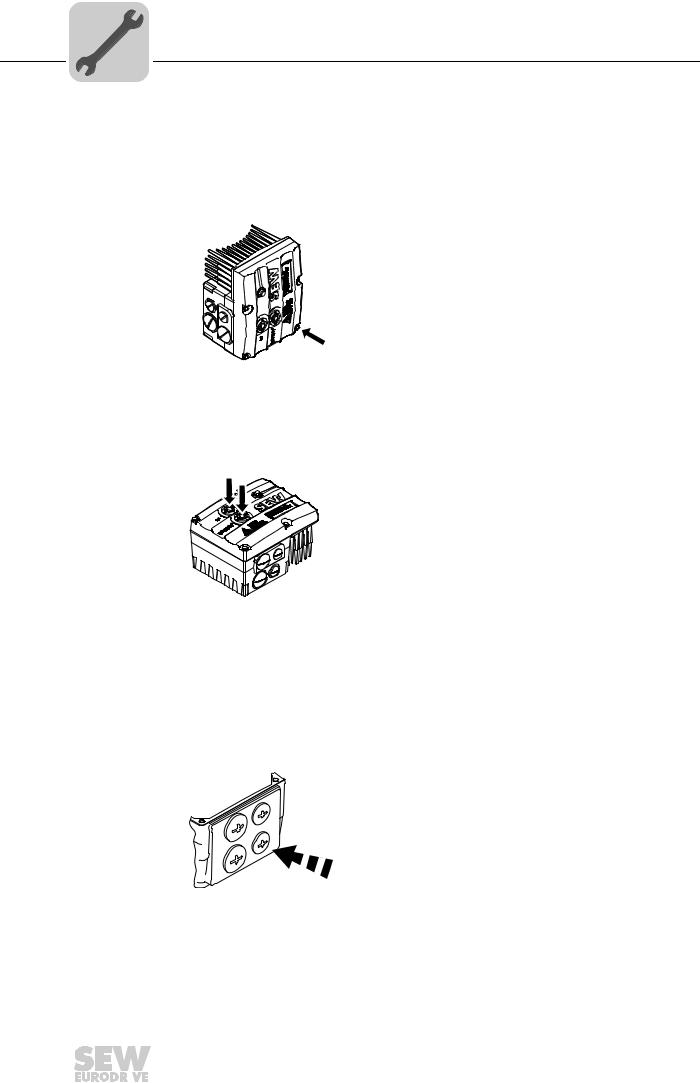
|
4 |
Mechanical Installation |
|
Tightening torques |
||
4.4Tightening torques
4.4.1MOVIMOT® inverter
Tighten the screws on the MOVIMOT® inverter using 3.0 Nm (27 lb.in) working diagonally across.
458577931
4.4.2Screw plugs
Tighten screw plugs of potentiometer f1 and connection X50 using 2.5 Nm (22 lb.in).
458570379
4.4.3Cable glands
It is essential to observe the manufacturer’s specifications for the cable glands.
4.4.4Blanking plug cable entries
Tighten blanking plug screws with 2.5 Nm (22 lb.in).
322777611
|
28 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||

|
Mechanical Installation |
4 |
|
|
Tightening torques |
||
4.4.5Modular connection box
For fastening the connection box on the mounting plate, tighten screws using 3.3 Nm (29 lb.in).
322786187
4.4.6Tightening torques for terminals
Use the following tightening torques for terminals during installation:
458605067
[1]0.8 – 1.5 Nm (7 – 13 lb.in)
[2]1.2 – 1.6 Nm (11 – 14 lb.in)
[3]2.0 – 2.4 Nm (18 – 21 lb.in)
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
29 |
||

|
5 |
Electrical Installation |
|
Installation instructions |
||
5 Electrical Installation
5.1Installation instructions
5.1.1Supply system connection
•The rated voltage and frequency of the MOVIMOT® inverter must correspond to the data for the power supply system.
•Install line fuses at the beginning of the power supply cable behind the supply bus junction, see F11/F12/F13 in chapter «Connection of MOVIMOT® drive».
Use only D, D0 or NH fuses, or circuit breakers for F11/F12/F13. Select the fuse size according to the cable cross section.
•SEW-EURODRIVE recommends using earth-leakage monitors with pulse code measuring in voltage supply systems with a non-grounded star point (IT systems). The use of such devices prevents the earth-leakage monitor mis-tripping due to the earth capacitance of the inverter.
•Cable cross section: according to input current Imains for rated power (see chapter «Technical Data»).
5.1.2Permitted cable cross section of MOVIMOT® terminals
Power terminals Observe the permitted cable cross sections for installation:
|
Power terminals |
||
|
Cable cross section |
1.0 mm2 — 4.0 mm2 (2 x 4.0 mm2) |
|
|
AWG17 – AWG12 (2 x AWG12) |
||
|
Conductor end sleeves |
• |
For single assignment: |
|
Only connect single-wire conductors or flexible conduc- |
||
|
tors with conductor end sleeve (DIN 46228, material E- |
||
|
• |
CU) with or without insulating shrouds |
|
|
For double assignment: |
||
|
Only connect flexible conductors with conductor end |
||
|
sleeve (DIN 46228-1, material E-CU) without insulat- |
||
|
ing shrouds |
||
|
• Permitted length of the conductor end sleeve: At least 8 |
||
|
mm |
Control terminals Observe the permitted cable cross sections for installation:
|
Control terminals |
||
|
Cable cross section |
||
|
• Single-wire conductor |
0.5 mm2 – 1.0 mm2 |
|
|
(bare wire) |
||
|
• Flexible conductor |
AWG20 – AWG17 |
|
|
(bare litz wire) |
||
|
• Conductor with end sleeve |
||
|
Without insulating shrouds |
||
|
• Conductor with end sleeve |
0.5 mm2 – 0.75 mm2 |
|
|
With insulating shrouds |
AWG20 – AWG19 |
|
|
Conductor end sleeves |
• Only connect single-wire conductors or flexible conduc- |
|
|
tors with or without conductor end sleeve (DIN 46228, |
||
|
material E-CU) |
||
|
• Permitted length of the conductor end sleeve: At least 8 |
||
|
mm |
|
30 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
![]()
|
Electrical Installation |
5 |
|
|
Installation instructions |
||
5.1.3Using the control terminals X5 – X6
Note the following information for actuating the control terminal clamps:
|
Connecting the conductor |
Connecting the conductor |
|
Without pushing the actuation button |
After pressing the activation button |
1.
 2.
2.
|
9007199919965835 |
9007200623153931 |
|
The following conductors can be installed |
When connecting the following conduc- |
|
directly (without tool) up to two cross-sec- |
tors, you must press the actuation button |
|
tion sizes below the nominal cross sec- |
on top to open the clamping spring: |
|
tion: |
• Untreated, flexible conductors |
|
• Single-wire conductors |
• Conductors with small cross sections |
|
• Flexible conductors with end sleeves |
that cannot be plugged in directly |
|
Removing the conductor |
|
|
After pressing the activation button |
|
1.
2.
9007199735787147
Before removing the conductor, first press the actuation button on top.
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
31 |
||
|
5 |
Electrical Installation |
|
|
Installation instructions |
||
5.1.4Earth-leakage circuit breaker
WARNING
Electric shock due to incorrect earth-leakage circuit breaker type. Severe or fatal injuries.
MOVIMOT® can cause direct current in the protective earth. In cases where an earthleakage circuit breaker is used for protection against direct or indirect contact, only install a type B earth-leakage circuit breaker on the power supply end of the MOVIMOT® inverter.
•Do not use a conventional earth leakage circuit-breaker as a protective device. Uni-
versal current-sensitive earth leakage circuit-breakers (tripping current 300 mA) are permitted as a protective device. During normal operation of MOVIMOT® inverter, earth-leakage currents of > 3.5 mA can occur.
•SEW-EURODRIVE recommends that you do not use earth-leakage circuit breakers. However, if an earth-leakage circuit breaker is stipulated for direct or indirect protection against contact, observe the note above in accordance with EN 61800-5-1.
5.1.5Line contactor
NOTICE
Damage to the MOVIMOT® inverter due to jogging of the K11 line contactor.
Damage to the MOVIMOT® inverter.
•Do not use the K11 input contactor (see wiring diagram (page 36)) for jog mode, but only for switching the inverter on and off. For jog mode, use the the commands «CW / Stop» or «CCW / Stop».
•Observe a minimum switch-off time of 2 s for the line contactor K11.
•Only use a contactor of utilization category AC3 (EN 60947-4-1) as a line contactor.
|
32 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
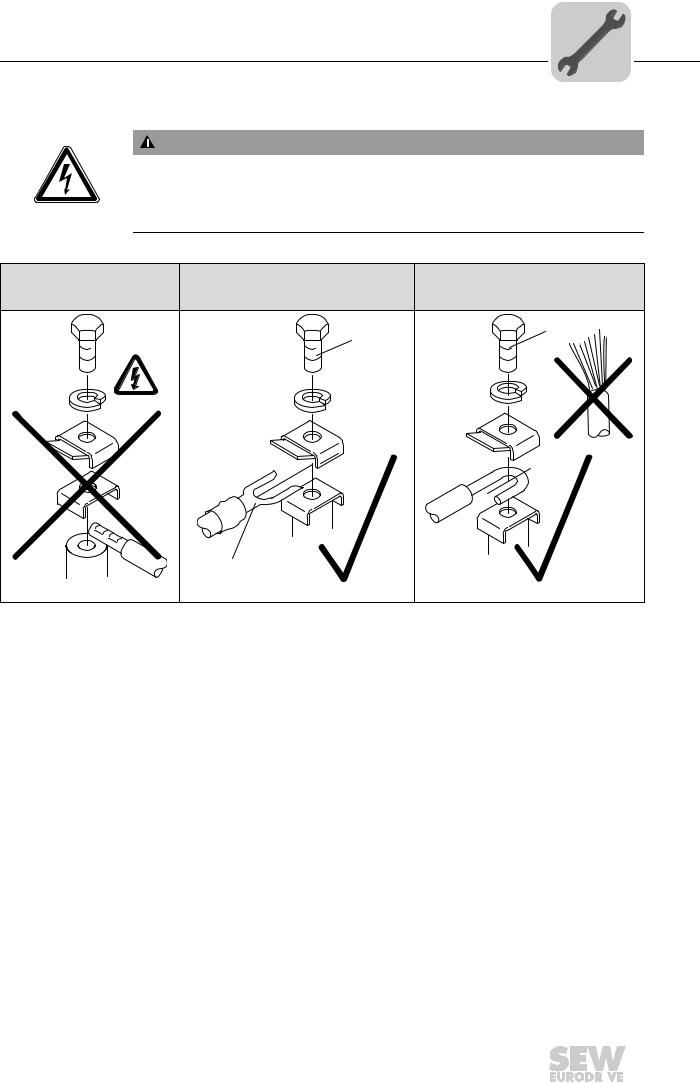
|
Electrical Installation |
5 |
|
|
Installation instructions |
||
5.1.6Notes on PE connection
WARNING
Electric shock due to incorrect connection of PE. Severe or fatal injuries.
• The permitted tightening torque for the screw is 2.0 – 2.4 Nm (18 – 21 lb.in).
• Observe the following notes regarding PE connection.
|
Prohibited assembly |
Recommendation: |
Assembly with solid connecting wire |
|
Assembly with forked cable lug |
Permitted for cross sections up to |
|
|
Permitted for all cross sections |
max. 2.5 mm2 |
|
|
M5 |
M5 |
|
 2.5 mm²
2.5 mm²
[1]
|
323042443 |
323034251 |
323038347 |
[1]Forked cable lug suitable for M5 PE screws
Earth-leakage currents ≥ 3.5 mA can occur during normal operation. To meet the requirements of EN 61800-5-1, observe the following notes:
•The protective earth (PE) connection must meet the requirements for plants with high earth-leakage currents.
•This usually means
–installing a PE connection cable with a minimum cross section of 10 mm2
–or installing a second PE connection cable in parallel with the original PE connection.
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
33 |
||

|
5 |
Electrical Installation |
|
|
Installation instructions |
||
5.1.7EMC-compliant installation
INFORMATION
This drive system is not designed for operation on a public low voltage supply system that supplies residential areas.
This is a product with restricted availability in accordance with IEC 61800-3. It may cause EMC interference. In this case, it is recommended for the operator to take suitable measures.
For detailed information on EMC compliant installation, refer to the publication «Electromagnetic Compatibility in Drive Engineering» from SEW-EURODRIVE.
With respect to the EMC regulation, frequency inverters cannot be operated as standalone units. Regarding EMC, they can only be evaluated when they are integrated in a drive system. Conformity is declared for a described, CE-typical drive system. These operating instructions contain further information.
5.1.8Installation above 1000 m asl
MOVIMOT® drives with line voltages of 200 – 240 V or 380 – 500 V, can be also used in altitudes of 1000 – 4000 m above sea level1). Observe the following conditions:
•The nominal continuous power is reduced due to the reduced cooling above 1000 m (see chapter «Technical Data»).
•Above 2000 m asl, the air and creeping distances are only sufficient for overvoltage class 2. If the installation calls for overvoltage class 3, you will have to install additional external overvoltage protection to limit overvoltage peaks to 2.5 kV phase-to- phase and phase-to-ground.
•If safe electrical disconnection is required, it must be implemented outside the unit for altitudes of 2000 m above sea level and higher (safe electrical disconnection in accordance with EN 61800-5-1).
•In installation altitudes between 2000 m to 4000 msl, the permitted nominal power supply voltages are reduced as follows:
–By 6 V per 100 m for MM..D-503-00
–By 3 V per 100 m for MM..D-233-00
5.1.9Connecting 24 V supply
•Power the MOVIMOT® inverter either via an external 24 V supply or the MLU..A or MLG..A options.
5.1.10Binary control
•Connect the required control leads.
•Use shielded cables as control cables and route them separately from supply system cables.
|
1) The maximum altitude is limited by creeping distances and flameproof components, such as capacitors. |
|
|
34 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
Electrical Installation
Installation instructions
5.1.11 Control via RS-485 interface
The MOVIMOT® drive is controlled via the RS-485 interface by one of the following controllers:
•MOVIFIT® MC
•Fieldbus interfaces MF.. or MQ..
•PLC bus master
•MLG..A option
•MBG11A option
•MWA21A option
•MWF11A option
INFORMATION
•Connect only one bus master to the MOVIMOT® drive.
•Use shielded twisted-pair cables as control cables.
•Route the control cables separately from the power supply cables.
5.1.12Protection devices
•MOVIMOT® drives are equipped with integrated protection devices against overload. External overload devices are not necessary.
|
5.1.13 |
|
|
Field wiring power |
Note the following points for UL-compliant installation: |
|
terminals |
• Only use copper conductors with a thermal rating of 60/75 °C. |
|
• The permitted tightening torque of the power terminals is 1.5 Nm (13 Ib.in). |
|
|
Short circuit cur- |
Suitable for use on a circuit capable of delivering not more than 200,000 rms |
|
rent rating |
symmetrical amperes. |
|
The max. voltage is limited to 500 V. |
|
|
Branch circuit pro- |
Integral solid state short circuit protection does not provide branch circuit protection. |
|
tection |
Branch circuit protection must be provided in accordance with the National Electrical |
|
Code and any applicable local codes. |
|
|
The max. fuse rating is 25 A / 600 V. |
|
|
Motor overload |
MOVIMOT® MM..D is equipped with motor overload protection with a trip current ad- |
|
protection |
justed to 140% of the rated motor current. |
|
Ambient tempera- |
MOVIMOT® MM..D is suitable for an ambient temperature of 40 °C, max. 60 °C with de- |
|
ture |
rated output current. To determine the output current rating at higher than 40 °C, the out- |
|
put current should be derated 3.0 % per °C between 40 °C and 60 °C. |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor
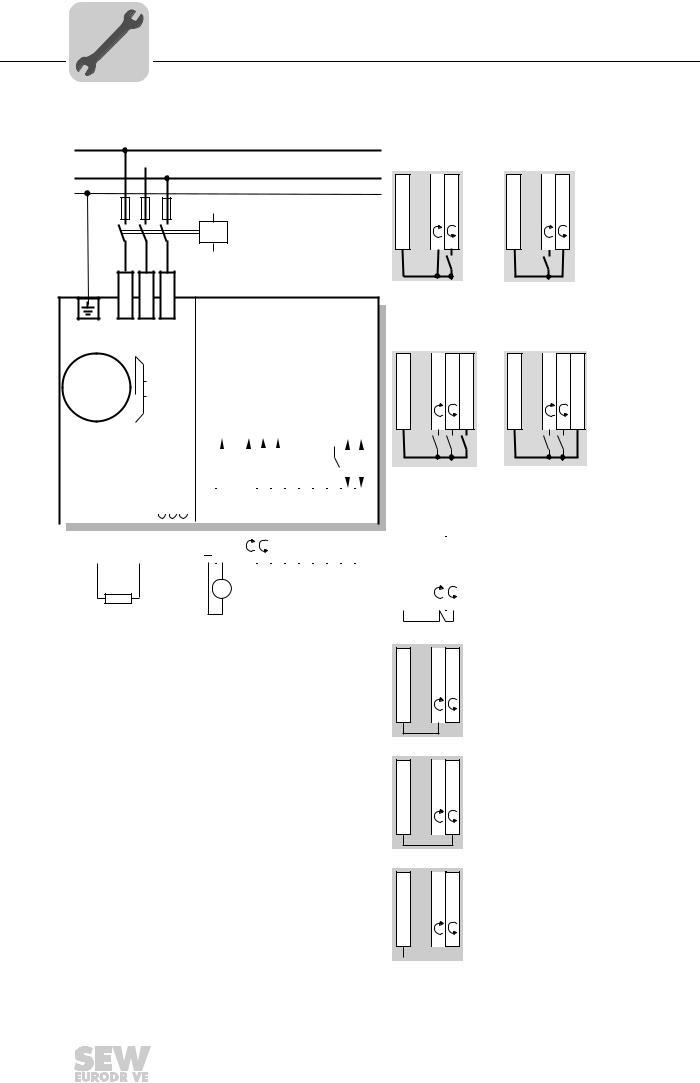
|
5 |
Electrical Installation |
Connection of the MOVIMOT® drive |
5.2Connection of the MOVIMOT® drive
L1
L2 
L3
PE
F11/F12/F13
K11
Functions of the CW/stop and CCW/stop terminals in binary control mode:
| <![if ! IE]>
<![endif]>X6:1,2,3 |
<![if ! IE]>
<![endif]>X6:11,12 X6:9,10 |
<![if ! IE]>
<![endif]>X6:1,2,3 |
<![if ! IE]>
<![endif]>X6:11,12 X6:9,10 |
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R L |
<![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R L |
| <![if ! IE]>
<![endif]>X1:L1 |
<![if ! IE]>
<![endif]>X1:L2 |
<![if ! IE]>
<![endif]>X1:L3 |
|
MOVIMOT® |
|
M |
BE/BR |
||||||||||||||||||||||||||||||||||||||||
|
3~ |
|||||||||||||||||||||||||||||||||||||||||
|
485 |
|||||||||||||||||||||||||||||||||||||||||
|
— |
|||||||||||||||||||||||||||||||||||||||||
|
[1] |
[2] [3] [4] |
[5] |
[6] |
RS |
|||||||||||||||||||||||||||||||||||||
| <![if ! IE]>
<![endif]>WH |
<![if ! IE]>
<![endif]>K1 |
||||||||||||||||||||||||||||||||||||||||
| <![if ! IE]>
<![endif]>RD |
<![if ! IE]>
<![endif]>BU |
||||||||||||||||||||||||||||||||||||||||
| <![if ! IE]>
<![endif]>4,5,6 |
<![if ! IE]>
<![endif]>1,2,3 |
<![if ! IE]>
<![endif]>11,12 |
<![if ! IE]>
<![endif]>9,10 |
<![if ! IE]>
<![endif]>7,8 |
<![if ! IE]>
<![endif]>21,22 |
<![if ! IE]>
<![endif]>23,24 |
<![if ! IE]>
<![endif]>25,26 |
<![if ! IE]>
<![endif]>27,28 |
<![if ! IE]>
<![endif]>29,30 |
<![if ! IE]>
<![endif]>31,32 |
|||||||||||||||||||||||||||||||
|
13 |
14 |
15 |
|||||||||||||||||||||||||||||||||||||||
|
X1: |
X1: |
X1: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>24V X6: |
<![if ! IE]>
<![endif]>R X6: |
<![if ! IE]>
<![endif]>L X6: |
<![if ! IE]>
<![endif]>f1/f2 X6: |
<![if ! IE]>
<![endif]>HT1 X5: |
<![if ! IE]>
<![endif]>HT2 X5: |
<![if ! IE]>
<![endif]>K1a X5: |
<![if ! IE]>
<![endif]>K1b X5: |
<![if ! IE]>
<![endif]>RSX5: |
<![if ! IE]>
<![endif]>RS+ X5: |
||||||||||||||||||||||||||||
| <![if ! IE]>
<![endif]>X10:1 X10:2 X10:3 |
|||||||||||||||||||||||||||||||||||||||||
[8]+
=DC 24 V
—
[7]
18014399135542795
|
Direction of rotation |
Direction of rotation |
||||
|
CW active |
CCW active |
||||
|
Functions of terminals f1/f2: |
|||||
| <![if ! IE]>
<![endif]>X6:1,2,3 |
<![if ! IE]>
<![endif]>X6:11,12 X6:9,10 |
<![if ! IE]>
<![endif]>X6: 7,8 |
<![if ! IE]>
<![endif]>X6:1,2,3 |
<![if ! IE]>
<![endif]>X6:11,12 X6:9,10 |
<![if ! IE]>
<![endif]>X6: 7,8 |
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R L |
<![if ! IE]>
<![endif]>f1/f2 |
<![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R L |
<![if ! IE]>
<![endif]>f1/f2 |
|
Setpoint f1 active |
Setpoint f2 active |
Functions of the CW/stop and CCW/stop terminals with control via RS-485 interface/fieldbus:
| <![if ! IE]>
<![endif]>11,12 |
|||||
| <![if ! IE]>
<![endif]>1,2,3 |
<![if ! IE]>
<![endif]>9,10 |
Both directions of rotation |
|||
| <![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
|||
|
are enabled |
|||||
| <![if ! IE]>
<![endif]>24V |
|||||
| <![if ! IE]>
<![endif]>R |
<![if ! IE]>
<![endif]>L |
||||
<![if ! IE]>
<![endif]>24V X6: 1,2,3
<![if ! IE]>
<![endif]>R X6: 11,12 L X6: 9,10
Only CW direction is enabled
Pre-selected setpoints for CCW rotation result in standstill of drive
[1] DC 24 V supply
(external or via option MLU..A / MLG..A)
[2]CW/stop
[3]CCW/stop
[4]Setpoint changeover f1/f2
[5]HT1 / HT2: Intermediate terminal for specific wiring diagrams
[6]Ready signal
(contact closed = ready for operation) [7] BW.. braking resistor
(only for MOVIMOT® drives without mechanical brake) [8] Plug connector for connecting the options BEM + BES
| <![if ! IE]>
<![endif]>X6:1,2,3 |
<![if ! IE]>
<![endif]>X6:11,12 |
<![if ! IE]>
<![endif]>X6:9,10 |
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R L |
|
| <![if ! IE]>
<![endif]>X6:1,2,3 |
<![if ! IE]>
<![endif]>X6:11,12 |
<![if ! IE]>
<![endif]>X6:9,10 |
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R L |
Only CCW operation is enabled
Setpoint specifications for CW operation
cause standstill of the drive
Drive is inhibited or is being brought to a standstill
|
36 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
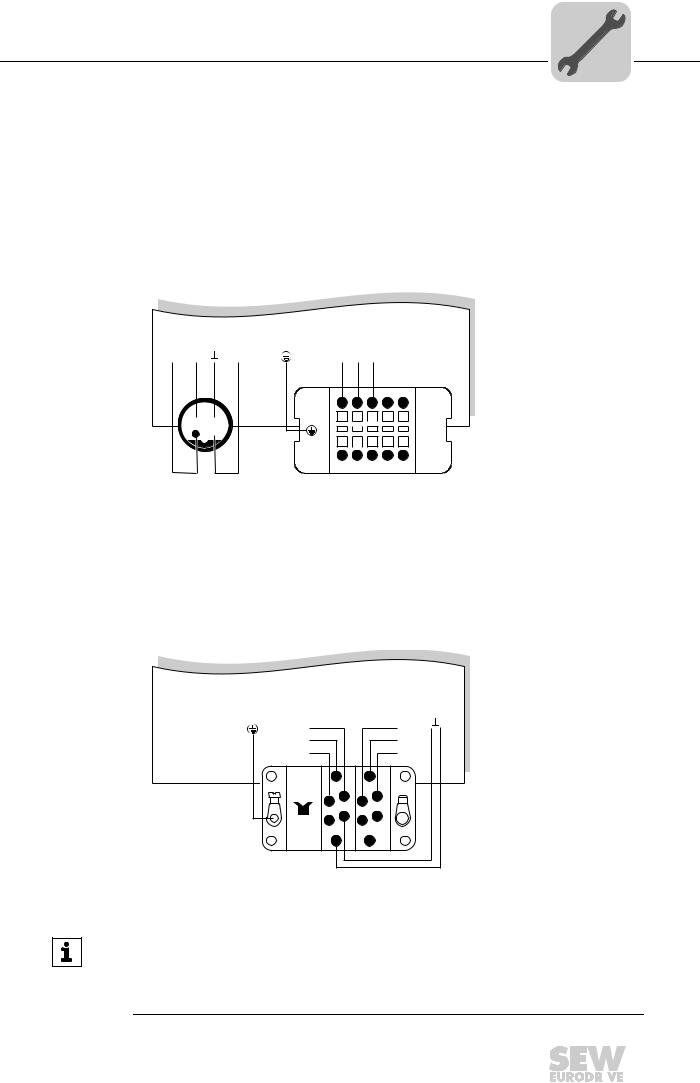
|
Electrical Installation |
5 |
MOVIMOT® plug connectors |
5.3MOVIMOT® plug connectors
5.3.1AVT1, ASA3 plug connectors
The following figure shows the assignment of optional AVT1 and ASA3 plug connectors.
Available versions:
•MM../ASA3
•MM../AVT1
•MM../ASA3/AVT1
MOVIMOT®
1 2 3 4 5
4
 3
3
1
 2
2
6 7 8 9 10
323830155
5.3.2AMA6 plug connectors
The following illustration shows the assignment of the optional AMA6 plug connector.
Possible design:
•MM../AMA6
|
MOVIMOT® |
|||
|
RS- |
L3 |
||
|
RS+ |
L1 |
||
|
24 V |
L2 |
||
|
C |
1 |
1 |
A |
|
3 |
2 |
3 |
2 |
|
5 |
4 |
5 |
4 |
|
6 |
6 |
||
|
AMA6 |
323879563
INFORMATION
For designs with plug connectors, both directions of rotation are enabled as standard.
If only one direction of rotation is required, please observe chapter «Connection of the
MOVIMOT® drive, functions of the terminals CW/stop, CCW/stop for connection via
RS-485 interface».
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
37 |
||
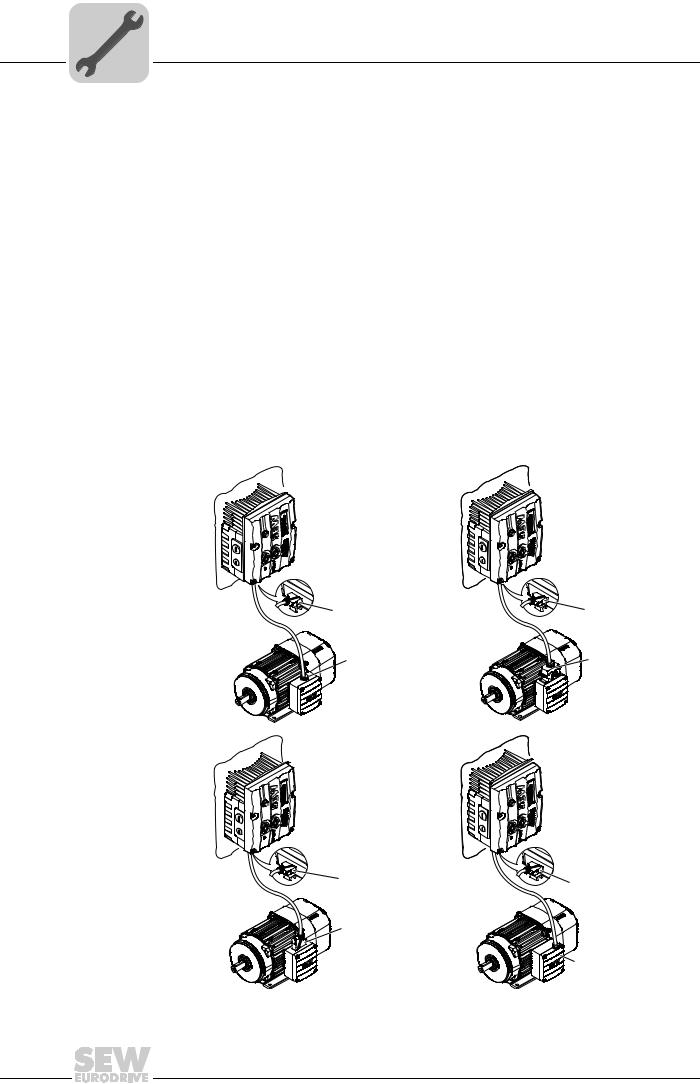
|
5 |
Electrical Installation |
|
Connection between MOVIMOT® and motor when mounted close to the |
5.4Connection between MOVIMOT® and motor when mounted close to the motor
If the MOVIMOT® inverter is mounted close to the motor, the connection to the motor is realized with a pre-fabricated hybrid cable.
Use only hybrid cables from SEW-EURODRIVE to connect the MOVIMOT® inverter with the motor.
The following designs are possible on the MOVIMOT® side:
•A: MM../P2.A/RO.A/APG4
•B: MM../P2.A/RE.A/ALA4
The APG4 type results in the following connection options to the motor, depending on the hybrid cable used:
|
Design |
A1 |
A2 |
A3 |
A4 |
|
|
MOVIMOT® |
APG4 |
APG4 |
APG4 |
APG4 |
|
|
Motor |
Cable gland/ |
ASB4 |
APG4 |
ISU4 |
|
|
terminals |
|||||
|
Hybrid cable |
0 186 742 3 |
0 593 076 6 |
0 186 741 5 |
0 816 325 1 |
for DR.63 |
|
0 816 326 X for DR.71–DR.132 |
|||||
|
0 593 278 5 |
for DR.63 |
||||
|
0 593 755 8 |
for DR.71–DR.132 |
|
A3 |
A4 |
||
|
APG4 |
APG4 |
||
|
APG4 |
|||
|
ISU4 |
|||
|
[1] Connection via terminals |
458666635 |
||
|
38 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
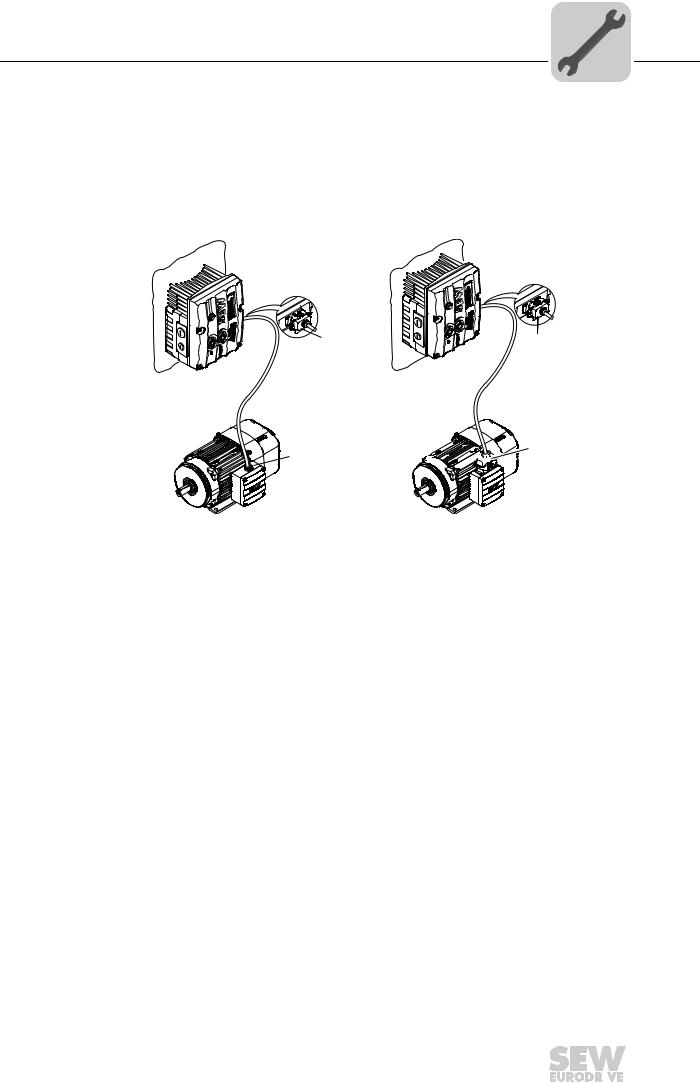
|
Electrical Installation |
5 |
|
Connection between MOVIMOT® and motor when mounted close to the |
The APG4 design results in the following connection options to the motor, dependent upon the hybrid cable used:
|
Design |
B1 |
B2 |
|
MOVIMOT® |
ALA4 |
ALA4 |
|
Motor |
Cable gland/terminals |
ASB4 |
|
Hybrid cable |
0 817 948 4 |
0 816 208 5 |









 ASB4 [1]
ASB4 [1] 























458688139
[1] Connection via terminals
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
39 |
||

|
5 |
Electrical Installation |
|
Connection between MOVIMOT® and motor when mounted close to the |
5.4.1Overview of connections between MOVIMOT® and motor when mounted close to the motor
|
MOVIMOT® inverter |
Design |
Hybrid cable |
Drive |
||||||||||||||||||||||||||||||||||||||||||||
|
MM../P2.A/RO.A/APG4 |
A1 |
Part number DR71 – DR100: 0 186 742 3 |
AC motors with cable gland |
||||||||||||||||||||||||||||||||||||||||||||
|
Part number DR112 – DR132: 1 811 662 0 |
|||||||||||||||||||||||||||||||||||||||||||||||
|
A2 |
Part number: 0 593 076 6 |
AC motors with ASB4 plug |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
APG4 |
connector |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
A3 |
Part number: 0 186 741 5 |
AC motors with APG4 plug |
||||||||||||||||||||||||||||||||||||||||
|
connector |
||||||||||||||||||||||||||||||||||||||||||
|
A4 |
Part number: 0 593 278 5 |
( ) |
AC motors with plug connec- |
|
Part number: 0 816 325 1 |
( ) |
tor ISU4 |
|
|
Size DR.63 |
<![endif]>593 278 5
|
A4 |
Part number: 0 593 755 |
8 ( ) |
AC motors with plug connec- |
|
Part number: 0 816 326 |
X ( ) |
tor ISU4 |
|
|
Size DR.71-DR.132 |
<![endif]>593 278 5
|
MM../P2.A/RE.A/ALA4 |
B1 |
Part number: 0 817 948 4 |
AC motors with cable gland |
|||||||||||||||||||||||||||||||||||||||||
|
B2 |
Part number: 0 816 208 5 |
AC motors with ASB4 plug |
|
connector |
ALA4
|
40 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
![]()
|
Electrical Installation |
5 |
|
Connection between MOVIMOT® and motor when mounted close to the |
5.4.2Hybrid cable connection
The following tables shows the conductor assignment in hybrid cables with part no. 0 186 742 3 and 0 817 948 4 and the corresponding motor terminals of the DR motor:
|
DR motor terminal |
Wire color/hybrid cable designation |
|
U1 |
Black/U1 |
|
V1 |
Black/V1 |
|
W1 |
Black/W1 |
|
4a |
Red/13 |
|
3a |
White/14 |
|
5a |
Blue/15 |
|
1b |
Black/1 |
|
2b |
Black/2 |
|
PE connection |
Green/yellow + shield end (internal shield) |
The following figure shows the connection of the hybrid cable to the terminal box of the
DR motor.
|
PE |
|||||||
|
U1 |
V1 |
W1 |
BK/W1 |
||||
|
BK/V1 |
|||||||
|
BK/U1 |
|||||||
|
1 a 2 a 3 a 4 a 5 a |
BU |
||||||
|
RD |
|||||||
|
WH |
|||||||
|
1b |
BK/1 |
||||||
|
2b |
BK/2 |
||||||
|
W2 |
U2 |
V2 |
W2 |
U2 |
V2 |
||
|
U1 |
V1 |
W1 |
U1 |
V1 |
W1 |
9007200445548683
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
41 |
||
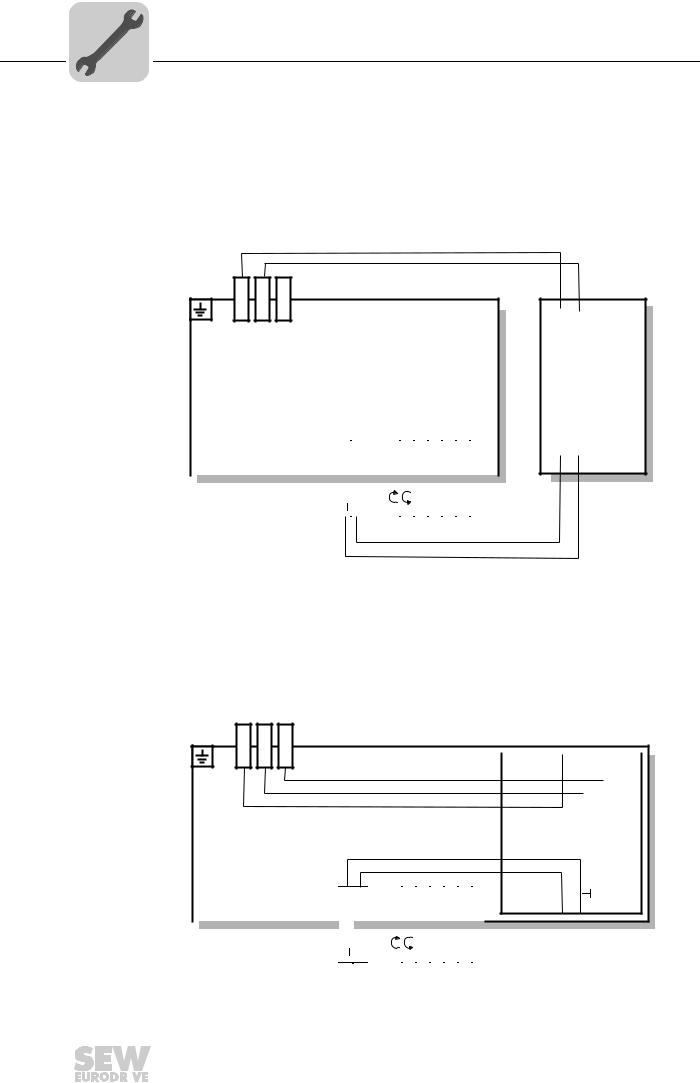
|
5 |
Electrical Installation |
Connection of the MOVIMOT® options |
5.5Connection of the MOVIMOT® options
5.5.1Connecting the MLU11A/MLU21A option
For more information about connecting the MLU11A and MLU21A options, refer to sec. «Connection of option MLU11A/MLU21A/MLG..A» (page 20).
The following figure shows how to connect the MLU11A and MLU21A options:
|
YE (MLU11A), BN (MLU21A) |
||
|
YE (MLU11A), BN (MLU21A) |
||
| <![if ! IE]>
<![endif]>X1:L1 |
<![if ! IE]>
<![endif]>X1:L2 |
<![if ! IE]>
<![endif]>X1:L3 |
|
MOVIMOT® |
| <![if ! IE]>
<![endif]>4,5,6 |
<![if ! IE]>
<![endif]>1,2,3 |
<![if ! IE]>
<![endif]>11,12 |
<![if ! IE]>
<![endif]>9,10 |
<![if ! IE]>
<![endif]>7,8 |
<![if ! IE]>
<![endif]>25,26 |
<![if ! IE]>
<![endif]>27,28 |
<![if ! IE]>
<![endif]>29,30 |
<![if ! IE]>
<![endif]>31,32 |
|||||||||
|
13 |
14 |
15 |
|||||||||||||||
|
X1: |
X1: |
X1: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
||||||
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R |
<![if ! IE]>
<![endif]>L |
<![if ! IE]>
<![endif]>f1/f2 |
<![if ! IE]>
<![endif]>K1a |
<![if ! IE]>
<![endif]>K1b |
<![if ! IE]>
<![endif]>RS- |
<![if ! IE]>
<![endif]>RS+ |
||||||||||
RD
BU
| <![if ! IE]>
<![endif]>L1 |
<![if ! IE]>
<![endif]>L2 |
MLU..A
<![if ! IE]>
<![endif]>24V
640436235
5.5.2Connection of MLU13A option
For more information about mounting the MLU13A option, refer to chapter «MLU13A option» (page 20).
The following figure shows how to connect the MLU13A option:
| <![if ! IE]>
<![endif]>X1: L1 |
<![if ! IE]>
<![endif]>X1: L2 |
<![if ! IE]>
<![endif]>X1: L3 |
|
13 |
14 |
15 |
||||
|
X1: |
X1: |
X1: |
||||
MOVIMOT®
YE
YE
YE
|
BU |
|||||||||
|
RD |
|||||||||
| <![if ! IE]>
<![endif]>X6: 4,5,6 |
<![if ! IE]>
<![endif]>X6: 1,2,3 |
<![if ! IE]>
<![endif]>X6: 11,12 |
<![if ! IE]>
<![endif]>X6: 9,10 |
<![if ! IE]>
<![endif]>X6: 7,8 |
<![if ! IE]>
<![endif]>X5: 25,26 |
<![if ! IE]>
<![endif]>X5: 27,28 |
<![if ! IE]>
<![endif]>X5: 29,30 |
<![if ! IE]>
<![endif]>X5: 31,32 |
|
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R |
<![if ! IE]>
<![endif]>L |
<![if ! IE]>
<![endif]>f1/f2 |
<![if ! IE]>
<![endif]>K1a |
<![if ! IE]>
<![endif]>K1b |
<![if ! IE]>
<![endif]>RS- |
<![if ! IE]>
<![endif]>RS+ |
||
| <![if ! IE]>
<![endif]>L1 |
<![if ! IE]>
<![endif]>L2 |
<![if ! IE]>
<![endif]>L3 |
|
MLU13A
<![if ! IE]>
<![endif]>24V
323967371
|
42 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
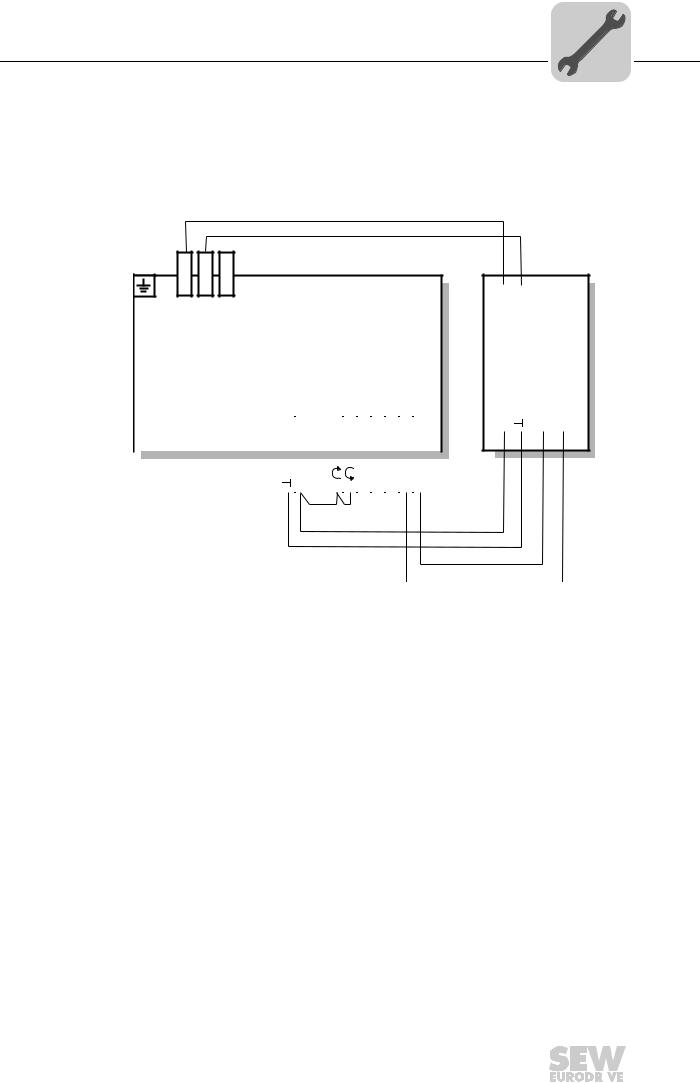
|
Electrical Installation |
5 |
|
Connection of the MOVIMOT® options |
5.5.3Connection of option MLG..A
For more information about mounting the MLG..A option, refer to sec. «MLU11A/
MLU21A/MLG..A option» (page 20).
The following figure shows how to connect the MLG..A option:
|
YE (MLG11A), BN (MLG21A) |
|||
|
YE (MLG11A), BN (MLG21A) |
|||
| <![if ! IE]>
<![endif]>X1: L1 |
<![if ! IE]>
<![endif]>X1: L2 |
<![if ! IE]>
<![endif]>X1: L3 |
MOVIMOT® |
| <![if ! IE]>
<![endif]>4,5,6 |
<![if ! IE]>
<![endif]>1,2,3 |
<![if ! IE]>
<![endif]>11,12 |
<![if ! IE]>
<![endif]>9,10 |
<![if ! IE]>
<![endif]>7,8 |
<![if ! IE]>
<![endif]>25,26 |
<![if ! IE]>
<![endif]>27,28 |
<![if ! IE]>
<![endif]>29,30 |
<![if ! IE]>
<![endif]>31,32 |
|||||||||
|
13 |
14 |
15 |
|||||||||||||||
|
X1: |
X1: |
X1: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
||||||
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R |
<![if ! IE]>
<![endif]>L |
<![if ! IE]>
<![endif]>f1/f2 |
<![if ! IE]>
<![endif]>K1a |
<![if ! IE]>
<![endif]>K1b |
<![if ! IE]>
<![endif]>RS- |
<![if ! IE]>
<![endif]>RS+ |
||||||||||
[1]
| <![if ! IE]>
<![endif]>L1 |
<![if ! IE]>
<![endif]>L2 |
MLG..A
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>RS+ |
<![if ! IE]>
<![endif]>RS- |
<![if ! IE]>
<![endif]>RD BU OG GN
641925899
[1]Note the enabled direction of rotation.
See chapter «Connection of the MOVIMOT® drive» (page 36),
Functions of the CW/Stop and CCW/Stop terminals using control via RS-485 interface
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
43 |
||
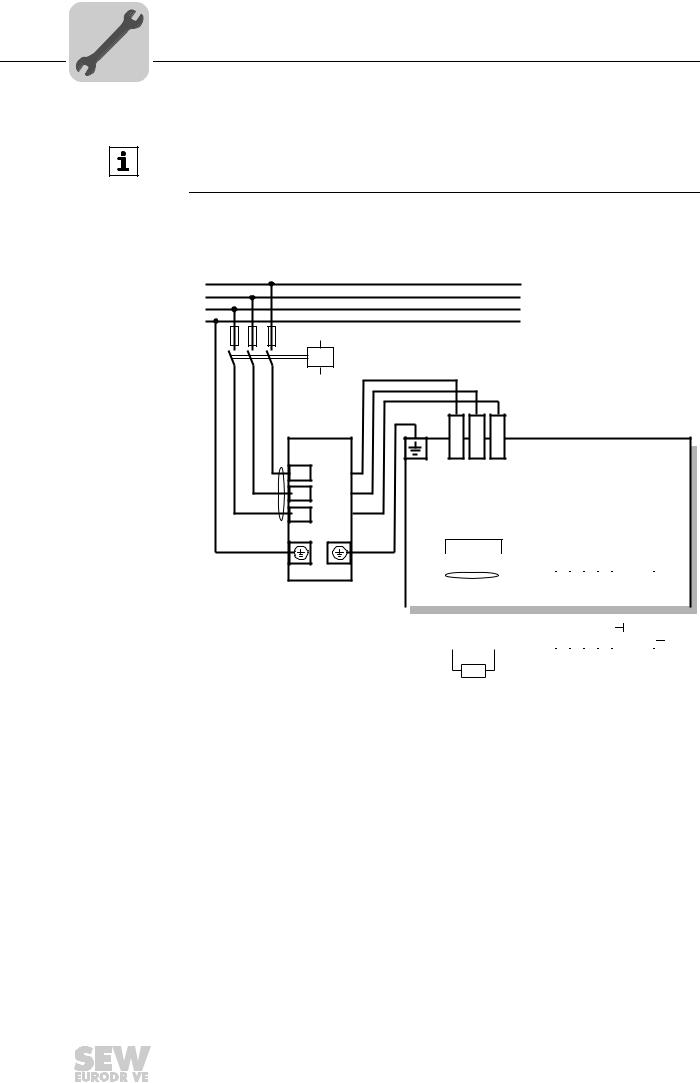
|
5 |
Electrical Installation |
|
Connection of the MOVIMOT® options |
5.5.4Connection of MNF21A option
INFORMATION
Only install this option in combination with the modular connection box of MOVIMOT®
MM03D-503-00 – MM15D-503-00.
For more information about mounting the MNF21A option, refer to chapter «MNF21A option» (page 22).
The following figure shows how to connect the MNF21A option:
L1
L2
L3
PE
F11/F12/F13
K11
|
MNF21A |
|
|
[1] |
|
|
L1 |
L1 |
|
L2 |
L2 |
|
L3 |
L3 |
| <![if ! IE]>
<![endif]>L1 |
<![if ! IE]>
<![endif]>L2 |
<![if ! IE]>
<![endif]>L3 |
||
| <![if ! IE]>
<![endif]>X1: |
<![if ! IE]>
<![endif]>X1: |
<![if ! IE]>
<![endif]>X1: |
MOVIMOT |
® |
BE/BR
|
RD |
WH |
BU |
||||||||||||||||||
|
[2] |
||||||||||||||||||||
| <![if ! IE]>
<![endif]>3,4 |
<![if ! IE]>
<![endif]>1,2 |
<![if ! IE]>
<![endif]>2a,2b |
<![if ! IE]>
<![endif]>1a,1b |
|||||||||||||||||
|
13 |
14 |
15 |
<![if ! IE]>
<![endif]>8 |
<![if ! IE]>
<![endif]>7 |
<![if ! IE]>
<![endif]>6 |
<![if ! IE]>
<![endif]>5 |
||||||||||||||
|
X1: |
X1: |
X1: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
||||||||||
| <![if ! IE]>
<![endif]>AS+ |
<![if ! IE]>
<![endif]>AS- |
<![if ! IE]>
<![endif]>DI2 |
<![if ! IE]>
<![endif]>DI3 |
<![if ! IE]>
<![endif]>V024 |
<![if ! IE]>
<![endif]>V0 |
<![if ! IE]>
<![endif]>24V |
||||||||||||||
 [2]
[2]
BW
[3]
1754451723
[1]Keep the cable length for the power supply as short as possible!
[2]Keep the length of the brake cables as short as possible!
Do not route the brake cables in parallel, but as far away from the power supply cables as possible!
[3]BW braking resistor (only in MOVIMOT® without mechanical brake)
|
44 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
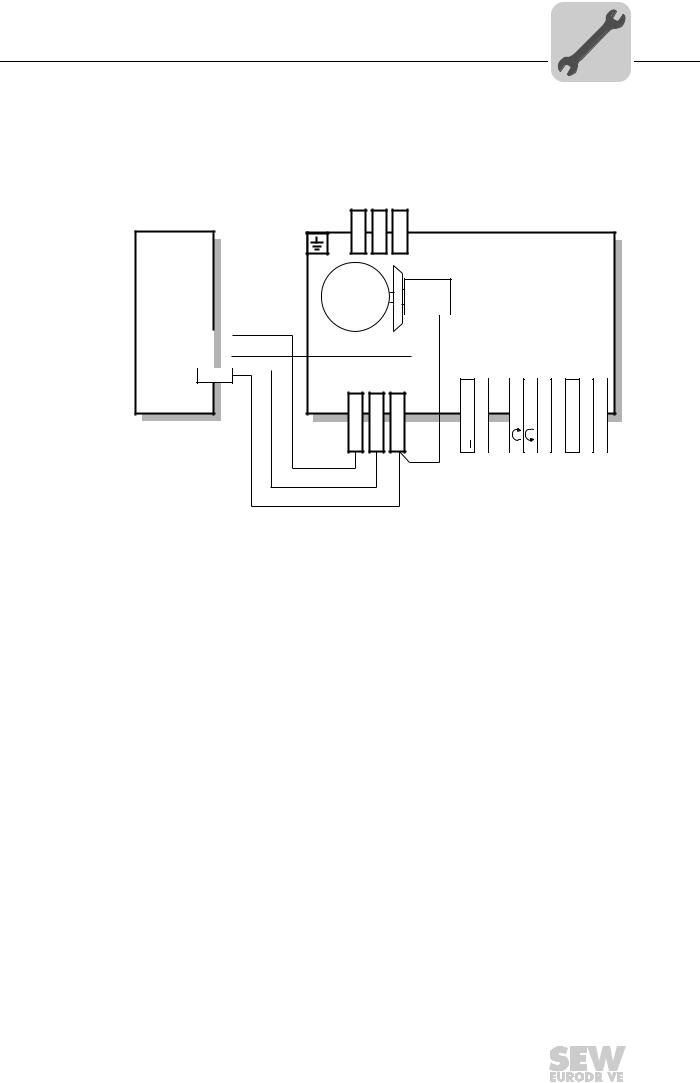
|
Electrical Installation |
5 |
|
Connection of the MOVIMOT® options |
5.5.5Connection of URM option
For more information about mounting the URM option, refer to chapter «URM/BEM option» (page 23).
The following figure shows how to connect the URM option:
|
URM |
<![if ! IE]>
<![endif]>X1: L1 |
<![if ! IE]>
<![endif]>X1: L2 |
<![if ! IE]>
<![endif]>X1: L3 |
MOVIMOT® |
|
13 |
||||||
|
RD |
||||||
|
14 |
||||||
|
WH |
||||||
|
15 |
||||||
|
13 |
14 |
15 |
<![if ! IE]>
<![endif]>4,5,6 |
<![if ! IE]>
<![endif]>1,2,3 |
<![if ! IE]>
<![endif]>11,12 |
<![if ! IE]>
<![endif]>9,10 |
<![if ! IE]>
<![endif]>7,8 |
<![if ! IE]>
<![endif]>25,26 |
<![if ! IE]>
<![endif]>27,28 |
<![if ! IE]>
<![endif]>29,30 |
<![if ! IE]>
<![endif]>31,32 |
|
X1: |
X1: |
X1: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R |
<![if ! IE]>
<![endif]>L |
<![if ! IE]>
<![endif]>f1/f2 |
<![if ! IE]>
<![endif]>K1a |
<![if ! IE]>
<![endif]>K1b |
<![if ! IE]>
<![endif]>RS- |
<![if ! IE]>
<![endif]>RS+ |
BU
324118411
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
45 |
||
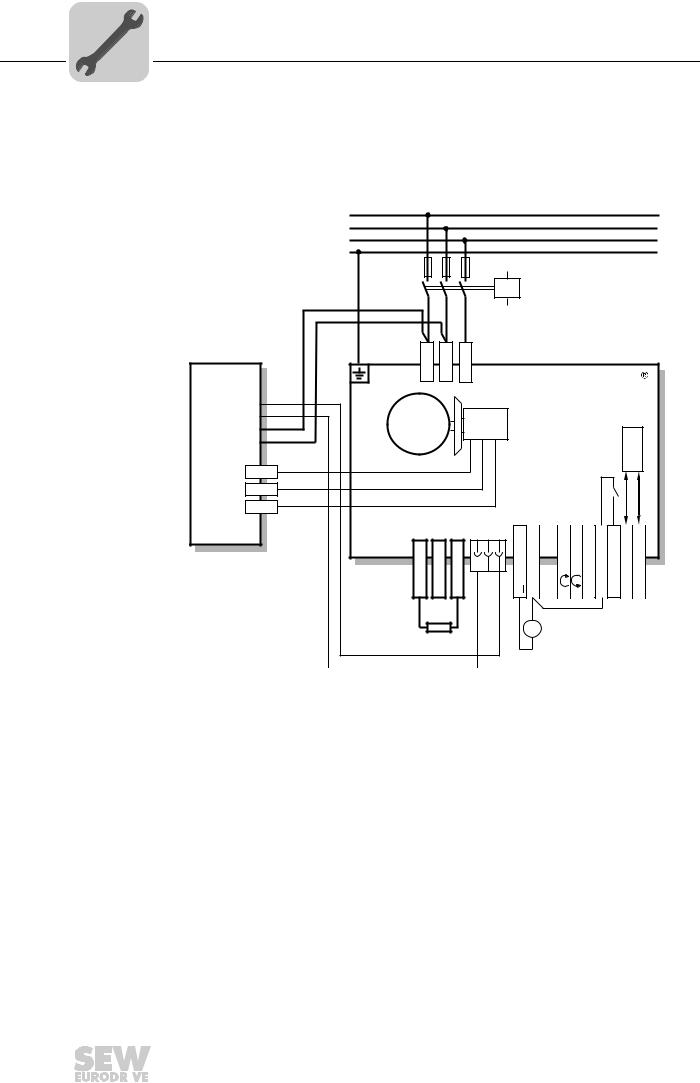
|
5 |
Electrical Installation |
|
Connection of the MOVIMOT® options |
5.5.6Connection of BEM option
For more information about mounting the BEM option, refer to chapter «URM/BEM/BES option» (page 23).
The following figure shows how to connect the BEM option:
|
L1 |
||||||||||||||||||
|
L2 |
||||||||||||||||||
|
L3 |
||||||||||||||||||
|
PE |
||||||||||||||||||
|
F11/F12/F13 |
||||||||||||||||||
|
K11 |
||||||||||||||||||
|
BEM |
<![if ! IE]>
<![endif]>X1: L1 |
<![if ! IE]>
<![endif]>X1: L2 |
<![if ! IE]>
<![endif]>X1: L3 |
MOVIMOT |
||||||||||||||
|
U |
<![if ! IE]>
<![endif]>+ |
RD |
||||||||||||||||
|
IN |
BU |
|||||||||||||||||
| <![if ! IE]>
<![endif]>_ |
M |
|||||||||||||||||
|
BK |
BE/BR |
|||||||||||||||||
|
U |
<![if ! IE]>
<![endif]>~ |
3~ |
485 |
|||||||||||||||
|
E |
<![if ! IE]>
<![endif]>~ |
BK |
||||||||||||||||
|
— |
||||||||||||||||||
|
RD |
RS |
|||||||||||||||||
|
13 |
||||||||||||||||||
|
14 |
WH |
<![if ! IE]>
<![endif]>K1 |
||||||||||||||||
|
15 |
BU |
|||||||||||||||||
| <![if ! IE]>
<![endif]>X10:1 |
<![if ! IE]>
<![endif]>X10:2 |
<![if ! IE]>
<![endif]>X10:3 |
||||||||||||||||
|
13 |
14 |
15 |
<![if ! IE]>
<![endif]>4,5,6 |
<![if ! IE]>
<![endif]>1,2,3 |
<![if ! IE]>
<![endif]>11,12 |
<![if ! IE]>
<![endif]>9,10 |
<![if ! IE]>
<![endif]>7,8 |
<![if ! IE]>
<![endif]>25,26 |
<![if ! IE]>
<![endif]>27,28 |
<![if ! IE]>
<![endif]>29,30 |
<![if ! IE]>
<![endif]>31,32 |
|||||||
|
X1: |
X1: |
X1: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: X6: X5: X5: X5: X5: |
||||||||||||
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R |
<![if ! IE]>
<![endif]>L |
<![if ! IE]>
<![endif]>f1/f2 |
<![if ! IE]>
<![endif]>K1a |
<![if ! IE]>
<![endif]>K1b |
<![if ! IE]>
<![endif]>RS- |
<![if ! IE]>
<![endif]>RS+ |
|||||||||||
|
+ |
||||||||||||||||||
|
= |
||||||||||||||||||
|
BW.. |
— |
|||||||||||||||||
|
324134539 |
|
46 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
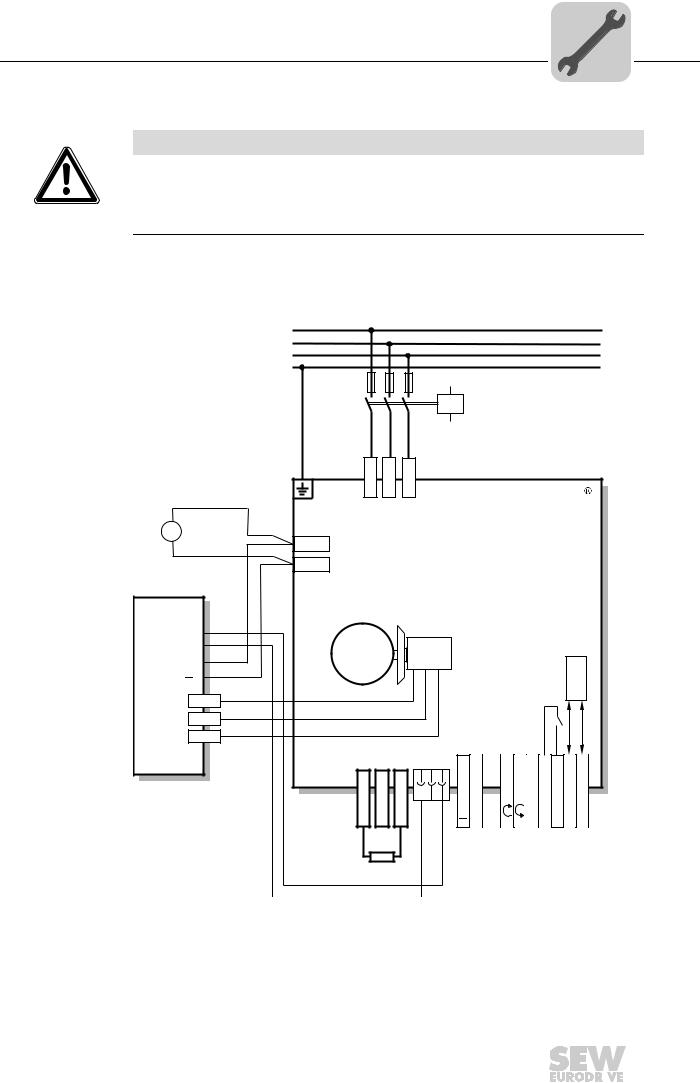
|
Electrical Installation |
5 |
|
Connection of the MOVIMOT® options |
5.5.7Connection of BES option
NOTICE
If the connection voltage is too high, the BES option or the brake coil connected to it can be damaged.
Damage to the BES option or the brake coil.
•Select a brake with a DC 24 V brake coil.
For more information about mounting the BES option, refer to chapter «URM/BEM/BES option» (page 23).
The following figure shows how to connect the BES option:
|
+ |
|
|
24 V |
= |
|
— |
|
|
BES [1] |
|
| <![if ! IE]>
<![endif]>IN |
|
| <![if ! IE]>
<![endif]>U |
|
| <![if ! IE]>
<![endif]>E |
|
| <![if ! IE]>
<![endif]>U |
|
L1 |
|||||||||||||||||
|
L2 |
|||||||||||||||||
|
L3 |
|||||||||||||||||
|
PE |
|||||||||||||||||
|
F11/F12/F13 |
|||||||||||||||||
|
K11 |
|||||||||||||||||
| <![if ! IE]>
<![endif]>X1: L1 |
<![if ! IE]>
<![endif]>X1: L2 |
<![if ! IE]>
<![endif]>X1: L3 |
MOVIMOT |
||||||||||||||
|
[3] |
|||||||||||||||||
|
DR.. |
|||||||||||||||||
|
+ |
RD |
||||||||||||||||
| <![if ! IE]>
<![endif]>- |
BU |
M |
|||||||||||||||
| <![if ! IE]>
<![endif]>24V |
RD |
3~ |
BE… |
485 |
|||||||||||||
|
BK |
|||||||||||||||||
|
— |
|||||||||||||||||
|
RD |
RS |
||||||||||||||||
|
13 |
|||||||||||||||||
|
14 |
WH |
<![if ! IE]>
<![endif]>K1 |
|||||||||||||||
|
15 |
BU |
||||||||||||||||
| <![if ! IE]>
<![endif]>X10:1 |
<![if ! IE]>
<![endif]>X10:2 |
<![if ! IE]>
<![endif]>X10:3 |
|||||||||||||||
|
13 |
14 |
15 |
<![if ! IE]>
<![endif]>4,5,6 |
<![if ! IE]>
<![endif]>1,2,3 |
<![if ! IE]>
<![endif]>11,12 |
<![if ! IE]>
<![endif]>9,10 |
<![if ! IE]>
<![endif]>7,8 |
<![if ! IE]>
<![endif]>25,26 |
<![if ! IE]>
<![endif]>27,28 |
<![if ! IE]>
<![endif]>29,30 |
<![if ! IE]>
<![endif]>31,32 |
||||||
|
X1: |
X1: |
X1: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
||||||
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R |
<![if ! IE]>
<![endif]>L |
<![if ! IE]>
<![endif]>f1/f2 |
<![if ! IE]>
<![endif]>K1a |
<![if ! IE]>
<![endif]>K1b |
<![if ! IE]>
<![endif]>RS- |
<![if ! IE]>
<![endif]>RS+ |
||||||||||
|
[2] |
|||||||||||||||||
|
1711602315 |
[1]BES brake control mounted in the connection box
[2]External BW braking resistor
[3]Additional terminals for DC 24 V brake supply
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
47 |
||
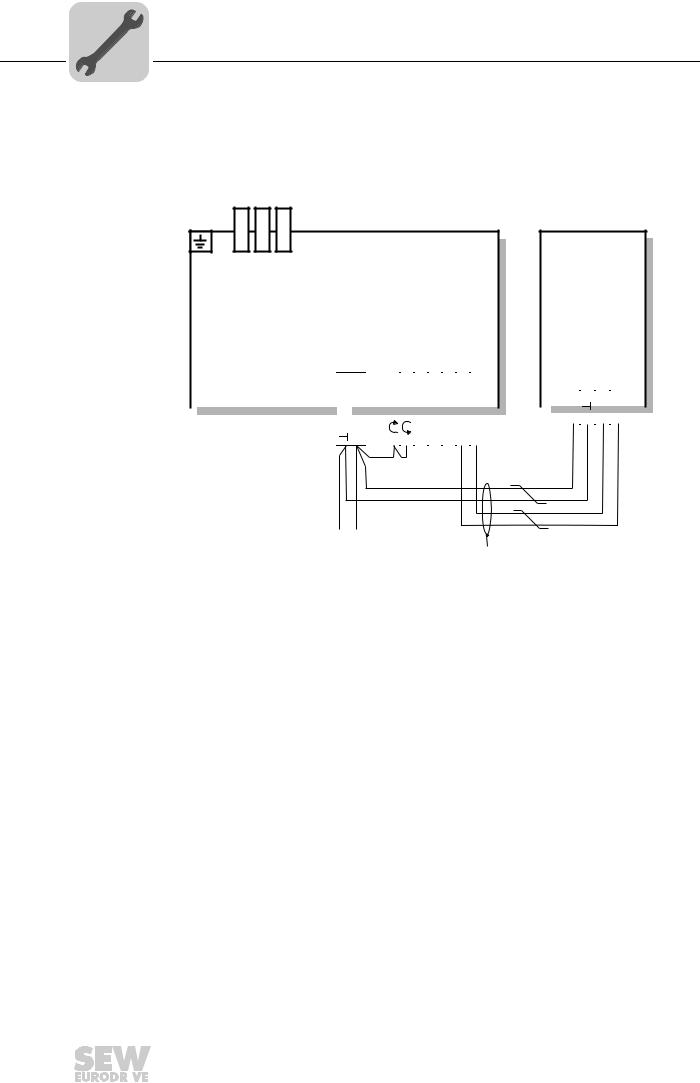
|
5 |
Electrical Installation |
|
Connection of the MOVIMOT® options |
5.5.8Connection of MBG11A option
For more information about mounting the MBG11A option, refer to sec. «MBG11A option» (page 24).
The following figure shows how to connect the MBG11A option:
| <![if ! IE]>
<![endif]>X1: L1 |
<![if ! IE]>
<![endif]>X1: L2 |
<![if ! IE]>
<![endif]>X1: L3 |
|
13 |
14 |
15 |
||||
|
X1: |
X1: |
X1: |
||||
MOVIMOT®
MBG11A
| <![if ! IE]>
<![endif]>X6: 4,5,6 |
<![if ! IE]>
<![endif]>X6: 1,2,3 |
<![if ! IE]>
<![endif]>X6: 11,12 |
<![if ! IE]>
<![endif]>X6: 9,10 |
<![if ! IE]>
<![endif]>X6: 7,8 |
<![if ! IE]>
<![endif]>X5: 25,26 |
<![if ! IE]>
<![endif]>X5: 27,28 |
<![if ! IE]>
<![endif]>X5: 29,30 |
<![if ! IE]>
<![endif]>X5: 31,32 |
|||||||||
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>RS+ |
<![if ! IE]>
<![endif]>RS- |
|||||||||||||||
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R |
<![if ! IE]>
<![endif]>L |
<![if ! IE]>
<![endif]>f1/f2 |
<![if ! IE]>
<![endif]>K1a |
<![if ! IE]>
<![endif]>K1b |
<![if ! IE]>
<![endif]>RS- |
<![if ! IE]>
<![endif]>RS+ |
||||||||||
[1]
 24 VDC
24 VDC
[2]
324046731
[1]Note the enabled direction of rotation.
See chapter «Connection of the MOVIMOT® drive» (page 36),
Functions of the CW/Stop and CCW/Stop terminals using control via RS-485 interface
[2]EMC metal cable gland
|
48 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
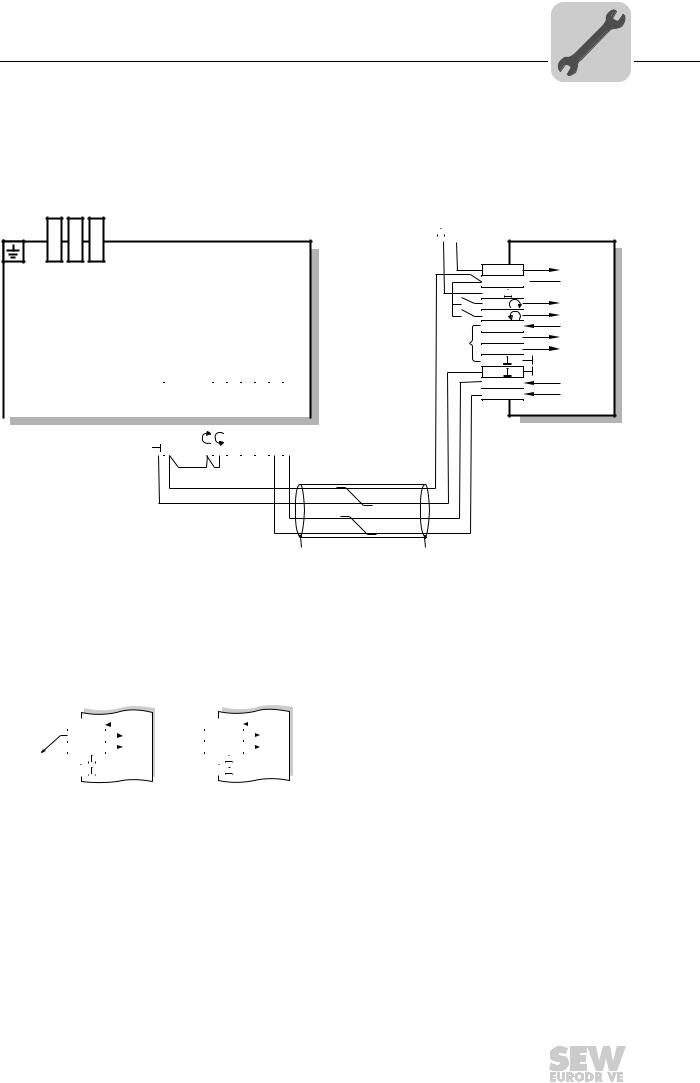
|
Electrical Installation |
5 |
|
Connection of the MOVIMOT® options |
5.5.9Connection of MWA21A option
For more information about mounting the MWA21A option, refer to sec. «MWA21A option» (page 25).
The following figure shows how to connect the MWA21A option:
| <![if ! IE]>
<![endif]>X1: L1 |
<![if ! IE]>
<![endif]>X1: L2 |
<![if ! IE]>
<![endif]>X1: L3 |
MOVIMOT® |
| <![if ! IE]>
<![endif]>4,5,6 |
<![if ! IE]>
<![endif]>1,2,3 |
<![if ! IE]>
<![endif]>11,12 |
<![if ! IE]>
<![endif]>9,10 |
<![if ! IE]>
<![endif]>7,8 |
<![if ! IE]>
<![endif]>25,26 |
<![if ! IE]>
<![endif]>27,28 |
<![if ! IE]>
<![endif]>29,30 |
<![if ! IE]>
<![endif]>31,32 |
|||||||||
|
13 |
14 |
15 |
|||||||||||||||
|
X1: |
X1: |
X1: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X6: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
<![if ! IE]>
<![endif]>X5: |
||||||
| <![if ! IE]>
<![endif]>24V |
<![if ! IE]>
<![endif]>R |
<![if ! IE]>
<![endif]>L |
<![if ! IE]>
<![endif]>f1/f2 |
<![if ! IE]>
<![endif]>K1a |
<![if ! IE]>
<![endif]>K1b |
<![if ! IE]>
<![endif]>RS- |
<![if ! IE]>
<![endif]>RS+ |
[1]
[2]
 24VDC
24VDC
MWA21A
124V
224V 
3

|
4 |
R |
|
|
5 |
L |
|
|
6 |
10V |
|
|
[3] |
7 |
+ |
|
8 |
— |
|
|
9 |
||
|
10 |
||
|
11 RS+ |
||
|
12 RS- |
[2]
324061323
[1]Note the enabled direction of rotation.
See chapter «Connection of the MOVIMOT® drive» (page 36),
Functions of the CW/Stop and CCW/Stop terminals using control via RS-485 interface
[2]EMC metal cable gland
[3]Potentiometer using the 10 V reference voltage [A] or potential-free analog signal [B]
<![if ! IE]>
<![endif]>MWA21A
<![if ! IE]>
<![endif]>MWA21A
324089483
|
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
49 |
||
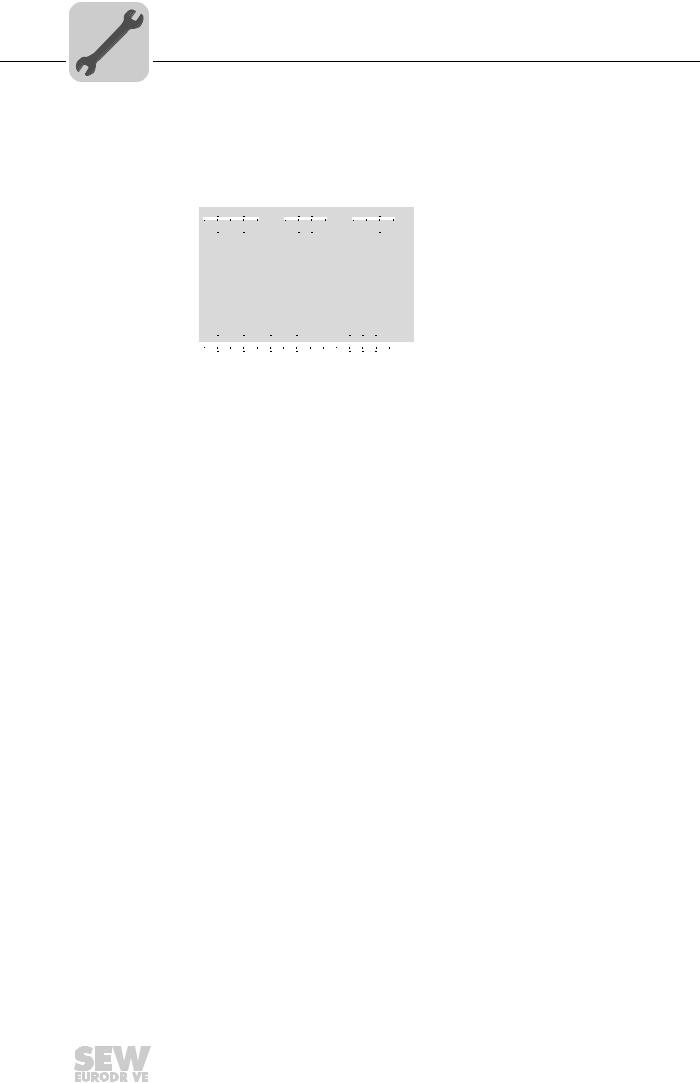
|
5 |
Electrical Installation |
|
Connection of the MOVIMOT® options |
5.5.10 Connection of MWF11A option
For more information about mounting the MWF11A option, refer to chapter «MWF11A option» (page 26).
The following figure shows how to connect the MWF11A option:
|
4 |
3 |
2 |
1 |
3 |
2 |
1 |
3 |
2 |
1 |
||||||||||||
|
X1 |
X2 |
X3 |
|||||||||||||||||||
|
MWF11A |
|||||||||||||||||||||
|
X4 |
X5 |
||||||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
1 |
2 |
3 |
4 |
|||||||||
|
3184574347 |
|||||||||||||||||||||
|
RS-485 interface |
|||||||||||||||||||||
|
X1 |
1 |
RS-485 + connection to MOVIMOT® |
|||||||||||||||||||
|
2 |
RS-485- connection to MOVIMOT® |
||||||||||||||||||||
|
3 |
RS-485 GND connection to MOVIMOT® |
||||||||||||||||||||
|
4 |
Shielding |
||||||||||||||||||||
|
Frequency input |
|||||||||||||||||||||
|
X2 |
1 |
A |
|||||||||||||||||||
|
2 |
No function |
||||||||||||||||||||
|
3 |
GND |
||||||||||||||||||||
|
Voltage supply |
|||||||||||||||||||||
|
X3 |
1 |
+24 V (IN) |
|||||||||||||||||||
|
2 |
+24 V (OUT) |
||||||||||||||||||||
|
3 |
GND |
||||||||||||||||||||
|
Control terminals |
|||||||||||||||||||||
|
X4 |
1 |
Enable CW |
|||||||||||||||||||
|
2 |
Enable CCW |
||||||||||||||||||||
|
3 |
Enable/rapid stop |
||||||||||||||||||||
|
4 |
n11 |
||||||||||||||||||||
|
5 |
n12 |
||||||||||||||||||||
|
6 |
Error reset |
||||||||||||||||||||
|
7 |
/output fault |
||||||||||||||||||||
|
8 |
/output (short-circuit proof) fault |
||||||||||||||||||||
|
9 |
GND |
||||||||||||||||||||
|
Analog input (differential) |
|||||||||||||||||||||
|
X5 |
1 |
10 V off (for 47 kΩ potentiometer) |
|||||||||||||||||||
|
2 |
AI11 |
||||||||||||||||||||
|
3 |
AI12 (reference) |
||||||||||||||||||||
|
4 |
GND |
||||||||||||||||||||
|
50 |
Operating Instructions – MOVIMOT® MM..D with DRS/DRE/DRP AC Motor |
||
 Loading…
Loading…
Loading…

T
MOVIMOT®
Operating Instructions
Category 3D
(Dust Explosion Protection)
Edition 03/2000
09/011/98
<![if ! IE]>
<![endif]>0918 581X / 0300

Contents
 I 0
I 0
kVA n f
i
P Hz
|
1 |
Important Notes……………………………………………………………………………………. |
4 |
|
|
2 |
Safety Notes ………………………………………………………………………………………… |
5 |
|
|
2.1 |
Information for using MOVIMOT®in category 3D………………………………. |
6 |
|
|
3 |
Structure of the Unit …………………………………………………………………………….. |
7 |
|
|
3.1 |
Type designation, nameplates ………………………………………………………… |
7 |
|
|
3.2 |
Structure of the inverter unit……………………………………………………………. |
8 |
|
|
3.3 |
Description of the controls ……………………………………………………………… |
9 |
|
|
4 |
Mechanical Installation……………………………………………………………………….. |
10 |
|
5 |
Electrical Installation ………………………………………………………………………….. |
11 |
|
|
5.1 |
Installation guidelines…………………………………………………………………… |
11 |
|
|
5.2 |
Protection concept ………………………………………………………………………. |
13 |
|
|
5.3 |
Operating modes ………………………………………………………………………… |
13 |
|
|
5.4 |
Connection with binary control………………………………………………………. |
14 |
|
|
5.5 |
Connection with MLA12A option……………………………………………………. |
15 |
|
|
5.6 |
Connection with RS-485 bus mode ……………………………………………….. |
16 |
|
6 |
Startup……………………………………………………………………………………………….. |
17 |
|
|
6.1 |
Important startup instructions………………………………………………………… |
17 |
|
|
6.2 |
Startup with binary control ……………………………………………………………. |
18 |
|
|
6.3 |
Startup with the MLA12A option ……………………………………………………. |
20 |
|
|
6.4 |
Startup with RS-485 bus operation ………………………………………………… |
22 |
|
|
6.5 |
Serial communication…………………………………………………………………… |
24 |
|
7 |
Operation and Service ………………………………………………………………………… |
26 |
|
|
7.1 |
Status LED…………………………………………………………………………………. |
26 |
|
|
7.2 |
Status LED messages …………………………………………………………………. |
26 |
|
|
7.3 |
List of errors ……………………………………………………………………………….. |
27 |
|
8 |
Inspection and Maintenance ……………………………………………………………….. |
28 |
|
|
8.1 |
Inspection and maintenance periods …………………………………………….. |
28 |
|
|
8.2 |
Inspection and maintenance work on the motor ……………………………… |
29 |
|
|
8.3 |
Inspection and maintenance of the brake ……………………………………….. |
31 |
|
9 |
Technical data (relating to 4 kHz PWM frequency) ……………………………….. |
36 |
|
|
9.1 |
MOVIMOT®in category 3D ………………………………………………………….. |
36 |
|
|
9.2 |
Technical data MLA12A option ……………………………………………………… |
37 |
|
|
9.3 |
Regenerative load capacity of brake coil ………………………………………… |
37 |
|
|
9.4 |
Work done until adjustment, working air gap, braking torque of brake … |
37 |
|
|
9.5 |
Approved ball bearing types …………………………………………………………. |
38 |
|
|
9.6 |
Operating characteristics ……………………………………………………………… |
38 |
|
|
9.7 |
Declaration by the manufacturer……………………………………………………. |
39 |
|
Operating Instructions MOVIMOT®MM..B for Use According to Category 3D |
3 |
||

1 Important Notes
Always following the safety and warning instructions contained in this publication!
Electrical hazard
Possible consequences: Severe or fatal injuries.
Hazard
Possible consequences: Severe or fatal injuries.
Hazardous situation
Possible consequences: Slight or minor injuries.
Harmful situation
Possible consequences: Damage to the unit and the environment.
Tips and useful information
Important information about explosion protection
A requirement of fault-free operation and fulfillment of any rights to claim under guarantee is that the information in the operating instructions is adhered to. Consequently, read the operating instructions before you start working with the unit!
The operating instructions contain important information about servicing; as a result, they should be kept in the vicinity of the unit.
Waste disposal This product consists of
•Iron
|
• |
Aluminum |
|
• |
Copper |
|
• |
Plastic |
|
• |
Electronics components |
Please dispose of the parts in accordance with the applicable regulations.
|
4 |
Operating Instructions MOVIMOT®MM..B for Use According to Category 3D |
||

2Safety Notes
•Never install damaged products or take them into operation. Please submit a complaint to the transport company immediately in the event of damage.
•Only electrical specialists with the relevant accident prevention training are allowed to perform installation, startup and service work on the unit. They must also comply with the regulations in force (e.g. EN 60204, VBG 4, DIN-VDE 0100/ 0113/0160).
•Make sure that preventive measures and protection devices correspond to the applicable regulations (e.g. EN 60204 or EN 50178).
Necessary protective measures: Grounding the unit
•Disconnect the unit from the supply system prior to removing the connection box cover. Dangerous voltages may still be present for up to 1 minute after mains disconnection.
•Keep the connection box cover closed during operation.
•Just because the status LED and other display elements have gone out does not mean that the unit has been disconnected from the power supply and is deenergized.
•Mechanical blockage or unit internal safety functions of MOVIMOT® can lead to
a motor standstill. The removal of the source of the interruption or a reset of MOVIMOT®can result in an automatic restart of the motor. If, for safety reasons, this is not permissible for the driven machine, the MOVIMOT® must be disconnected from the supply system before correcting the fault.
•Important: MOVIMOT®is not suitable for hoist applications!
•Important – Danger of burns: The surface temperature of MOVIMOT® units (in particular that of the heat sink) may exceed 60° C during operation!
|
Operating Instructions MOVIMOT®MM..B for Use According to Category 3D |
5 |
||

2.1Information for using MOVIMOT® in category 3D
|
Standards |
MOVIMOT® units in category 3D comply with EN 50014 («Electrical apparatus for po- |
|
|
tentially explosive atmospheres; general requirements», 2nd edition) and EN 50281-1- |
||
|
1:1998 («Electrical apparatus for use in atmospheres containing flammable dust»), and |
||
|
therefore conform to Directive 94/9/EC (ATEX 100a). |
||
|
Enclosure of the |
MOVIMOT® units in category 3D are supplied with enclosure IP54 at least. The enclo- |
|
|
housing |
sure has to be maintained over the complete operating time as a precondition for satis- |
|
|
fying the requirements for devices in category 3D. For this reason, particular care must |
||
|
be taken even when connecting the units. |
||
|
The unit must not be operated in zone 22 atmospheres if the enclosure type is not as- |
||
|
sured! |
||
|
Applications |
• |
Unit group II |
|
• |
Category 3D |
• For use in zone 22
• Surface temperature 140 °C
• Ambient temperature -20 to +40 °C
|
6 |
Operating Instructions MOVIMOT®MM..B for Use According to Category 3D |
||
|
Type designation, nameplates |
3 |
3 Structure of the Unit
3.1Type designation, nameplates
Type designation
example MOVIMOT® MM 22 B — 503 — 04
 Version (04 = 3D category)
Version (04 = 3D category)
Connection type
Supply voltage
Version B
Motor rating
®
MOVIMOT Series
02883AEN
MOVIMOT® nameplate (example)
|
Bruchsal/Germany |
||||||||
|
Typ |
KA67DT100L4BMGMM30B/MLA |
3 |
IEC 34 |
|||||
|
Nr. |
010012345.6.00.00 |
IM |
B3 |
|||||
|
kW |
2,2 / 50Hz |
cos |
0,99 |
|||||
|
50Hz V |
400-460 |
A |
5,0 |
|||||
|
60Hz V |
400-460 |
A |
5,0 |
|||||
|
r/min |
92/1400 |
IP |
54 |
Kl. |
F |
|||
|
Bremse |
V |
110 |
Nm 40 |
Gleichrichter |
||||
|
Kg |
54 |
Ma 310 |
Nm |
II 3 D |
T 140°C |
|||
|
i |
15,19 |
:1 |
||||||
|
Schmierstoff |
Made in Germany |
186 853 5.10 |
03090AXX
Electronics nameplate (example)
02581AXX
|
Operating Instructions MOVIMOT®MM..B for Use According to Category 3D |
7 |
||

|
3 |
Structure of the inverter unit |
3.2Structure of the inverter unit
|
18 |
1 |
2 |
3 |
4 |
|
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
||||||||||||||||
02882AXX
Bild 1: Structure of the unit
1Identification of the circuit type
2Connection box
3Connection plug, connection unit with inverter
4Connection box cover with inverter and heat sink
5Connection unit with terminals
6Electronics terminal strip X2
7Connection of brake coil (X3)
For motors without a brake: Connection of internal braking resistor BW1/BW2 (standard)
8Power system connection L1, L2, L3 (X3) (suitable for 2 x 4 mm2)
9Screws for PE connection y
|
10 Cable screw fittings |
MM03B-MM15B: (2 x PG11 and 2 x PG16 |
/ from start of 2000, |
2 x M16 and 4 x M25) |
|
(not all visible in picture) MM22B-MM30B: (4 x PG11 and 4 x PG16 |
/ from start of 2000, |
4 x M16 and 4 x M25) |
11Electronics nameplate
12Safety hood for inverter electronics
13Setpoint potentiometer f1 (not visible),
accessible from the top of the connection box cover by means of a PG screw fitting
14Setpoint switch f2 (green)
15Switch t1 for ramp generator (white)
16DIP switch S1 for setting the bus address, motor protection, DC braking, PWM frequency
17Status LED (visible from the top of the connection box cover, see “Status LED” on page 26)
18Terminals for TH connection (arrangement of terminals varies according to the size of the MOVIMOT®unit)
|
8 |
Operating Instructions MOVIMOT®MM..B for Use According to Category 3D |
||

|
Description of the controls |
3 |
3.3Description of the controls
DIP SWITCH S1
|
S1/.. |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
||
|
ON |
20 |
21 |
22 |
23 |
Motor protection |
DC braking |
PWM frequency |
|||
|
deactivated |
16 kHz |
1) |
variable |
No func- |
||||||
|
OFF |
RS-485 address |
Motor protection |
4Q operation * |
PWM frequency |
tion |
|||||
|
active * |
4 kHz fix * |
|||||||||
1)16 kHz PWM frequency (low-noise)
When DIP SWITCH S1/7 = ON, the units operate with a 16 kHz PWM frequency (low noise) and switch back in steps to lower pulse frequencies depending on the heat sink temperature.
*Factory setting
Setpoint potentiometer f1
Setpoint switch f2
3
4 5
6
7 8
The function of the potentiometer changes depending on the unit’s operating mode.
•Control via terminals: Setpoint f1 (selected by tl. f1/f2 = “0”)
|
• Control via RS-485: |
Maximum frequency fmax |
|
|
100 |
||
|
f [Hz] |
||
|
75 |
f1 |
|
|
5 |
6 |
|
|
50 |
||
|
25 |
||
|
2 |
2 3 4 5 6 7 8 9 10 Pot. position |
|
|
0 1 |
02704AEN
The function of the switch changes depending on the unit’s operating mode.
•Control via terminals: Setpoint f2 (selected by tl. f1/f2 = “1”)
|
• Control via RS-485: |
Minimum frequency fmin |
|||||||||||
|
Setpoint switch f2 |
||||||||||||
|
Detent position |
0 * |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
Setpoint f2 [Hz] |
5 * |
7 |
10 |
15 |
20 |
25 |
35 |
50 |
60 |
70 |
100 |
|
|
Minimum frequency fmin |
2 * |
5 |
7 |
10 |
12 |
15 |
20 |
25 |
30 |
35 |
40 |
|
|
[Hz] |
||||||||||||
|
* Factory setting |
Switch t1
|
3 |
|
|
4 |
|
| <![if ! IE]>
<![endif]>5 |
|
|
6 |
|
|
8 |
7 |
For ramp generator
|
Switch t1 |
|||||||||||
|
Detent position |
0 |
1 |
2 |
3 |
4 |
5 * |
6 |
7 |
8 |
9 |
10 |
|
Ramp time t1 [s] |
0.1 |
0.2 |
0.3 |
0.5 |
0.7 |
1 * |
2 |
3 |
5 |
7 |
10 |
* Factory setting
|
Operating Instructions MOVIMOT®MM..B for Use According to Category 3D |
9 |
||

|
4 |
Mechanical Installation |
4 Mechanical Installation
Before you begin MOVIMOT®may not be installed unless:
•the entries on the name plate of the drive match the mains power supply,
• the drive is undamaged (no damage caused by transport or storage) and
•it is certain that the following requirements have been fulfilled:
–ambient temperatures between -20 °C and +40 °C (remember that the temperature range of the gear unit may be restricted → operating instructions for the gear unit),
–no oil, acid, gas, vapors, radiation, etc.,
–installation altitude max. 1000 m above sea level.
Installation toler-
|
ances |
Shaft end |
Flanges |
||
|
Diametric tolerance in accordance with DIN 748 |
Centering shoulder tolerance in accordance with DIN |
|||
|
• |
ISO k6 at ≤ 50 mm |
42948 |
||
|
• |
ISO m6 at > 50 mm |
• |
ISO j6 at ≤ 230 mm |
|
|
(Center hole in accordance with DIN 332, shape DR) |
• |
ISO h6 at > 230 mm |
||
|
→ ”MOVIMOT®Geared Motors” catalog, section ”Notes on Dimension Sheets.” |
||||
|
Setting up |
The MOVIMOT®may only be mounted or installed in the specified mounting position on |
|||
|
MOVIMOT ® |
a level, vibration-proof and torsionally rigid support structure. |
•Thoroughly remove anti-corrosion agents from the shaft ends (use a commercially available solvent). Do not allow the solvent to penetrate the bearings and shaft seals – this could cause material damage!
•Carefully align MOVIMOT® and the driven machine to avoid placing any unacceptable strain on the motor shafts (observe permissible overhung load and axial thrust data!).
•Do not butt or hammer the shaft end.
•Use an appropriate cover to protect motors in vertical mounting positions from accidental entering of objects or fluids ! (Protection cowl C)
•Ensure an unobstructed cooling air supply and that air heated by other units cannot be drawn in or reused.
•Balance components for subsequent mounting on the shaft with a half key (output shafts are balanced with a half key).
|
10 |
Operating Instructions MOVIMOT®MM..B for Use According to Category 3D |
||
![]()
|
Installation guidelines |
5 |
5 Electrical Installation
It is essential to comply with the safety notes (see page 5) during installation!
5.1Installation guidelines
When connecting up, comply with the following ElexV 1 provisions (or other nationally valid regulations) in addition to the generally applicable installation regulations:
•EN 60 079-14 (“Installation of electrical systems in hazardous areas”)
•EN 50281-1-2 (“Electrical tools and fixtures for use in atmospheres containing flammable dust”)
•DIN VDE 0105-9 (“Operation of electrical systems”) 1)
•DIN VDE 0100 (“Setup of power installations up to 1000 V”) 1)
•and provisions specifically relating to the system
Connecting supply system leads
|
Rated voltage and |
• The rated voltage and frequency of MOVIMOT ®must correspond to the data for the |
|
frequency |
mains supply. |
|
Selecting the |
• The cross sections of the cables used must be selected according to the rated cur- |
|
cables |
rent of the unit and the applicable installation regulations. |
|
• The selection of the cable type is based on the applicable installation regulations |
|
|
and the requirements at the application location. |
Permitted line cross section of the terminals
|
Power terminals |
Control terminals |
|
1.0 mm2 – 4.0 mm2 (2 x 4.0 mm2) |
0.25 mm2 – 1.0 mm2 (2 x 0.75 mm2) |
|
AWG17 – AWG10 (2 x AWG10) |
AWG22 – AWG17 (2 x AWG18) |
|
Conductor end |
• Use conductor end sleeves without insulating shrouds |
|
sleeves |
(DIN 46228 part 1, material E-CU) |
|
Cable entries |
• All cable entries are supplied fitted with a closing plug. |
|
To connect the unit, replace the required number of plugs with suitable cable entries |
|
|
which are fitted with strain relief. |
|
|
• The cable entries must meet the requirements of EN 50 014, 2nd edition. |
|
|
• Select the cable entries on the basis of the diameter of the cables used. Please |
|
|
refer to the documentation provided by the manufacturer of the cable entry for fur- |
|
|
ther information. |
|
|
Line protection |
• Install the line protection at the start of the supply system lead behind the supply |
|
bus junction (see section 5.4 to section 5.6: F11/F12/F13). Use D, DO, NH or circuit |
|
|
breakers. The fusible rating should be selected in accordance with the cross section |
|
|
of the cable. |
|
|
Residual-current- |
• It is not permissible to use a conventional residual-current-operated circuit breaker |
|
operated circuit |
(r.c.c.b.) as a protective device. Universal current-sensitive residual-current-oper- |
|
breaker |
ated circuit breakers (tripping current 300 mA) are permissible as a protective |
|
device. Earth-leakage currents > 3.5 mA may occur during normal operation of the |
|
|
MOVIMOT®. |
|
|
Contactor switch |
• Contactor switch contacts in utilization category AC-3 to IEC 158 must be used for |
|
contacts |
switching MOVIMOT®. |
1. Or other national guidelines
|
Operating Instructions MOVIMOT®MM..B for Use According to Category 3D |
11 |
||

|
5 |
Installation guidelines |
IT systems
Connecting 24 VDC supply
Conventional control (using binary commands)
Control via RS-485 interface
•SEW recommends using earth-leakage monitors with a pulse code measuring process in voltage power systems with a non-earthed star point (IT systems). This avoids faulty tripping of the earth-leakage monitor due to the earth capacitance of the inverter.
•The MOVIMOT®power supply should be either from an external 24 VDC voltage or using the MLA12A options.
•Connect the required electronic control leads
(e.g. CW/STOP, CCW/STOP, setpoint changeover f1/f2).
•Use shielded cables as control leads and route them separately from power current cables.
With PLC bus master or MLA12A option
•Important: Only ever connect one bus master.
•Use twisted pair shielded cables as control leads and route them separately from power current cables.
|
Cable screw fit- |
• All cable entries which are not required must be sealed properly using |
|
tings |
suitable closing plugs. |
|
12 |
Operating Instructions MOVIMOT®MM..B for Use According to Category 3D |
||
You can only view or download manuals with
Sign Up and get 5 for free
Upload your files to the site. You get 1 for each file you add
Get 1 for every time someone downloads your manual
Buy as many as you need
-
MOVIMOT MM..C
08/2003
11218169 / RU
-
SEW-EURODRIVE
-
MOVIMOT MM03C — MM3XC 3
1
…………………………………………………………………………………
52 ……………………………………………………..
73
………………………………………………………………………………………….
83.1 MOVIMOT ( ) ……………… 83.2 (MOVIMOT ) …… 93.3
MOVIMOT (AS-)
…………………………………………………………..
123.4 (MOVIMOTAS-)
…………………………………………………………………………
134
……………………………………………………………………….
164.1 —
MOVIMOT………………………………………………………..
164.2 …………………………………………………….
174.3 MOVIMOTP2.A …………………………………………… 194.4
MLU..A / MLG..A / MLK11A………………. 204.5
MBG11A…………………………………………. 214.6
MWA21A ………………………………………… 214.7 URM
………………………………………………. 225 MOVIMOT ………. 23
5.1
………………………………………………………………….
235.2 MOVIMOT …………………………………… 255.3
MOVIMOT…………………………………………………
265.4 MOVIMOT ………………… 275.5 RS-485
………………………………… 315.6 MOVIMOT …….
326 MOVIMOT AS-
………………………………………………………………………………….
376.1
………………………………………………………………….
376.2 MOVIMOTAS-…………………………………………………………………………..
396.3 MOVIMOT MM../AVSK ( A)……………………….. 426.4
MOVIMOT MM../AZSK ( B) ……………………….. 436.5 MOVIMOT
MM../AND3/AZSK ( C) ……………… 446.6 URM
………………………… 456.7 MOVIMOT ……. 467 MOVIMOT …………. 51
7.1 …………………………………. 517.2
……………………………………………….. 517.3 DIP-
S1 …………………………………………………. 537.4
DIP- S2 …………………………………………………
557.5 MM..C-503-00 …………. 587.6( )
………………………………………………………..
777.7 MBG11AMLG11A……………………………………………………………………………….
797.8 MWA21A( )…………………………………………… 827.9
I/O- AS-i-MLK11A
……………………………………………………………………………………..
857.10………………………………………………………………
88 -
4 MOVIMOT MM03C — MM3XC
8 MOVIMOT AS-
………………………………………………………………………………….
908.1 …………………………………. 908.2
………………………………………………. 908.3 DIP-
S3 ………………………………………………… 928.4
DIP- S4 ………………………………………………….
948.5 MM..C-503-30 …………. 958.6
……………………………. 1028.7 MOVITOOLS……..
1068.8…………………………………………………………….
1159 /
………………………………………………………………………………………………
1179.1 ……………………………. 1179.2
………………………………………………….
1199.3RS-485………………………………………………………………….
12210
……………………………………………………………………………………..
12710.1 MOVIMOT ………………….. 12710.2 MOVIMOT
AS-…………………………………………………………………………
13210.3 , ………………………….. 14011 …………………………………………….. 141
11.1 ……………… 14111.2 / ………… 14211.3 /
…………… 14411.4
………………………………………………………..
14811.5 , ………………………………. 14812
………………………………………………………………………………………
14912.1 IEC 380…500 ~ … 14912.2 UL 380…500 ~ …. 15012.3
………………………. 15112.4
RS-485…………………………………… 15312.5
………………………………… 15312.6
…………………………………….. 15412.7
()………………………………. 15413 AS-
…………………………………………………………………
15513.1 IEC 380…500 ~ … 15513.2
………………………………… 15613.3
…………………………………….. 15613.4
()………………………………. 15613.5 URM
…………………………………………………………….
156……………………………………………………………………….
157……………………………………………………………………
158 -
MOVIMOT MM03C — MM3XC 5
1
1
!
—
» DR/DT/DV,
CT/CV»
MOVIMOT
. «
MOVIMOT».
SEW-EURODRIVE —
!
MOVIMOT .
73/23/EEC.
MOVIMOT
!
.
!
(
) , ,
89/336/EEC,
89/392/EEC
( EN 60204).
! . : .
! . : .
. : .
. : .
.
-
1
6 MOVIMOT MM03C — MM3XC
, :
;
, , , , ,
. .;
,
EN50178 ;
, MOVIMOT
( )
.
:
;
;
;
;
.
!
-
MOVIMOT MM03C — MM3XC 7
2
2
.
.
, MOVIMOT
, —
,
( EN 60204, VBG 4, DIN-VDE 0100/0113/0160).
( EN 60204 EN 50178).
: MOVIMOT.
EN 50178
.
,
.
MOVIMOT
.
1 .
MOVIMOT ,
, . . MOVIMOT
.
, ,
.
.
.
,
MOVIMOT .
! :
MOVIMOT ( ) 60 C!
MOVIMOT
.
» MOVIMOT».
SEW-EURODRIVE
!
-
3
8 MOVIMOT MM03C — MM3XC
MOVIMOT ( )
3
3.1 MOVIMOT ( )
06496AXX
1. 2. ( . — 2)3. » — «4. MOVIMOT ( . — 2)5. 6. 7. X2 8. BW. (
)9. (X3). :BW. ( )10. L1, L2, L3 (X3) ( 2 x 4 2)11. 12. 13. 14. 15. f1 (
),MOVIMOT 16. f2 ()17. t1 ()18. DIP- S1 S2 ( . . » «)19. (
MOVIMOT, . . «»)1 2 3 4
5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
-
MOVIMOT MM03C — MM3XC 9
3 (MOVIMOT )
3.2 (MOVIMOT )
()
():
06491AXX
KA 77 DT 90L4 BMG/MM15/MLU
. 1
1 .
MOVIMOT
. ()
,
2)
2
«MOVIMOT Geared Motors» («- MOVIMOT»).
2)
3009818304. 0001. 99
(2- )
(4- )
(10- )
SEW-EURODRIVE
TypNr.KW
kg 73
50Hz
60Hz
r/min
Bremse
KA77 DT90L4/BMG/MM15/MLU3009818304. 0001. 991,5 / 50 HZ
V 380-500V 380-500
22/1400V 230Ma 665
IEC 34B30,99
3,503,5054 F
64,75
Kl
:1
Schmierstoff
Bruchsal / Germany3 ~IM
cosAAIPGleichrichteri
Nm 20Nm
Made in Germany 184103 3.14
-
3
10 MOVIMOT MM03C — MM3XC
(MOVIMOT )
—
()
—
[1] MOVIMOT
[2], [3] [4] ,
[5].
05605AXX
MM 15 C 503 00
(00 = )
(3 = 3-)
(50 = 380…500 ~)
C
(15 = 1,5 )
MOVIMOT
50862AXX
[1]
[2]
[3] [4][5]
-
MOVIMOT MM03C — MM3XC 11
3 (MOVIMOT )
—
P2.A
MOVIMOT
:
52232AXX
MM22C-503-00/0/P22A/REZA/ALA4
21 = 122 = 2
0 = 1 =
MOVIMOT
-
3
12 MOVIMOT MM03C — MM3XC
MOVIMOT ( AS-)
3.3 MOVIMOT ( AS-)
06413AXX
1. 2. ( . — 1)3. 4. » — «5. MOVIMOT ( . — 1)6. S5 ( 24 , . . »
«)7. X2 8. (X3). :BW. ( ).9. L1, L2, L3 (X3) ( 2 x 4 2)10. 11. 12. 13. (. . «»)14.
AS-i15. 16. 17. f1 ( ),MOVIMOT 18. f2 ()19. t1 ()20. DIP- S3 S4 ( . . » «)21. (
MOVIMOT, . . «»)32 4
117 8 9 13
1
10
5
15 16 17 18 19 20 216 1412
-
MOVIMOT MM03C — MM3XC 13
3 (MOVIMOT AS-)
3.4 (MOVIMOT AS-)
()
():
06488AXX
KA 77 DT 90L4 BMG/MM15/RJ1A/AND3/AZSK
AS-i
MOVIMOT
. ()
,
1)
1
«MOVIMOT Geared Motors» («- MOVIMOT»).
2)
3009818304. 0001. 99
(2- )
(4- )
(10- )
SEW-EURODRIVE
TypNr.KW
kg 73
50Hz
60Hz
r/min
Bremse
3009818304. 0001. 991,5 / 50 HZ
V 380-500V 380-500
22/1400V 230Ma 665
IEC 34B30,99
3,503,5054 F
64,75
Kl
:1
Schmierstoff
Bruchsal / Germany
3 ~IM
cosAAIPGleichrichteri
Nm 20Nm
Made in Germany 184103 3.14
KA77 DT90L4/BMG/MM15/RJ1A/AND3/AZSK
-
3
14 MOVIMOT MM03C — MM3XC
(MOVIMOT AS-)
—
()
—
[1] MOVIMOT
[2], [3] [4] ,
[5].
52118AXX
MM 15 C 503 30
(30 = AS-)
(3 = 3-)
(50 = 380…500 ~)
C
(15 = 1,5 )
MOVIMOT
51967AXX
[2]
[3][5]
[4]
[1]
-
MOVIMOT MM03C — MM3XC 15
3 (MOVIMOT AS-)
—
P2.A
MOVIMOT
:
52233AXX
MM30C-503-30/0/P22A/REZA/AVSK/ALA4
21 = 122 = 2
0 = 1 =
MOVIMOT
-
4
16 MOVIMOT MM03C — MM3XC
— MOVIMOT
4
4.1 — MOVIMOT
MOVIMOT , :
;
( );
:
25 +40 C (
,
);
, , , , . .
MOVIMOT / MOVIMOT
, —
.
(
).
!
MOVIMOT
(
!)
.
!
,
, .
, ,
(
).
, .
,
.
( ).
,
.
.
MOVIMOT
.
.
.
DIN 748: k6 ISO
50 ; m6 ISO >
50 ;
( DIN 332, DR).
DIN 42948: j6 ISO
230 ; h6 ISO >
230 .
-
MOVIMOT MM03C — MM3XC 17
4
4.2
, MOVIMOT
.
( )
.
1. MOVIMOT,
!
1 !
2. [A] MOVIMOT [B].
3. ,
.
4. , .
5. [C] [D].
51819AXX
[D]
[B]
[C]
[A]
-
4
18 MOVIMOT MM03C — MM3XC
6. [D] 180.
7. [D] [E]
[C].
8. .
9. MOVIMOT [B] [A].
51820AXX
51821AXX
180 [D]
[D]
[E]
[B]
[C]
[A]
-
MOVIMOT MM03C — MM3XC 19
4 MOVIMOT P2.A
4.3 MOVIMOT P2.A
MOVIMOT P2.A:
51772AXX
A B
MM03…MM15 65 140
MM22…MM3X 65 170
A
B
M6
M6
-
4
20 MOVIMOT MM03C — MM3XC
MLU..A / MLG..A / MLK11A
4.4 MLU..A / MLG..A / MLK11A
[2] MLU..A / MLG..A / MLK11A
2 [1]
[4]
[5] MLU..A / MLG..A / MLK11A
1. MOVIMOT .
2. MOVIMOT [5]
[4].
3. [4] MOVIMOT
[3].
4. [5] [2] 2 [1].
: ,
!
05625AXX
[1]
[2]
[3]
[4]
[5]
[1]
-
MOVIMOT MM03C — MM3XC 21
4 MBG11A
4.5 MBG11A
A: 4
B: 2
4.6 MWA21A
MWA21A (DIN EN 50022) :
50520AXX
a =
!
AB
2
M4
8 m
m
68 mm56 mm
4,3 mm
M4
M4 x 5 + a
M4 x 25
60 m
m8
8 m
m
A A
A A
B B
50519AXX
22,5
74
75
-
4
22 MOVIMOT MM03C — MM3XC
URM
4.7 URM
URM 2 , . .
. » «.
!
52207AXX
-
MOVIMOT MM03C — MM3XC 23
5
MOVIMOT
5 MOVIMOT
5.1
MOVIMOT
.
: I
(. ).
MOVIMOT (
).
(DIN 46228 1,
).
(. . «
MOVIMOT», F11/F12/F13). D, D0, NH
.
.
. —
( 300 ),
.
MOVIMOT > 3,5 .
/ MOVIMOT
AC-3 IEC 158.
( IT)
SEW —
.
.
1000
MOVIMOT 380…500
2000 4000 1
.
1000 —
(. . «
«).
2000
2.
3,
,
«-» «-» 2,5 .
, 2000
(
EN 50178).
3 x 500 ( 2000
) 6 100 3 x 380 (4000
).
1,0 2 4,0 2 (2 x 4,0 2) 0,25 2 1,0 2 (2 x 0,75 2)
AWG17 AWG10 (2 x AWG10) AWG22 AWG17 (2 x AWG18)
1 —
(, ).
-
5
24 MOVIMOT MM03C — MM3XC
MOVIMOT
24 =
MOVIMOT 24 =
, MLU..A / MLG..A.
(
)
(, /,
/, f1/f2).
.
RS-485
( ),
MLG..A, MBG11A, MWA21A MF../MQ…
: .
.
MOVIMOT
, .
UL
, 60 / 75 C.
MOVIMOT: 1,5 .
MOVIMOT
( TN TT), 5000 ~
500 ~ (MM03C-503…MM3XC-503).
35 /600 .
24 =
(U
= 30 =)
(I 8 ).
UL-
«-» 300 .
-
MOVIMOT MM03C — MM3XC 25
5 MOVIMOT
MOVIMOT
5.2 MOVIMOT
05614AXX
/ / :
f1/f2:
f1 f2
/ / RS-485 / :
.
. .
. .
.
[1] 24 = ( MLU../MLG..)[2] /[3] /[4] f1/f2[5] ( = )[6] BW.. (
MOVIMOT )M3~
L1L2L3PE
K11
F11/F12/F13
K1
RS
-485
13 14 15
L1
L2
L3
24V
R L f1/f2
K1a
K1b
RS
-R
S+
=+
—
BMG
MOVIMOT
RD
WH
BMG
MOVIMOT
[1]
[2]
[3]
[4]
[5]
24 VDC
BL
BW. [6]
RD
WH
BL
R L24V
R L24V
R L24V
f1/f2
R L24V
f1/f2
24V
R L
24V
R L
24V
R L
24V
R L
-
5
26 MOVIMOT MM03C — MM3XC
MOVIMOT
MOVIMOT
5.3 MOVIMOT
AVT1,
ASA3
AVT1 ASA3
().
:
MM…/ASA3
MM…/AVT1
MM…/ASA3/AVT1
AMA6
AMA6 ().
:
MM…/AMA6
52113AXX
1 2 3 4 5
6 7 8 9
1 2
4 3
MOVIMOT
L1 L2 L324V RS+ RS-
ASA3AVT1
10
52114AXX
MOVIMOT
AMA6
1
23
456
1
2
AC
3
45
6
24 V
RS+
RS-
L2
L1
L3
. ,
. . » MOVIMOT», «
/ / RS-485″.
-
MOVIMOT MM03C — MM3XC 27
5 MOVIMOT
MOVIMOT
5.4 MOVIMOT
—
MLU11A
MLU11A.
—
MLG11A
MLG11A.
05651AXX
13 14 15
L1
L2
L3
R L f1/f2
K1a
K1b
RS
-R
S+
L1
L2
24V
MOVIMOT
24V
YE
YE
RD
BU
13 14 15
L1
L2
L3
24V
R L f1/f2
K1a
K1b
RS
-R
S+
L1
L2
24V
MLU11A
MOVIMOT
RD
YE
BU
05652AXX
[1] (. . » MOVIMOT», » / / RS-485″)
RD
BU
OG
GN
YE
YE
13 14 15
L1
L2
L3
MOVIMOT
L1
L2
24V
RS
+
RS
—
MLG11A
24V
R L f1/f2
K1a
K1b
RS
-R
S+
[1]RD
GN
OG
BU
-
5
28 MOVIMOT MM03C — MM3XC
MOVIMOT
MOVIMOT
—
MBG11A
MBG11A.
—
MLK11A
MLK11A ( I/O-
AS-i-).
03183CXX
[1] (. . » MOVIMOT», » / / RS-485″)
[2]
MBG11A
24V
RS
+
RS
—
13 14 15
L1
L2
L3
24V
R L f1/f2
K1a
K1b
RS
-R
S+
MOVIMOT
24 VDC[2]
[1]
05118CXX
[1] AS-i[2] 2
4
21
3
13 14 15
L1
L2
L3
24V
R L f1/f2
K1a
K1b
RS
-R
S+
MLK11A
2 1
3 45
[2]
AS-i +
AS-i —
24V
DI20V
N.C.
N.C.
N.C.DI3
MOVIMOT[1]
WHBK/BU
BK/RD
BK/WHRD
BU
(DI0)(DO2)
(DO1)
(DO0)(DO3)
( )
RD
WH
BK
BU
-
MOVIMOT MM03C — MM3XC 29
5 MOVIMOT
MOVIMOT
—
MWA21A
MWA21A.
03184DXX
[1] (. . » MOVIMOT», » / / RS-485″)
[2] [3] 10 [A]
[B]
05622BXX
MWA21A1 24V2 24V34 R5 L6 10V7 +8 -9
1011 RS+12 RS-
24VDC
13 14 15
L1
L2
L3
24V
R L f1/f2
K1a
K1b
RS
-R
S+
MOVIMOT
[1]
[2][2]
[3]
6 10V7 +8 -9
10
6 10V7 +8 -9
10
MW
A21
A
MW
A21
A
[A] [B]
-
5
30 MOVIMOT MM03C — MM3XC
MOVIMOT
MOVIMOT
—
URM
URM.
—
MDG11A
MDG11A.
, MOVIMOT ,
24 .
MDG11A RS-485 MOVIMOT
.
,
MOVIMOT (= 0 [S1/1…S1/4 = OFF]).
RS-485.
52203AXX
M3~
13
RD
14
15 24
V
R L f1/f2
K1
a
K1
b
RS
—
RS
+
BMG
URM
13
14
15WH
BU
L1
L2
L3
MOVIMOT
RD
WH
BU
03404CXX
[1] . . «»
MDG11A
24V
RS
+
RS
—
13 14 15
L1
L2
L3
24V
R L f1/f2
K1a
K1b
RS
-R
S+
MOVIMOT
[1]
-
MOVIMOT MM03C — MM3XC 31
5 RS-485
MOVIMOT
5.5 RS-485
RS-485.
03177BRU
[1] (. . » MOVIMOT», » / / RS-485″)
[2] [3] MOVIMOT / RS-485
RS-485
RS-485
13 14 15
L1
L2
L3
24V
R L f1/f2
K1a
K1b
RS
-R
S+
MOVIMOT
24 VDC
[1]
[3]
[2][2]
-
5
32 MOVIMOT MM03C — MM3XC
MOVIMOT
MOVIMOT
5.6 MOVIMOT
P2.A ()
MOVIMOT
.
MOVIMOT:
A: MM../P2.A/RO.A/APG4
B: MM../P2.A/RE.A/ALA4
APG4
( ):
A1 A2 A3 A4
MOVIMOT APG4 APG4 APG4 APG4
/
ASB4 APG4 IS
0 593 231 9 0 593 076 6 0 186 741 5 0816 325 1 0816 326 X 0593
278 5 0593 755 8. . 34 . 34 . 35 . 35
52198AXX
[1]
A2
A3
ASB4
APG4
APG4
APG4
APG4
IS
A4
A1
[1]
APG4
-
MOVIMOT MM03C — MM3XC 33
5 MOVIMOT
MOVIMOT
ALA4
( ):
B1 B2
MOVIMOT ALA4 ALA4
/ ASB4
0 817 948 4 0 816 208 5
. . 36 . 36
52199AXX
[1]
B1 B2
ASB4[1]
ALA4ALA4
-
5
34 MOVIMOT MM03C — MM3XC
MOVIMOT
MOVIMOT
A
A1
0 593 231 9
A2
0 593 076 6
52073AXX
.
/
U1 / U1
V1 / V1
W1 / W1
13 / 13
14 / 14
15 / 15
TH / 1
TH / 2
PE ( ) — + ()
52074AXX
-
MOVIMOT MM03C — MM3XC 35
5 MOVIMOT
MOVIMOT
A3
0 186 741 5
A4
52075AXX
52076AXX
MOVIMOT,
MOVIMOT,
IS, DT71 DT90
0593 278 5
0816 325 1
IS, DV100
0593 755 8
0816 326 X
Auftr
agsn
umm
er:
Auftr
agsn
umm
er:
R 01/
00R 0
1/00
Laen
ge (m
):La
enge
(m):
593 2
78 5
593 2
78 5
-
5
36 MOVIMOT MM03C — MM3XC
MOVIMOT
MOVIMOT
B
B1
0 817 948 4
B2
0 816 208 5
52077AXX
.
/
U1 / U1
V1 / V1
W1 / W1
13 / 13
14 / 14
15 / 15
TH / 1
TH / 2
PE ( ) — + ()
52078AXX
-
MOVIMOT MM03C — MM3XC 37
6
MOVIMOT AS-
6 MOVIMOT AS-
6.1
MOVIMOT .
: I (. ).
MOVIMOT ( ).
(DIN 46228 1, ).
(. . » MOVIMOT», F11/F12/F13). D, D0, NH . .
. — ( 300 ), . MOVIMOT > 3,5 .
/ MOVIMOT AC-3 IEC 158.
( IT) SEW — . .
1000
MOVIMOT 380…500 2000 4000 1 .
1000 — (. . » «).
2000 2. 3, , «-» «-» 2,5 .
, 2000 ( EN 50178).
3 x 500 ( 2000 ) 6 100 3 x 380 (4000 ).
1,0 2 4,0 2 (2 x 4,0 2) 0,25 2 1,0 2 (2 x 0,75 2)
AWG17 AWG10 (2 x AWG10) AWG22 AWG17 (2 x AWG18)
1 —
(, ).
-
6
38 MOVIMOT MM03C — MM3XC
MOVIMOT AS-
MOVIMOT
, .
UL
, : 60 / 75 C.
MOVIMOT: 1,5 .
MOVIMOT
( TN TT), 5000 ~
500 ~ (MM03C-503…MM3XC-503).
35 /600 .
24 = —
(U = 30 =)
(I 8 ).
UL-
«-» 300 .
-
MOVIMOT MM03C — MM3XC 39
6 MOVIMOT AS-
MOVIMOT AS-
6.2 MOVIMOT AS-
A AVSK (1 M12):
A1 A2
MM../AVSK MM../AVSK
S5 0 1
24 AS-i- AUX-PWR( )
AS-i AS-i- AS-i- ( )
. . 42 . 42
52001AXX
[1]
AS-i (YE)
AUX-PWR
(BK)
A1
[1]
AS-i (YE)
[1]
A2
BK YE
MOVIMOT P2.A ().
-
6
40 MOVIMOT MM03C — MM3XC
MOVIMOT AS-
MOVIMOT AS-
B AZSK (3 M12):
B1 B2 B3
MM../RC.A/AZSK MM../RC.A/AZSK MM../RC.A/AZSK
S5 1 1 0
24 AUX-PWR
AUX-PWR ( )
AS-i-
AS-i
AS-i- AS-i- ( )
AS-i-
M12 M12 M12
. . 43 . 43 . 43
52002AXX
[1]
2 x DI
2 x DI
AS-i (YE)
AUX-PWR
(BK)
B1 B2
AS-i (YE)AUX-PWR (BK)
B3
AS-i (YE)
[1][1]
2 x DI
[1]
BK YE
MOVIMOT P2.A ().
-
MOVIMOT MM03C — MM3XC 41
6 MOVIMOT AS-
MOVIMOT AS-
C AND3/AZSK
(3 M12, 1 Han Q8/0):
C1 C2 C3
MM../RJ.A/AND3/AZSK MM../RJ.A/AND3/AZSK MM../RJ.A/AND3/AZSK
S5 1 1 0
24 AUX-PWR AUX-PWR ( )
AS-i-
AS-i
AS-i- AS-i- ( )
AS-i-
AND3 AND3 AND3
M12 M12 M12
. . 44 . 44 . 44
51761AXX
[1]
2 x DI
2 x DI
AS-i (YE)
AUX-PW
(BK)
2 x DI
[1]
C1 C2
AS-i (YE)AUX-PWR (BK)
C3
AS-i (YE)
[1] [1]
BK YE
MOVIMOT P2.A ().
-
6
42 MOVIMOT MM03C — MM3XC
MOVIMOT MM../AVSK ( A)
MOVIMOT AS-
6.3 MOVIMOT MM../AVSK ( A)
MM../AVSK:
51823AXX
[1] 24 = [2] AS-i «»[3] AS-i «+»[4] [5] DI2[6] DI3[7] BW.. (
MOVIMOT )[8] M12 ()M3~
L1L2L3PE
K11
F11/F12/F13
13 14 15
L1
L2
L3
24V
AS
-i —
AS
-i +
VO
VO
24D
I2D
I3
BMG
RD
WH
BMG
[1]
[2]
[3]
[4]
[5]
[6]
BL
BW. [7]
4
21
3
314
2
AS-i+
AS-i —
MM../AVSK
24 V
[8]RD
WH
BL
-
MOVIMOT MM03C — MM3XC 43
6 MOVIMOT MM../AZSK ( B)
MOVIMOT AS-
6.4 MOVIMOT MM../AZSK ( B)
MM../AZSK:
52061AXX
AZSK
[1] M12 (, ) 1 24 V 24 (AUX-PWR)
2 N. C.
3 0V AUX-PWR
4 N.C.
[2] M12 (, ) 1 AS-i + AS-i «+»
2 0 V AUX-PWR
3 AS-i — AS-i «»
4 24 V 24 (AUX-PWR)
[3] M12 (, ) 1 VO24 24
2 DI3 DI3
3 VO
4 DI2 DI2
M3~
L1L2L3PE
K11
F11/F12/F13
13 14 15
L1
L2
L3
BMG
RD
WH
BMG
BL
BW.
4
21
3
MM../AZSK
314
2
24V
4
21
3
4
21
3314
2
AS-i+
AS-i — 24 V
DI3VO24
314
2
DI2
[1] [2] [3]BK YE BK
VO
RD YE
WH BK
BL
-
6
44 MOVIMOT MM03C — MM3XC
MOVIMOT MM../AND3/AZSK ( C)
MOVIMOT AS-
6.5 MOVIMOT MM../AND3/AZSK ( C)
MM../AND3/
AZSK:
51940AXX
AZSK
[1] M12 (, )
1 24 V 24 (AUX-PWR)
2 N. C.
3 0V AUX-PWR
4 N.C.
[2] M12 (, )
1 AS-i + AS-i «+»
2 0 V AUX-PWR
3 AS-i — AS-i «»
4 24 V 24 (AUX-PWR)
[4] M12 (, )
1 VO24 24
2 DI3 DI3
3 VO
4 DI2 DI2
AND3
[3] AND3 ()
1 N.C. ( N)
2 L2 L2
3 N.C.
4 N.C.
5 N.C.
6 L3 L3
7 N.C.
8 L1 L1
PE
3
1 2
4
24V 0VASI+24V ASI-0V
0V
PE
N.C.
N.C.
L3
N.C.
N.C.
L2
L1
N.C.
DI3 DI224V PE
3
1 2
43
1 2
4 3
1 2
4
122 1
33 44
[1] [2]
[3] [4]
-
MOVIMOT MM03C — MM3XC 45
6 URM
MOVIMOT AS-
6.6 URM
URM.
52208AXX
M3~
13
RD
14
15
BMG
URM
13
14
15WH
BU
L1
L2
L3
MOVIMOT
24V
AS
-i —
AS
-i +
VO
VO
24D
I2D
I3
RD
WH
BU
-
6
46 MOVIMOT MM03C — MM3XC
MOVIMOT
MOVIMOT AS-
6.7 MOVIMOT
P2.A (,
) MOVIMOT
.
MOVIMOT:
A: MM../P2.A/RO.A/APG4
B: MM../P2.A/RE.A/ALA4
APG4
( ):
A1 A2 A3 A4
MOVIMOT APG4 APG4 APG4 APG4
/
ASB4 APG4 IS
0 593 231 9 0 593 076 6 0 186 741 5 0816 325 1 0816 326 X 0593
278 5 0593 755 8. . 48 . 48 . 49 . 49
51771AXX
[1]
A2
A3
ASB4
APG4
APG4
APG4
APG4
IS
A4
A1
[1]
APG4
-
MOVIMOT MM03C — MM3XC 47
6 MOVIMOT
MOVIMOT AS-
ALA4
( ):
B1 B2
MOVIMOT ALA4 ALA4
/ ASB4
0 817 948 4 0 816 208 5
. . 50 . 50
51853AXX
[1]
B1 B2
ASB4[1]
ALA4ALA4
-
6
48 MOVIMOT MM03C — MM3XC
MOVIMOT
MOVIMOT AS-
A
A1
0 593 231 9
A2
0 593 076 6
52073AXX
.
/
U1 / U1
V1 / V1
W1 / W1
13 / 13
14 / 14
15 / 15
TH / 1
TH / 2
PE ( ) — + ()
52074AXX
-
MOVIMOT MM03C — MM3XC 49
6 MOVIMOT
MOVIMOT AS-
A3
0 186 741 5
A4
52075AXX
52076AXX
MOVIMOT,
MOVIMOT,
IS, DT71 DT90
0593 278 5
0816 325 1
IS, DV100
0593 755 8
0816 326 X
Auftr
agsn
umm
er:
Auftr
agsn
umm
er:
R 01/
00R 0
1/00
Laen
ge (m
):La
enge
(m):
593 2
78 5
593 2
78 5
-
6
50 MOVIMOT MM03C — MM3XC
MOVIMOT
MOVIMOT AS-
B
B1
0 817 948 4
B2
0 816 208 5
52077AXX
.
/
U1 / U1
V1 / V1
W1 / W1
13 / 13
14 / 14
15 / 15
TH / 1
TH / 2
PE ( ) — + ()
52078AXX
-
MOVIMOT MM03C — MM3XC 51
7
MOVIMOT
7 MOVIMOT
7.1
!
/ MOVIMOT
.
1 .
,
.
.
— «/»
«/».
K11
2 .
7.2
f1
:
: f1 ( f1/f2 = «0»)
RS-485: f
f2
:
: f2 ( f1/f2 = «1»)
RS-485: f
t1
(
50 )
05066BXX
[1]
1 2 3 4 5 6 7 8 9 100
100f [Hz
[1]
]
2
75
25
50
65f1
f2
0 1 2 3 4 5 6 7 8 9 10
f2 [] 5 7 10 15 20 25 35 50 60 70 100
[]
2 5 7 10 12 15 20 25 30 35 40
34
56
78
t1
0 1 2 3 4 5 6 7 8 9 10
t1 [] 0,1 0,2 0,3 0,5 0,7 1 2 3 5 7 10
34
56
78
00
I
-
7
52 MOVIMOT MM03C — MM3XC
MOVIMOT
DIP—
S1 S2
DIP- S1:
DIP- S2:
50522AXX
S1 1 2 3 4 5
—
6
( )
7
8
—
RS-485
20 21 22 23
ON 1 1 1 1 .
(16, 8, 4 )
.
OFF 0 0 0 0 . 4 .
S2 1 2 3 4 5 6 7 8
20 21 22 23
ON
SEW DZ1
1
. U/f .1 1 1 1
OFF IEC . VFC . 0 0 0 0
00
I
-
MOVIMOT MM03C — MM3XC 53
7 DIP- S1
MOVIMOT
7.3 DIP- S1
DIP—
S1/1…S1/4
RS-485 MOVIMOT
MOVIMOT:
DIP—
S1/5
/
MOVIMOT (
P2.A )
.
, ,
TH ( ).
TH
(. «
«, . » —
«).
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
S1/1 X X X X X X X X
S1/2 X X X X X X X X
S1/3 X X X X X X X X
S1/4 X X X X X X X X
X = ON
= OFF
RS485
() 0
I/O- AS-i- (MLK11A) 0
(MLG.., MBG..) 1
(MF..) 1
(MQ..) 1…15
RS-485 1…15
00
I
-
7
54 MOVIMOT MM03C — MM3XC
DIP- S1
MOVIMOT
DIP—
S1/6
DIP- MOVIMOT
, .
.
, MOVIMOT
. ,
,
.
S1/6
.
.
.
S1/6 = «ON»
.
DIP—
S1/7
DIP- S1/7 = OFF MOVIMOT
4 .
DIP- S1/7 = ON MOVIMOT
16 ( )
.
DIP—
S1/8
(S1/8 = ON)
.
MOVIMOT
S1/6 = OFF S1/6 = ON
MM03 DT71D4 DR63L41) DR63L41)
MM05 DT80K4 DT71D4 DT71D4 DFR63L41)
1
MM07 DT80N4 DT80K4 DT80K4 DT71D4
MM11 DT90S4 DT80N4 DT80N4 DT80K4
MM15 DT90L4 DT90S4 DT90S4 DT80N4
MM22 DV100M4 DT90L4 DT90L4 DT90S4
MM30 DV100L4 DV100M4 DV100M4 DT90L4
MM3X DV100L4 DV100L4 DV100M4
00
I
-
MOVIMOT MM03C — MM3XC 55
7 DIP- S2
MOVIMOT
7.4 DIP- S2
DIP—
S2/1
IEC NEMA DIP- S2/1
OFF.
DZ 220/380 ,
60 ( ) DIP-
ON.
DIP—
S2/2
S2/2 = «ON»
, .
.
( = 0)
,
f1/f2 (. ).
:
—
R L f1/f2
«1»»0″
«0»»1″
«0» MOVIMOT, f1
«1»»0″
«0»»1″
«1» MOVIMOT, f2
«1»»0″
«1»»0″
«0»
«1» «1» «1»
«0» «0» «1»
52117AXX
PO = PI =
PO1 = PI1 = 1
PO2 = (%) PI2 =
PO3 = PI3 = 2
DO = DI =
MOVIMOT
PO1 PO2 PO3 DO
Master
-+
PI1 PI2 PI3 DI
PO
PI
00
I
-
7
56 MOVIMOT MM03C — MM3XC
DIP- S2
MOVIMOT
8
(. ).
f1/
f2:
—
,
f1/f2 8 .
(t : t = 100 : 300 ).
, .
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
«8»
«1 «=
«1 1 0» = ., . .:
—
8
/ —
«0» MOVIMOT
/ —
«1» MOVIMOT
/ —
«0»
/ —
«1»
/ —
«1» «0»
—
.
f1/f2
f1/f2 = «0» f1
f1/f2 = «1» f2
00
I
-
MOVIMOT MM03C — MM3XC 57
7 DIP- S2
MOVIMOT
DIP—
S2/3
DIP- S2/3 = OFF: VFC 4-
.
DIP- S2/3 = ON: U/f ()
.
DIP—
S2/4
(S2/4 = «ON»)
.
(S2/4 = «ON»)
1 ,
. MOVIMOT
(, , 08).
,
.
DIP—
S2/5…S2/8
DIP-
.
:
. 58.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
S2/5 X X X X X X X X
S2/6 X X X X X X X X
S2/7 X X X X X X X X
S2/8 X X X X X X X X
X = ON
= OFF
00
I
-
7
58 MOVIMOT MM03C — MM3XC
MM..C-503-00
MOVIMOT
7.5 MM..C-503-00
—
. .
MOVIMOT-
B
0 ,
X X
1 MOVIMOT
X X . 59MM..B-503-01
2 MOVIMOT ( )
X X . 59MM..B-503-02
3 MOVIMOT — ( f1/f2)
X X . 60MM..B-503-05
4 MOVIMOT
X . 62
5 MOVIMOT THX . 64
MM..B-503-14 ()
6 MOVIMOT 8
X X . 65MM..B-503-13
7 MOVIMOT /
X X . 66
8 MOVIMOT 0 X X . 68
9 MOVIMOT
X X . 69
10 MOVIMOT 0
X X . 71
11
X X. 71
12 MOVIMOT /- TH
X X. 72
13…15
00
I
-
MOVIMOT MM03C — MM3XC 59
7 MM..C-503-00
MOVIMOT
—
1
MOVIMOT
40 .
3
40 .
—
2
MOVIMOT (
)
f2 .
f2 ( ) (
RS-485) ,
:
f2: 5 ;
: 2 .
15 .
500 , (
44).
.
05592AXX
1 6 7 85432
ON
S2
6 7 85
t1
0 1 2 3 4 5 6 7 8 9 10
t1 [] 0,1 0,2 0,3 0,5 0,7 1 20 25 30 35 40
=
=
34
56
78
05596AXX
1 6 7 85432
ON
S2
6 7 853
45
67
8
f2
0 1 2 3 4 5 6 7 8 9 10
I
[%] I
90 95 100 105 110 115 120 130 140 150 160
00
I
-
7
60 MOVIMOT MM03C — MM3XC
MM..C-503-00
MOVIMOT
—
3
MOVIMOT (
f1/f2),
f2 .
f1/f2
, f2.
.
,
.
—
f2/
f1 f2
.
2 .
f1/f2
05598AXX
1 6 7 85432
ON
S2
6 7 85
34
56
78
f2
0 1 2 3 4 5 6 7 8 9 10
I
[%] I
60 70 80 90 100 110 120 130 140 150 160
03819AXX
f1/f2 = «0» 160 %
03820AXX
f1/f2 = «1» , f2. .
R L24V
f1/f2
R L24V
f1/f2
00
I
-
MOVIMOT MM03C — MM3XC 61
7 MM..C-503-00
MOVIMOT
.
50851AXX
[1]
[2] 3 ( f1/f2 = «1»)
50852AXX
[1]
[2] 3 ( f1/f2 = «1»)
200
160
100
500 50 100 f [Hz]
Imax / In [%]
[1]
[2]
200
160
100
500 50 10087
Imax / In [%]
f [Hz]
[1]
[2]
00
I
-
7
62 MOVIMOT MM03C — MM3XC
MM..C-503-00
MOVIMOT
—
4
MOVIMOT
f1 f2 t1 . MOVIMOT
, .
DIP- .
, DIP-, .
05599AXX
1 6 7 85432
ON
S2
6 7 85
MQ.. .
,
EEPROM.
SEW-EURODRIVE:
DeviceNet/CANopen;
InterBus;
PROFIBUS.
50853AXX
[1] [2]
RS-485
MOVIMOT
MQ..
UWS21A
P R O F I
B U S
PROCESS FIELD BUS
[1]
PC+MOVITOOLS
[2]
00
I
-
MOVIMOT MM03C — MM3XC 63
7 MM..C-503-00
MOVIMOT
MOVITOOLS
MOVITOOLS/Shell :
«Device Type» (» «) «MOVIMOT» [1];
«Execute program» (» «) «Shell» [2].
MOVITOOLS/Shell . .
DIP- 4 — . 24 DIP- , EEPROM.
0,5 , 3 .
, .
.
05595ARU
0,1…1…2000 []
8807 130 0,1 1 : 0,011 10 : 0,110 100 : 1100 2000 : 10
0,1…1…2000 []
8808 131
2…100 [] 8899 305 0,1
1) 2…100 [] 8900 306 0,1
60…160 [%] 8518 303 1
0…0,4…2 [] 8526 323 0,001
0…0,1…2 [] 8585 732 0,001
On/Off 8595 803
Yes/No 8594 802
0,1…1…10,0 [] 8558 501 0,1
0…2 [] 8749 731 0,001
2) 0…500 [/] 8527 324 0,2
.
1) : = 60 , = 10 %
= 6 2) 4
.
[1]
[2]
00
I
-
7
64 MOVIMOT MM03C — MM3XC
MM..C-503-00
MOVIMOT
—
5
MOVIMOT TH
MF.. MQ..:
5
84 ( ).
MOVIMOT (
P2.A
), TH
«0».
84
MOVIMOT.
, 84
.
MQ..:
MOVIMOT
4 (. . 62).
MF..:
f1 f2 t1 ,
:
05600AXX
1 6 7 85432
ON
S2
6 7 85
MOVIMOT (
P2.A ).
1 []
1 []
2 []
100 []
160 [%]
0,4 []
0,1 []
1 []
0 []
00
I
-
MOVIMOT MM03C — MM3XC 65
7 MM..C-503-00
MOVIMOT
84
84 » » ,
:
MOVIMOT
(DIP- S1/5 = ON).
24
TH, .
— TH (
).
.
—
6
MOVIMOT 8
S1/7
16 8 .
DIP- S1/7 = «ON»
8
4 .
:
52119AXX
P2.A:
52120AXX
24V
TH L R
TH
24V L R
TH
MOVIMOT 24 =,
.
05601AXX
1 6 7 85432
ON
S2
6 7 85
S1/7
6
S1/7
6
ON
16, 8, 4
8, 4
OFF 4 4
00
I
-
7
66 MOVIMOT MM03C — MM3XC
MM..C-503-00
MOVIMOT
—
7
MOVIMOT /
MOVIMOT ( )
0 .
,
,
.
MOVIMOT
.
05602AXX
1 6 7 85432
ON
S2
6 7 85
7 /
…
…MOVIMOT…
…MOVIMOT
…
(. . 75)
(. . 75)
00
I
-
MOVIMOT MM03C — MM3XC 67
7 MM..C-503-00
MOVIMOT
MOVIMOT:
13, 14 15 MOVIMOT
.
» «.
9 ,
MOVILINK.
MOVIMOT
9,
.
,
9.
(
).
:
13 15 MOVIMOT
(BW..), 14 .
,
(
» 7 9″, .
. 75 ).
» «.
9 ,
MOVILINK.
9, , MOVIMOT
.
,
9.
» «:
05319BXX
[1] / [2] [3] 9[4] : 1 = , 0 =
[1]
[2]
[3]
[4]
1
0
n
1
0
1
0
t
t
t
t
00
I
-
7
68 MOVIMOT MM03C — MM3XC
MM..C-503-00
MOVIMOT
MOVIMOT:
13, 14 15 MOVIMOT .
. .
().
:
13 15 MOVIMOT (BW..), 14 .
, ( » 7 9″, .. 75 ).
—
8
MOVIMOT 0
RS-485:
f2 0, , 0 . .
:
f2 0, , f2 0 . .
:
!
05603AXX
1 6 7 85432
ON
S2
6 7 853
45
67
8
f2
0 1 2 3 4 5 6 7 8 9 10
[]
0 5 7 10 12 15 20 25 30 35 40
[]
2 5 7 10 12 15 20 25 30 35 40
f2
0 1 2 3 4 5 6 7 8 9 10
f2 []
0 7 10 15 20 25 35 50 60 70 100
f2 []
5 7 10 15 20 25 35 50 60 70 100
34
56
78
00
I
-
MOVIMOT MM03C — MM3XC 69
7 MM..C-503-00
MOVIMOT
— 9
MOVIMOT
MOVIMOT :
9 , .
, VFC (DIP- S2/3 = OFF).
BGM (. . 75 ).
» «(. . 57).
2 . , 0,5 .
200 ( = 0 ), .
( ) — 150 ( = 100 ), , .
MOVIMOT (. . 70).
9:
05604AXX
1 6 7 85432
ON
S2
6 7 85
05613AXX
[1] [2]
[3] 1 = , 0 =
[4]
[5] ( )
[6] [7] [8] /-
[1]
t
t
t
t
150 ms200 ms
3 Hz
2 Hz
[2]
[3]
[5][4]
[6][7]
[8]
1
0
00
I
-
7
70 MOVIMOT MM03C — MM3XC
MM..C-503-00
MOVIMOT
.
13 15 MOVIMOT
(BW..), 14 .
,
(
» 7 9″, .
. 75 ).
» «.
9 ,
MOVILINK.
9, , MOVIMOT
.
,
9.
.
13 15 MOVIMOT
(BW..), 14 .
,
.
9 .
05648AXX
[1] / [2] [3] 9[4] : 1 = , 0 =
t
t
t
t
[1]
[2]
[3]
[4]
1
0
n
1
0
1
0
00
I
-
MOVIMOT MM03C — MM3XC 71
7 MM..C-503-00
MOVIMOT
—
10
MOVIMOT
(. ).
= 0 (. 8 . 68).
—
11
,
.
.
05606AXX
1 6 7 85432
ON
S2
6 7 85
50907AXX
[1] VFC[2]
M
5
[1]
[2]
10 15 f[Hz]
06378AXX
1 6 7 85432
ON
S2
6 7 85
00
I
-
7
72 MOVIMOT MM03C — MM3XC
MM..C-503-00
MOVIMOT
—
12
MOVIMOT / TH
,
, .
MOVIMOT ( P2.A
)
:
TH
;
.
«
TH»
.
84 » «.
,
:
MOVIMOT (DIP—
S1/5 = ON).
24
TH, .
— TH (
).
.
06379AXX
1 6 7 85432
ON
S2
6 7 85
:
52119AXX
P2.A:
52120AXX
24V
TH L R
TH
24V L R
TH
TH ,
DIP- S1/5 = OFF. MOVIMOT
.
00
I
-
MOVIMOT MM03C — MM3XC 73
7 MM..C-503-00
MOVIMOT
» «
MOVIMOT ( )
0 . ,
,
.
«
«
«
. 9 ,
.
MOVIMOT
9, (. .
MOVIMOT)
( ) .
(3 ),
9.
» «:
9
.
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
«9»
«1 «=
«1 1 0» = ., . .:
» «
06381AXX
[1] / [2] [3] 9[4] : 1 = , 0 =
[1]
[2]
[3]
[4]
1
0
n
1
0
1
0
t
t
t
t
00
I
-
7
74 MOVIMOT MM03C — MM3XC
MM..C-503-00
MOVIMOT
12MOVIMOT /
Z.7 / Z.8
13, 14 + 15 13 + 15…
……
…
…
(. . 75)
(. . 75)
00
I
-
MOVIMOT MM03C — MM3XC 75
7 MM..C-503-00
MOVIMOT
— 7, 9 12
K1 BGM.
: BGM:
(, 400 ).
7, 9 12 , . MOVIMOT.
, K1 . , BGM , .
52121AXX
[1] BGM ( ) [2] BW ( . . » «)[3] 24
=
[4] / [5] /
(. . » MOVIMOT», » / / RS-485″).
[6] f1/f2[7]
M3~
L1L2L3PE
K11
F11/F12/F13
K1
RS-485
13
RD
RD
BKBK
WHBU
BU
14 15L3
24V
R L f1/f2
K1a
K1b
RS-
RS+
=+
—
MOVIMOT
+~
~
[1]
[2]
[3]
[4] [5][6] [7]
BMG
BGM
MOVIMOT 24V DC
1314
15
L1 L2
_
UIN
UE
RD
BK
WH
BU
00
I
-
7
76 MOVIMOT MM03C — MM3XC
MM..C-503-00
MOVIMOT
BGM,
:
1. (
).
2. BGM 2 ,
( . 75).
3. . 75
( . . » «).
!
52122AXX
00
I
-
MOVIMOT MM03C — MM3XC 77
7 ( )
MOVIMOT
7.6 ( )
1. MOVIMOT, ! 1 !
2. MOVIMOT (. . «- «).
3. , DIP- S1/1S1/4 OFF (= 0).
4. f1 (, f1/f2 = 0, : . 50 ).
5. f2 ( ,
f1/f2 = «1»).
6. t1 (
50 ).
7. MOVIMOT .
8. f1 .
9. 24 = .
05062AXX
05066BXX
[1]
f2
0 1 2 3 4 5 6 7 8 9 10
f2 [] 5 7 10 15 20 25 35 50 60 70 100
1
ON
6 7 854321
ON
432
1 2 3 4 5 6 7 8 9 100
100f [Hz
[1]
]
2
75
25
50
65f1
34
56
78
f1 .
f1 f2 .
t1
0 1 2 3 4 5 6 7 8 9 10
t1 []
0,1 0,2 0,3 0,5 0,7 1 2 3 5 7 10
34
56
78
00
I
-
7
78 MOVIMOT MM03C — MM3XC
( )
MOVIMOT
—
0 =
1 =
X =
24 f1/f2 /
/
—
0 0 x x x . .
1 0 x x x . .
0 1 x x x
,
1 1 x 0 0
1 1 0 1 0 f1
1 1 0 0 1 f1
1 1 1 1 0 f2
1 1 1 0 1 f2
1 1 x 1 1
00
I
-
MOVIMOT MM03C — MM3XC 79
7 MBG11A MLG11A
MOVIMOT
7.7 MBG11A MLG11A
1. MOVIMOT,
!
1 !
2. MOVIMOT (. . «-
«).
3. DIP- S1/1 ( MOVIMOT) ON (= 1).
4. f2 f.
5. t1 (
50 ).
6. .
05064AXX
f2
0 1 2 3 4 5 6 7 8 9 10
f
[]2 5 7 10 12 15 20 25 30 35 40
t1
0 1 2 3 4 5 6 7 8 9 10
t1 [] 0,1 0,2 0,3 0,5 0,7 1 2 3 5 7 10
R L
.
.
.
.
.
, .
1
ON
6 7 854321
ON
2
34
56
78
34
56
78
24V
R L
24V
R L
24V
R L
24V
R L
00
I
-
7
80 MOVIMOT MM03C — MM3XC
MBG11A MLG11A
MOVIMOT
7. MOVIMOT
.
8. f1
.
9. f1
.
10. .
05066BXX
[1]
1 2 3 4 5 6 7 8 9 100
100f [Hz
[1]
]
2
75
25
50
65f1
00
I
-
MOVIMOT MM03C — MM3XC 81
7 MBG11A MLG11A
MOVIMOT
MBG11A MLG11A
, = .
, = .
f1. : «50» = 50 % , .: «0», f.
: :
: :
MOVIMOT : =
MOVIMOT
: MOVIMOT .
—
1.
2. .
—
1.
2. .
, 24 4 .
50
50
+ 0FF
0
0
00
I
-
7
82 MOVIMOT MM03C — MM3XC
MWA21A ( )
MOVIMOT
7.8 MWA21A ( )
1. MOVIMOT,
!
1 !
2. MOVIMOT (. . «-
«).
3. DIP- S1/1 ( MOVIMOT) ON (= 1).
4. f2 f.
5. t1 (
50 ).
6. .
05064AXX
f2
0 1 2 3 4 5 6 7 8 9 10
f
[]2 5 7 10 12 15 20 25 30 35 40
t1
0 1 2 3 4 5 6 7 8 9 10
t1 [] 0,1 0,2 0,3 0,5 0,7 1 2 3 5 7 10
R L
.
.
.
.
.
, .
1
ON
6 7 854321
ON
2
34
56
78
34
56
78
24V
R L
24V
R L
24V
R L
24V
R L
00
I
-
MOVIMOT MM03C — MM3XC 83
7 MWA21A( )
MOVIMOT
7. MOVIMOT
.
8. f1
.
9. f1
.
10. S1 S2 ,
( 7
MWA21A.
11. .
12. MOVIMOT, +24 4 (
) 5 ( ) MWA21A.
05066BXX
(1)
S1 S2
U- 0…10 OFF OFF
I- 0…20 ON OFF
I- 4…20 ON ON
U- 2…10 OFF ON
1 2 3 4 5 6 7 8 9 100
100f [Hz
[1]
]
2
75
25
50
65f1
00
I
-
7
84 MOVIMOT MM03C — MM3XC
MWA21A ( )
MOVIMOT
7 8
MOVIMOT f f.
:
05067BXX
[1] ( 10 ); : 5 [2]
6 10V7 +8 -9
10
6 10V7 +8 -9
10
MWA21A MWA21A
2 k[1] [2]
05068BXX
: [1] [2]
0 0,5 1 1,5 2 2,50 1 2 3 4 5
[V][mA]
f(2 Hz)
min
[Hz]5
4
3
1
0
[1]
[2]
0…10 V / 0…20 mA2…10 V / 4…20 mA
00
I
-
MOVIMOT MM03C — MM3XC 85
7 I/O- AS-i- MLK11A
MOVIMOT
7.9 I/O- AS-i- MLK11A
1. MOVIMOT, ! 1 !
2. MOVIMOT (. .» «).
3. , DIP- S1/1S1/4 OFF (= 0).
4. f1 (, f1/f2 = «0», : . 50 ).
5. f2 ( , f1/f2 = «1»).
6. t1 ( 50 ).
7. MOVIMOT .
8. f1 .
9. AS-i .
05062AXX
05066BXX
[1]
f2
0 1 2 3 4 5 6 7 8 9 10
f2 [] 5 7 10 15 20 25 35 50 60 70 100
1
ON
6 7 854321
ON
432
1 2 3 4 5 6 7 8 9 100
100f [Hz
[1]
]
2
75
25
50
65f1
34
56
78
f1 .
f1 f2 .
t1
0 1 2 3 4 5 6 7 8 9 10
t1 []
0,1 0,2 0,3 0,5 0,7 1 2 3 5 7 10
34
56
78
00
I
-
7
86 MOVIMOT MM03C — MM3XC
I/O- AS-i- MLK11A
MOVIMOT
AS-i-
MLK11A
4 ,
AS- AS-i- MLK11A:
MLK11A
AS-i-
4 ,
AS- MLK11A AS-i-:
/
D0 ( R) DO 0 /
D1 ( L) DO 1 /
D2 f1 / f2 ( f1 / f2) DO 2 /
D3 / ( «24 V») DO3 /
/
D0 ( K1) DI 0 /
D1 — —
D2 1 ( M12, 4) DI 2 /
D3 2 ( M12, 2) DI 3 /
05070BXX
[1] MOVIMOT [2] DI2[3] DI3[4] AS-i
[5] [6] [7] f2 [8] MOVIMOT
DI0DI2DI3AS-iPower
DO0DO1DO2DO3
[1][2][3][4]
[5][6][7][8]
00
I
-
MOVIMOT MM03C — MM3XC 87
7 I/O- AS-i- MLK11A
MOVIMOT
( ) AS-i
.
.
AS-i- :
AS-i-;
AS-i-;
;
(-
).
,
M12 MLK11A (. ).
: AS-i- (A),
(B).
05135AXX
52308AXX
[1] AS-i-
4
21
3
AS-i +
AS-i -N.C.
N.C.
[1]
A B
00
I
-
7
88 MOVIMOT MM03C — MM3XC
MOVIMOT
7.10
MOVIMOT P2.A :
, MOVIMOT .
: , !
TH.
RS-485 TH :
TH » » (. ).
().
, ( R L = «0»).
03636AXX
U1 V1 W1
W2 U2 V2
U1 V1 W1
W2 U2 V2
52257AXX
[A] [B] [C]
52253AXX
24
V
L R
24
V
L R
24
V
L R
TH TH TH
MOVIMOT MOVIMOT MOVIMOTA B C
TH
SPS
24V
K1a
K1bL R
MOVIMOT
00
I
-
MOVIMOT MM03C — MM3XC 89
7
MOVIMOT
DIP—
MOVIMOT DIP- S1/5
«ON» ( !):
, MOVIMOT
(BW1 BW2).
,
MOVIMOT .
—
MOVIMOT
—
—
MOVIMOT
:
PROFIBUS;
InterBus;
DeviceNet/CANopen;
AS-i.
S1 1 2 3 4 5
—
6
( )
7
8
—
RS-485
20 21 22 23
ON 1 1 1 1 .
(16, 8, 4 )
.
OFF 0 0 0 0 . 4 .
06487AXX
13
14
15
BW1 / BW2
MOVIMOT
00
I
-
8
90 MOVIMOT MM03C — MM3XC
MOVIMOT AS-
8 MOVIMOT AS-
8.1
!
/ MOVIMOT
.
1 .
,
.
.
K11
2 .
8.2
f1
f1:
f1 AS-i- » f1/f2″.
f2
f2:
f2 AS-i- » f1/f2″.
t1
(
50 )
05066BXX
[1]
1 2 3 4 5 6 7 8 9 100
100f [Hz
[1]
]
2
75
25
50
65f1
f2
0 1 2 3 4 5 6 7 8 9 10
f2 [] 5 7 10 15 20 25 35 50 60 70 100
34
56
78
t1
0 1 2 3 4 5 6 7 8 9 10
t1 [] 0,1 0,2 0,3 0,5 0,7 1 2 3 5 7 10
34
56
78
00
I
-
MOVIMOT MM03C — MM3XC 91
8
MOVIMOT AS-
DIP—
S3 S4
DIP- S3:
DIP- S4:
51858AXX
S3 1 2 3 4 5 6
( )
—
ON .
-(16, 8, 4 )
.
SEW
DZ1
1
.
OFF .-
4 .
IEC.
S4 1 2 3 4 5 6
20 21 22 23
ON U/f . 1 1 1 1
OFF VFC . 0 0 0 0
00
I
-
8
92 MOVIMOT MM03C — MM3XC
DIP- S3
MOVIMOT AS-
8.3 DIP- S3
DIP—
S3/1
/
MOVIMOT (
P2.A )
.
, ,
TH ( ).
DIP—
S3/2
DIP- MOVIMOT
, .
.
, MOVIMOT
. ,
,
.
S3/2
.
.
.
S3/2 = «ON»
.
DIP—
S3/3
DIP- S3/3 = OFF MOVIMOT
4 .
DIP- S3/3 = ON MOVIMOT
16 ( )
.
DIP—
S3/4
(S3/4 = ON)
.
MOVIMOT
S3/2 = OFF S3/2 = ON
MM03 DT71D4 DR63L41) DR63L41)
MM05 DT80K4 DT71D4 DT71D4 DFR63L41)
1
MM07 DT80N4 DT80K4 DT80K4 DT71D4
MM11 DT90S4 DT80N4 DT80N4 DT80K4
MM15 DT90L4 DT90S4 DT90S4 DT80N4
MM22 DV100M4 DT90L4 DT90L4 DT90S4
MM30 DV100L4 DV100M4 DV100M4 DT90L4
MM3X DV100L4 DV100L4 DV100M4
00
I
-
MOVIMOT MM03C — MM3XC 93
8 DIP- S3
MOVIMOT AS-
DIP—
S3/5
IEC NEMA DIP- S3/5
OFF,
ON.
DIP—
S3/6
S3/6 = «ON»
, .
.
AS-i- » f1/f2″
(. ).
AS-i- » f1/f2″:
—
,
AS-i- » f1/f2″.
(t : t = 100 : 300 ).
AS-i-
—
D0
(R)
D1
(L)
D2
(f1/f2)
«1»»0″
«0»»1″
«0» MOVIMOT, f1
«1»»0″
«0»»1″
«1» MOVIMOT, f2
«1»»0″
«1»»0″
«0»
«1» «1» «1»
«0» «0» «1»
D3 (/
) «1»!
AS-i-
D2 = «0» f1
D2 = «1» f2
00
I
-
8
94 MOVIMOT MM03C — MM3XC
DIP- S4
MOVIMOT AS-
8.4 DIP- S4
DIP—
S4/1
DIP- S4/1 = OFF: VFC 4-
.
DIP- S4/1 = ON: U/f ()
.
DIP—
S4/2
(S4/2 = «ON»)
.
(S4/2 = «ON»)
1 ,
. MOVIMOT
(, , 08).
,
.
DIP—
S4/3…S4/6
DIP-
.
:
. 58.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
S4/3 X X X X X X X X
S4/4 X X X X X X X X
S4/5 X X X X X X X X
S4/6 X X X X X X X X
X = ON
= OFF
00
I
-
MOVIMOT MM03C — MM3XC 95
8 MM..C-503-30
MOVIMOT AS-
8.5 MM..C-503-30
—
. .
0 ,
1 MOVIMOT
. 96
2 MOVIMOT ( )
. 96
3 MOVIMOT ( f1/f2)
. 97
4 MOVIMOT AS-i-
5 MOVIMOT AS-i-
6 MOVIMOT 8
. 99
7 MOVIMOT /
. 99
8 MOVIMOT 0 . 100
9 MOVIMOT AS-i-
10 MOVIMOT 0
. 101
11
. 101
12 MOVIMOT AS-i-
12…15
00
I
-
8
96 MOVIMOT MM03C — MM3XC
MM..C-503-30
MOVIMOT AS-
—
1
MOVIMOT
40 .
—
2
MOVIMOT (
)
f2 .
f2 ,
:
f2: 5 .
15 .
500 , (
44).
.
51859AXX
6 7 8521
ON
S4
4 5 63
t1
0 1 2 3 4 5 6 7 8 9 10
t1 []
0,1 0,2 0,3 0,5 0,7 1 20 25 30 35 40
=
=
34
56
78
51860AXX
6 7 8521
ON
S4
4 5 633
45
67
8
f2
0 1 2 3 4 5 6 7 8 9 10
I
[%] I
90 95 100 105 110 115 120 130 140 150 160
00
I
-
MOVIMOT MM03C — MM3XC 97
8 MM..C-503-30
MOVIMOT AS-
—
3
MOVIMOT ( AS-i-
» f1/f2″),
f2 .
AS-i- » f1/f2″
, f2.
.
,
.
—
f2/
(f1 f2) AS-i- » f1/f2″
.
AS-i-
«
f1/f2″
51861AXX
6 7 8521
ON
S4
4 5 63
34
56
78
f2
0 1 2 3 4 5 6 7 8 9 10
I
[%] I
60 70 80 90 100 110 120 130 140 150 160
AS-i- » f1/f2″ = 0 AS-i- » f1/f2″ = 1
= 160 % f2
00
I
-
8
98 MOVIMOT MM03C — MM3XC
MM..C-503-30
MOVIMOT AS-
.
50851AXX
[1] [2] 3
(AS-i- » f1/f2″ = «1»)
50852AXX
[1] [2] 3
(AS-i- » f1/f2″ = «1»)
200
160
100
500 50 100 f [Hz]
Imax / In [%]
[1]
[2]
200
160
100
500 50 10087
Imax / In [%]
f [Hz]
[1]
[2]
00
I
-
MOVIMOT MM03C — MM3XC 99
8 MM..C-503-30
MOVIMOT AS-
—
6
MOVIMOT 8
S3/3
16 8 .
DIP- S3/3 = «ON»
8
4 .
—
7
MOVIMOT
0 .
,
,
.
51863AXX
6 7 8521
ON
S4
4 5 63
S3/3
6
S3/3
6
ON
16, 8, 4
8, 4
OFF 4 4
51864AXX
6 7 8521
ON
S4
4 5 63
00
I
-
8
100 MOVIMOT MM03C — MM3XC
MM..C-503-30
MOVIMOT AS-
—
8
MOVIMOT 0
f2 0,
, f2 0 .
.
51866AXX
6 7 8521
ON
S4
4 5 63
f2
0 1 2 3 4 5 6 7 8 9 10
f2 []
0 7 10 15 20 25 35 50 60 70 100
f2 []
5 7 10 15 20 25 35 50 60 70 100
34
56
78
00
I
-
MOVIMOT MM03C — MM3XC 101
8 MM..C-503-30
MOVIMOT AS-
—
10
MOVIMOT
(.
).
= 0 (. 8 . 68).
—
11
,
.
—
.
51868AXX
6 7 8521
ON
S4
4 5 63
50907AXX
[1] VFC[2]
M
5
[1]
[2]
10 15 f[Hz]
52123AXX
6 7 8521
ON
S4
4 5 63
00
I
-
8
102 MOVIMOT MM03C — MM3XC
MOVIMOT AS-
8.6
1. MOVIMOT,
!
1 !
2. MOVIMOT S5 = 1
( ) AS-i-:
(. . 103),
(. AS-i-).
3. MOVIMOT (. . «-
«).
4. S5 24 (. . 104).
5. f1
( : . 50 ).
6. f2 ( ,
AS-i- » f1/f2″ = 1″).
7. t1 (
50 ).
8. MOVIMOT
.
9. f1 —
.
10. AS-i, 24 .
05066BXX
[1]
f2
0 1 2 3 4 5 6 7 8 9 10
f2 [] 5 7 10 15 20 25 35 50 60 70 100
1 2 3 4 5 6 7 8 9 100
100f [Hz
[1]
]
2
75
25
50
65f1
34
56
78
f1
.
f1 f2
.
t1
0 1 2 3 4 5 6 7 8 9 10
t1 []
0,1 0,2 0,3 0,5 0,7 1 2 3 5 7 10
34
56
78
00
I
-
MOVIMOT MM03C — MM3XC 103
8
MOVIMOT AS-
MOVIMOT AS-
= 0. ( 1 31)
:
AS-i
MOVIMOT. :
MOVIMOT 0.
MOVIMOT ( ).
(
MOVIMOT , AS-i-
).
AS-i- (
MOVIMOT AS-i- . ).
AS-i- :
AS-i-;
AS-i-;
;
. —
( AUX-PWR).
,
AS-i- MOVIMOT (. ).
: AS-i- (A),
(B).
52149AXX
[1] 2 4 .4
21
31:2:3:4:
AS-i +0V24 [1]AS-i -24V [1]
2 4 ,
.
S5 1!
S5
24 .
51894AXX
[1] AS-i-
A B
[1]
00
I
-
8
104 MOVIMOT MM03C — MM3XC
MOVIMOT AS-
24 —
S5
S5
. 24 .
51890AXX
[1] S5
24
S5 = 1
51941AXX
MOVIMOT AUX-PWR ( AS-i-)
06374AXX
S5 = 0
51942AXX
MOVIMOT AS-i
06375AXX
[1] 01
0
1
S524V ASi — ASi +
BK
YEYE
BK
1
S5
0 24V ASi — ASi +
YE
00
I
-
MOVIMOT MM03C — MM3XC 105
8
MOVIMOT AS-
AS-i-
MOVIMOT
4 ,
AS- AS-i- MOVIMOT:
MOVIMOT
AS-i-
4 ,
AS- MOVIMOT AS-i-:
.
f1. f2
.
f1 = 100 f1 = 50 :
D0 /
D1 /
D2 f2 / f1
D3 1 /
1 «0» «1» ( )
D0
D1 —
D2 1 ( DI 2 4 M12 ())
D3 2 ( DI 3 2 M12 ())
1 2
P3 P2 P1 P0 f1 = 100 f1 = 50
1 1 1 1 1,00 100 50
1 1 1 0 1,11 90 45
1 1 0 1 1,25 80 40
1 1 0 0 1,43 70 35
1 0 1 1 1,67 60 30
1 0 1 0 2,00 50 25
1 0 0 1 2,22 45 22,5
1 0 0 0 2,50 40 20
0 1 1 1 2,86 35 17,5
0 1 1 0 3,33 30 15
0 1 0 1 4,00 25 12,5
0 1 0 0 5,00 20 10
0 0 1 1 6,67 15 7,5
0 0 1 0 10,00 10 5
0 0 0 1 14,30 7 3,5
0 0 0 0 20,00 5 2,5
00
I
-
8
106 MOVIMOT MM03C — MM3XC
MOVITOOLS
MOVIMOT AS-
8.7 MOVITOOLS
—
MOVIMOT AS-
.
,
, MOVITOOLS ( 4.0
).
MOVIMOT (. ):
MWS21A (RS-232)
SEW-EURODRIVE
MWS21A (: 823 180X).
MWS21A:
;
Modular Jack 4/4 (RJ11);
RS-232;
— SOFTWARE-ROM 4 (MOVITOOLS).
51943AXX
[1] X50
[1]
51872AXX
[1] MOVIMOT !
UWS21A
PC + MOVITOOLS
RS-232 Modular
Jack 4/4 (RJ11)
MOVIMOT
[1]
00
I
-
MOVIMOT MM03C — MM3XC 107
8 MOVITOOLS
MOVIMOT AS-
MOVITOOLS
1. MOVIMOT,
!
1 !
2. MOVIMOT
.
3. MOVIMOT
.
4. Modular Jack 4/4 (RJ11) X50.
.
5. MOVIMOT
.
6. .
7. Manager MOVITOOLS.
:
8. «PC Interface» .
9. «Connect to» «Single Inverter (Peer-to-Peer)».
06458ARU
00
I
-
8
108 MOVIMOT MM03C — MM3XC
MOVITOOLS
MOVIMOT AS-
10. «Update», «Connected Inverters»
MOVIMOT.
, .
11. «Device Type» «MOVIMOT ASI».
12. «Shell»,
,
(Shell), .
13. «Monitor», «Manual mode» «Scaling factors»
.
«Monitor» . . «».
06459ARU
06460ARU
00
I
-
MOVIMOT MM03C — MM3XC 109
8 MOVITOOLS
MOVIMOT AS-
«Scaling
factors»
(«
«)
1,00 50,00. [Enter].
«Restore factory settings»
.
xml-
«File/Save settings as».
.
06363ARU
06479ARU
00
I
-
8
110 MOVIMOT MM03C — MM3XC
MOVITOOLS
MOVIMOT AS-
, , MOVIMOT,
«File/Open settings».
.
06480ARU
00
I
-
MOVIMOT MM03C — MM3XC 111
8 MOVITOOLS
MOVIMOT AS-
«Manual
mode» («
«)
(. ).
«Manual mode active»:
«Manual mode active» «Display values MOVIMOT».
, .
.
,
AS-i.
, .
06366ARU
06367ARU
00
I
-
8
112 MOVIMOT MM03C — MM3XC
MOVITOOLS
MOVIMOT AS-
,
. ( = ,
= ).
.
«Reset» («»)
, :
06369ARU
«CW/stop» («/») «CCW/stop» («/»)
«Reset/Controller enable» («/»).
«Reset/Controller enable» ,
( CTRL. INHIBIT).
00
I
-
MOVIMOT MM03C — MM3XC 113
8 MOVITOOLS
MOVIMOT AS-
«MOVIMOT
parameters»
( )
,
t1 .
f1 ,
.
«Display
values MOVIMOT»
.
06371ARU
06372ARU
00
I
-
8
114 MOVIMOT MM03C — MM3XC
MOVITOOLS
MOVIMOT AS-
—
, -.
«Manual mode» .
10 ,
AS-i.
«Reset/Controller enable»,
.
,
.
«Ignore».
— —
AS-i-.
«No enable».
06373ARU
00
I
-
MOVIMOT MM03C — MM3XC 115
8
MOVIMOT AS-
8.8
MOVIMOT P2.A
:
,
MOVIMOT .
: ,
!
TH.
TH DI2 (. ).
DI2 ().
DI2 , (
D0 D1 = «0»).
DIP-
MOVIMOT DIP- S3/1
«ON» ( !):
03636AXX
U1 V1 W1
W2 U2 V2
U1 V1 W1
W2 U2 V2
52254AXX
24V
DI2
TH
MOVIMOT
S3 1 2 3 4 5 6
( )
—
ON .
-(16, 8, 4 )
.
SEW
DZ1
1
.
OFF .-
4 .
IEC.
00
I
-
8
116 MOVIMOT MM03C — MM3XC
MOVIMOT AS-
, MOVIMOT
(BW1 BW2).
,
MOVIMOT .
52245AXX
13
14
15
BW1 / BW2
MOVIMOT
00
I
-
MOVIMOT MM03C — MM3XC 117
9
/
9 /
9.1
1. MOVIMOT (. . «-
«).
2. DIP- S1/1…S1/4 RS-485.
(MF…) SEW
«1».
3. f2 f.
4. ,
t1 ( 50 ).
5. .
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
S1/1 X X X X X X X X
S1/2 X X X X X X X X
S1/3 X X X X X X X X
S1/4 X X X X X X X X
X = ON
= OFF
f2
0 1 2 3 4 5 6 7 8 9 10
f
[]2 5 7 10 12 15 20 25 30 35 40
t1
0 1 2 3 4 5 6 7 8 9 10
t1 [] 0,1 0,2 0,3 0,5 0,7 1 2 3 5 7 10
R L
.
.
.
.
.
, .
34
56
78
34
56
78
24V
R L
24V
R L
24V
R L
24V
R L
00
I
-
9
118 MOVIMOT MM03C — MM3XC
/
6. MOVIMOT
.
7. f1
.
8. f1
.
9. .
05066BXX
[1]
1 2 3 4 5 6 7 8 9 100
100f [Hz
[1]
]
2
75
25
50
65f1
RS-485 .
. 122 .
.
:
PROFIBUS;
InterBus;
DeviceNet/CANopen;
AS-i.
00
I
-
MOVIMOT MM03C — MM3XC 119
9
/
9.2
.
MOVILINK SEW.
MOVIMOT :
2 (2 PD)
3 (3 PD)
2
MOVIMOT 2
() MOVIMOT
» » » [%]», MOVIMOT
» 1″ » «.
3
3
«», «
2″.
51334ARU
PO = PI =
PO1 = PI1 = 1
PO2 = (%) PI2 =
PO3 = PI3 = 2
MOVIMOT
PO1 PO2 PO3
PI1 PI2 PI3
PO
PI
00
I
-
9
120 MOVIMOT MM03C — MM3XC
/
( )
MOVIMOT. , MOVIMOT
, RS-485
MOVIMOT (DIP- S1/1…S1/4) ,
«0». MOVIMOT
:
PO1:
PO2: [%] ()
PO3:
, 0…2
«» 0…2 —
= 0006hex. , MOVIMOT
«» / «» «+24 V»
().
«» 2 «0».
SEW
0002hex. , 2 = «0», MOVIMOT
0 1.
,
6 =
6 = «1» ().
«0».
[%]
, f1.
: C000hex = -100 % ()
4000hex = +100 % ()
1 = 0,0061 %
: 80 % f, :
: 80 % / 0,0061 = 13115dec = CCC5hex
,
PO3 . ,
t1, , MOVIMOT
2 .
: 1 = 1
: 100…10000
: 2,0 = 2000 = 2000dec = 07D0hex
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
PO1:
( . ) = «0»»1 «=
= «0»
«1 1 0» = ., . .:
PO2: / 0,0061 %
: -80 % / 0,0061 % = — 13115 = CCC5hex
PO3: ( 3 )
0 50 (: 100…10000 ): 2,0 = 2000 = 07DOhex
00
I
-
MOVIMOT MM03C — MM3XC 121
9
/
MOVIMOT
. .
MOVIMOT :
PI1: 1
PI2:
PI3: 2
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
= «1»
PI1: 1
( 5 = «0») 0 =
2 = 4 =
( 5 = «1»)
= «1»PO- = «1»
/ = «1»
PI2:
16- x 0,1 % I : 0320hex = 800 x 0,1 % I = 80 % I
PI3: 2
( 3 )
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
= «1» = «1»PO- = «1»
/ = «1»
O1 () «1» = ,»0″ =
O2 ( )
I1 ()
I2 ()
I3 ( f2)
0
0
0
00
I
-
9
122 MOVIMOT MM03C — MM3XC
RS-485
/
9.3 RS-485
(, ) , MOVIMOT .
1 , 1 1 (
).
SEW MOVILINK
(. . » MOVILINK» )
9600 .
Idle = 3,44
SD1 = 1: MOVIMOT: 02hex
SD2 = 2: MOVIMOT : 1Dhex
ADR = 115
101115
254 =
255 =
TYP =
PDU =
BCC = Block Check Character ( ): » «
02754ARU
MOVIMOT
R TYP BCC
TYP Protocol Data Unit (PDU) BCC
Master
Idle
Idle Protocol Data Unit (PDU)SD2 AD
SD1 ADR
MOVIMOT
(
). ,
MOVIMOT ( -).
—
.
00
I
-
MOVIMOT MM03C — MM3XC 123
9 RS-485
/
(Idle)
MOVIMOT
3,44 , 02hex ( 1).
,
,
(. 6,88 ).
(ADR) MOVIMOT 0 15,
(254) (255). 0
( ,
).
, 0
PO- .
ADR = 101…115
MOVIMOT . MOVIMOT
RS-485 (, 1: ADR = 1, 2: ADR = 2).
ADR = 101 ( 1) ADR = 102 (
2).
.
25 !
—
(TYP)
MOVIMOT PDU (Protocol Data Unit),
.
—
«» MOVIMOT
(
). ,
(
-). » » .
«» — .
03hex 2 / [%] / 1 / 83hex 2
05hex 3 / [%] / / 1 / / 285hex 3
00
I
-
9
124 MOVIMOT MM03C — MM3XC
RS-485
/
BCC
(BCC)
.
XOR ( «»)
. BCC.
PDU 85hex (3 ).
XOR SD1…PO3low
BCC 13hex. BCC
.
.
SD1…PA3low
. BCC ,
,
. .
.
01660CRU
1
TYPADRSD1 PO1hi PO1lo PO2 hi PO2 lo PO3 hi PO3lo BCC
0 0 0 0 0 1 00
0 0 0 01 0 0 10
1 0 0 01 1 0 10
0 0 0 00 0 0 00
0 0 0 00 1 1 00
0 0 1 01 0 0 00
0 0 0 00 0 0 00
0 0 0 01 0 1 11
1 0 1 10 0 0 01
0 0 0 11 0 1 10
Par
ity
Sto
p
Sta
rt
SD1: 02hexADR: 01hexTYP: 85hex
BCC: 13hex
XOR
XOR
XOR
XOR
XOR
XOR
XOR
XOR
Idle 02hex 01hex 85hex 00hex 06hex 20hex 00hex 0Bhex B8hex
13hex(PO)
PO1hi : 00hexPO1lo : 06hexPO2hi: 20hexPO2lo: 00hexPO3 hi:
0BhexPO3lo: B8hex00
I
-
MOVIMOT MM03C — MM3XC 125
9 RS-485
/
MOVILINK
MOVILINK
.
a) (,
MOVIMOT)
1. ( 3,44 ,
25 ).
2. .
)
( + MOVIMOT)
1. 100 ,
.
2. BCC = BCC?
3. = 1Dhex?
4. = ?
5. PDU = PDU ?
6. : !
!
7. ( «a»).
: !
!
( «a»).
00
I
-
9
126 MOVIMOT MM03C — MM3XC
RS-485
/
MOVIMOT
PDU 85hex (3 PD, ).
RS-485 MOVIMOT
(PO). MOVIMOT
(PI).
RS-485-
MOVIMOT
PA1: 0006hex 1 =
PA2: 2000hex [%] = 50 % ( f1)
PA3: 0BB8hex = 3
MOVIMOT
RS-485-
PE1: 0406hex 1
PE2: 0300hex [% I]
PE3: 0607hex 2
. . 5.5 .
«3PD «
, . . —
MOVIMOT . ,
TYP = 05hex. MOVIMOT
( ),
MOVIMOT (
-).
1 f
f1
05079ARU
TYP
TYP
ADR
ADR
SD1
SD1
BCC
BCC
MOVIMOT
Idle 02hex 01hex 85hex 00hex 06hex 20hex 00hex 0Bhex B8hex
13hex1Dhex
01hex
85hex
04hex 07hex 03hex 00hex 06hex 07hex 98hex
RS485
PO1: 0006 = hex
PI1: 1
PO2: [%]2000 = 50 % fhex
PI2:
PO3: 0BB8 = 3 hex
PI3: 2
(PO)
(PI)
Idle
00
I
-
MOVIMOT MM03C — MM3XC 127
10 MOVIMOT
10
10.1 MOVIMOT
MOVIMOT (. ).
3-
.
50867AXX
[1] MOVIMOT
[1]
. 24 .
; 24 , .
, ( S2/2 = «ON»).
,
24 , .
/
—
, —
.
.
.
24 =. , ( 13 %).
2- —
, 07 .
, 08 ( S2/4=»ON»).
, 90 (, MM03 DT71D4 ).
, 17…24, 37
.
, 25, 94
EEPROM.
3-
, 01 .
, 11 .
4- —
, 84 . .
5- —
, 89 . .
6- —
, 06 .
-
10
128 MOVIMOT MM03C — MM3XC
MOVIMOT
/
— ( , )
A , RS+, RS MOVIMOT RS-485-. , «».
B . .
C () . >1 «». «».
, ( , )
. .
01:
() . . , 24 = MOVILINK
.
06: ( )
. , 24 = MOVILINK
.
07:
A .B /
/ .C /
/ (. . » «).
D .
, 24 = MOVILINK.
08:
. . , 24 = MOVILINK
.
11:
. . . .
, 24 = MOVILINK.
17…24, 37:
, 24 = MOVILINK.
25, 94: EEPROM
, 24 = MOVILINK.
84:
MOVIMOT DIP- S1/5 «ON».
«MOVIMOT » DIP- S1/6.
. . . . ,
» MOVIMOT». MOVIMOT 5,
( TH) .
, 24 = MOVILINK.
-
MOVIMOT MM03C — MM3XC 129
10 MOVIMOT
89:
. (. . «
«). SEW. ,
» ( ) MOVIMOT».
«MOVIMOT » DIP- S1/6.
, 24 = MOVILINK.
91: MOVIMOT ( )
MOVIMOT (RS-485).
, .
/
-
10
130 MOVIMOT MM03C — MM3XC
MOVIMOT
—
MDG11A
MOVIMOT
AS-.
, MOVIMOT ,
24 .
MOVIMOT.
MDG11A RS-485 MOVIMOT
.
,
MOVIMOT . DIP- S1/1…S1/4
OFF (= 0).
RS-485.
. . » «.
05240AXX
03125AXX
1
ON
6 7 854321
ON
432
-
MOVIMOT MM03C — MM3XC 131
10 MOVIMOT
:
, , , .
.
.
R L f1/f2
05623AXX
— , . . 24 MOVIMOT, RS-485 (, ).
c 0 , . . 24 , .
c 2 , . . 24 , R L .
c 4 , . . .
F01 .
F06 .
F07 .
F11 .
F84 .
F89 .
F90 (, MM03 DT71D4 ).
0…180 (0…180 %).
o10 .
o11 .
o20 ( , «», . ).
o21 .
R i10 R = «0».
i11 R = «1» = .
L i20 L = «0».
i21 L = «1» = .
f1/f2 i30 f1/f2 = «0» = f1.
i31 f1/f2 = «1» = f2.
c _
_ _ _ o 1 _ o 2 _ i 1 _ i 2 _ i 3 _
-
10
132 MOVIMOT MM03C — MM3XC
MOVIMOT AS-
10.2 MOVIMOT AS-
AS-
MOVIMOT (. ).
AS-
51870AXX
[1] AS-[2] MOVIMOT
[1]
[2]
. 24 AS-i.
. . 24 AS-i . .
. , 0.
-
MOVIMOT MM03C — MM3XC 133
10 MOVIMOT AS-
3-
.
. 24 .
; 24 , .
, ( S2/2 = «ON»).
,
24 , .
/
—
, —
.
.
.
24 =. , ( 13 %).
2-
, 07 .
, 08 ( S2/4=»ON»).
, 90 (, MM03 DT71D4 ).
, 17…24, 37
.
, 25, 94
EEPROM.
3-
, 01 .
, 11 .
4-
, 84 . .
5-
, 89 . .
6-
, 06 .
-
10
134 MOVIMOT MM03C — MM3XC
MOVIMOT AS-
/
, ( , )
. .
01:
() . . , 24 = MOVILINK
.
06: ( )
. , 24 = MOVILINK
.
07:
A .B /
/ .C /
/ (. . » «).
D .
, 24 = MOVILINK.
08:
. . , 24 = MOVILINK
.
11:
. . . .
, 24 = MOVILINK.
17…24, 37:
, 24 = MOVILINK.
25, 94: EEPROM
, 24 = MOVILINK.
84:
MOVIMOT DIP- S3/1 «ON».
«MOVIMOT » DIP- S3/2.
. . . . ,
» MOVIMOT».
, 24 = MOVILINK.
89:
. (. . «
«). SEW. ,
» ( ) MOVIMOT».
«MOVIMOT » DIP- S3/2.
, 24 = MOVILINK.
-
MOVIMOT MM03C — MM3XC 135
10 MOVIMOT AS-
AS-
—
MOVIMOT AS-
.
,
, MOVITOOLS ( 4.0
).
MOVIMOT (. ):
MWS21A (RS-232)
SEW
MWS21A (: 823 180X).
MWS21A:
;
Modular Jack 4/4 (RJ11);
RS-232;
— SOFTWARE-ROM 4 (MOVITOOLS).
51943AXX
[1] X50
[1]
51872AXX
[1] MOVIMOT !
UWS21A
PC + MOVITOOLS
RS-232 Modular
Jack 4/4 (RJ11)
MOVIMOT
[1]
-
10
136 MOVIMOT MM03C — MM3XC
MOVIMOT AS-
—
1. MOVIMOT,
!
1 !
2. MOVIMOT
.
3. MOVIMOT
.
4. Modular Jack 4/4 (RJ11) X50.
.
5. MOVIMOT
.
6. .
7. Manager MOVITOOLS.
:
8. «PC Interface» .
9. «Connect to» «Single Inverter (Peer-to-Peer)».
06458ARU
-
MOVIMOT MM03C — MM3XC 137
10 MOVIMOT AS-
10. «Update», «Connected Inverters»
MOVIMOT.
, .
11. «Device Type» «MOVIMOT ASI».
12. «Shell»,
,
(Shell), .
13. «Monitor», «Manual mode» «Scaling factors»
.
«Manual mode» «Scaling factors» . . . » «.
06459ARU
06460ARU
-
10
138 MOVIMOT MM03C — MM3XC
MOVIMOT AS-
«Monitor»
.
«AS-i communication»
AS-.
«AS-i control outputs» AS-i- «D0 (CW/stop)»,
«D1 (CCW/stop)», «D2 (Setpoint f1/f2)» «D3 (Reset/controller
inhibit)». AS-i-,, .
«AS-i parameters»
AS-i.
. AS-i,
, .
«MOVIMOT parameters»
, (
AS-i) t1
.
06460ARU
-
MOVIMOT MM03C — MM3XC 139
10 MOVIMOT AS-
«Display values MOVIMOT»
«Inverter status» .
,
, .
«Operating state».
«Malfunction/
Warning», «Operating state» .
«Process values»
«Process values»
( ), , ,
,
.
06461ARU
06462ARU
-
10
140 MOVIMOT MM03C — MM3XC
,
10.3 ,
— ,
SEW ( » «).
SEW
:
— [1];
[2];
[3];
( [4] [5]);
[6];
( ,
);
;
(, );
;
. .
06494AXX
SEW-EURODRIVE
TypNr.KW
kg 73
50Hz
60Hz
r/min
Bremse
KA77 DT90L4/BMG/MM15/MLU3009818304. 0001. 991,5 / 50 HZ
V 380-500V 380-500
22/1400V 230Ma 665
IEC 34B30,99
3,503,5054 F
64,75
Kl
:1
Schmierstoff
Bruchsal / Germany3 ~IM
cosAAIPGleichrichteri
Nm 20Nm
Made in Germany 184103 3.14
[1]
[4][3]
[2]
[6]
[5]
-
MOVIMOT MM03C — MM3XC 141
11
11
11.1
!
! : !
/
: 2-4 1
1 .
/
.
( , , , / , ).
.
10 000
( / ).
.
( )
— .
-
11
142 MOVIMOT MM03C — MM3XC
/
11.2 /
02575AXX
1 2 3 4 5
( )
6 7 8 9 10 Nilos
11 12 13 14
, —
15
16 V-
17 18 19 20
12
3
4
5 67
9
10
1112
8
13
14
17
18
1920
16
15
-
MOVIMOT MM03C — MM3XC 143
11 /
1. : MOVIMOT,
.
2. , NV16 / NV26.