![]()
S
MICROMASTER 440
 Руководство по эксплуатации издание А1
Руководство по эксплуатации издание А1 
Документация пользователя
Руководство пользователя преобразователей MICROMASTER 440
ВНИМАНИЕ
В настоящее время не все преобразователи имеют сертификат соответствия стандартам UL.
Получение сертификата UL и соответствующей маркировки обусловлено проведением испытаний.
Для изделий, внесенных в перечень соответствующих стандартам UL присваивается следующая маркировка:
Дополнительная информация доступна в Internet: http://www.siemens.de/micromaster
Качество программного обеспечения и обучения фирмы Siemens соответствует DIN ISO 9001, Рег. номер 2160-01
Размножение, передача или использование этой инструкции или ее содержания допускается только с письменного разрешения. В противном случае возмещается ущерб. Siemens оставляет за собой все права, включая возникающие при выдаче патентов или регистрации товарных образцов или конструкций.
© Siemens AG 2001. Все права зарегистрированы.
MICROMASTER ® — зарегистрированный товарный знак фирмы Siemens.
В случае необходимости в распоряжении имеются другие функции, неописанные в настоящем документе. Этот факт не обусловливает обязанность предоставлять такие функции в новых преобразователях или при обслуживании.
Соответствие содержания этого документа с описаниями аппаратного и программного обеспечения проверено. Тем не менее, возможны отклонения; гарантии полного соответствия не предоставляется. Содержащаяся в этом документе информация регулярно пересматривается и при необходимости изменяется в следующих изданиях. Предложения по улучшению содержания документа будут приняты с благодарностью.
Документация Siemens печатается на бумаге, не содержащей хлора, получаемой из контролируемых лесопосадок. Печать и переплет проводятся без растворителей.
Документация может изменяться без предварительного уведомления.
Заказной номер: 6SE6400-5СA00-0ВP0
Напечатано в России
Siemens-Aktiengesellschaft.
2

Руководство пользователя преобразователей MICROMASTER 440
Предисловие
Документация пользователя
Предупреждение
Перед инсталляцией и вводом в эксплуатацию все без исключения требования безопасности и предупреждения и все, имеющиеся в преобразователях предупредительные знаки, должны быть тщательно изучены. Внимание! Предупредительные знаки должны быть читаемыми, а поврежденные и недостающие этикетки необходимо заменить.
Документация для MICROMASTER состоит из трех частей:
•Краткие сведения
Краткие сведения изложены так, что их пользователю обеспечивается быстрый доступ ко всем базовым сведениям, которые необходимы для установки и на-
ладки MICROMASTER 440 в работе.
•Руководство по эксплуатации
Руководство по эксплуатации дает конкретную информацию для установки и эксплуатации MICROMASTER 440. Руководство по эксплуатации предоставляет описания параметров для специфических функций MICROMASTER 440, необходимых пользователю.
•Справочник
Справочник содержит подробные сведения о преобразователях MICROMASTER 440 по всем технических темам.
Относительно дальнейшей информации о публикациях по теме MICROMASTER 440 и сведений о прочих новостях в области MICROMASTER, пожалуйста, свяжитесь с региональным бюро Siemens или посетите нас в интернете:
http://www.siemens.de/micromaster
3

Руководство пользователя преобразователей MICROMASTER 440
MICROMASTER 440
Руководство по эксплуатации
Документация пользователя
Применимо для преобразователей типа
MICROMASTER 440
(версия 04.2001)
Издание A1
Обзор 1
Монтаж, инсталляция 2
Ввод в эксплуатацию 3
Применение 4
Системные параметры 5
Неисправности 6
Технические данные 7
Дополнительные данные 8
|
Приложения |
A |
|
B |
|
|
C |
|
|
D |
|
|
E |
|
|
F |
|
|
G |
|
|
H |
|
|
I |
|
|
J |
|
|
K |
4
Руководство пользователя преобразователей MICROMASTER 440
Определения понятий и предупреждения
Опасность
Надпись «Опасность» в этом документе и на предупредительных знаках в преобразователе означает, что пренебрежение мерами предосторожности может вызвать смерть, тяжелые телесные повреждения или нанести значительный материальный ущерб.
Предупреждение
Надпись «Предупреждение» в этом документе и на предупредительных знаках в преобразователе означает, что пренебрежение мерами предосторожности может вызвать смерть, тяжелые телесные повреждения или нанести значительный материальный ущерб.
Предостережение
Надпись «Осторожно» в этом документе и на предупредительных знаках в преобразователе означает, что пренебрежение мерами предосторожности может вызвать легкие телесные повреждения или нанести материальный ущерб.
Указания
Надпись «Указания» в этом документе означает важную информацию о преобразователе или подчеркивает необходимость повышенного внимания к данной части документа.
Квалифицированный персонал
Понятие «Квалифицированный персонал» в данном руководстве по эксплуатации и на этикетках преобразователей указывает на лицо, которому доверены работы по подключению, монтажу, вводу в эксплуатацию и обслуживанию устройства и которое ознакомлено с техникой безопасного проведения работ.
Это лицо должно обладать следующими квалификационными навыками:
1.Быть обученным и правомочным включать, выключать, разблокировать электрические установки, заземлять и снабжать их предупредительными знаками в соответствии с установленными указаниями безопасности.
2.Быть обученным, соответственно, действующим правилам техники безопасности правильному применению средств защиты.
3.Быть обученным оказывать первую помощь пострадавшим.
Применение исключительно для указанных целей
Устройства могут применяться только для целей, упомянутых в руководстве и только в сочетании с устройствами и компонентами, которые рекомендованы и разрешены фирмой Siemens.
Контактный адрес
Если при чтении этого руководства возникают вопросы или трудности, свяжитесь, пожалуйста, с компетентным бюро Siemens по адресу, указанному в конце руководства.
5
Руководство пользователя преобразователей MICROMASTER 440
Инструкции по безопасности
Общие указания
Нижеследующие предупреждения, предписания и указания предусмотрены для безопасности пользователя, а также как вспомогательное средство для предотвращения повреждений изделия или составных частей присоединенных машин. В этом разделе изложены предупреждения, предписания и указания, установленные для работы с преобразователем MICROMASTER 440, класси-
фицированные как: общие, транспортировка и хранение, ввод в эксплуатацию, эксплуатация, ремонт, демонтаж и утилизация отходов. Специфические предупреждения, предписания и указания, которые дейст-
вительны для определенных видов деятельности, приводятся в начале каждой главы и повторяются или дополняются в пределах этих глав в особо важных местах.
Пожалуйста, тщательно изучите эти сведения, так как это обусловливает Вашу личную безопасность и долговечность работы преобразователей MICROMASTER 440 и подключенных к ним устройств.
Предупреждение
•Данное устройство находится под опасным напряжением и управляет механизмами с вращающимися механическими частями, которые являются источниками опасности. Пренебрежение к предупреждениям или неподчинение указанным в этом руководстве предписаниям может вызвать опасность для жизни, тяжелое телесное повреждение или принести серьезный материальный ущерб.
•Только соответствующий квалифицированный персонал может работать с этими устройствами и только после того, как ознакомится со всеми указаниями по безопасности, подключению, эксплуатации и указаниями по обслуживанию, которые изложены в этом руководстве. Успешная и безопасная эксплуатация устройства зависит от его правильного использования, подключения, обслуживания и ухода.
•Электрическое напряжение в преобразователе опасно. Конденсаторы в звене постоянного тока остаются еще заряженными в течение 5 минут после выключения напряжения питания. Открытие устройства до истечения 5 ми-
нут после выключения напряжения питания недопустимо.
Осторожно
•Необходимо предотвратить доступ детей и посторонних лиц к устройству!
•Устройство может использоваться только для указанных производителем целей. Недопустимые изменения и применение запасных частей и оснастки, не изготавливаемых или не рекомендуемых производителем устройства, могут стать причиной пожаров, поражений электрическим током или травм.
Указания
•Данное руководство по эксплуатации должно храниться вблизи от устройства в доступном месте и предоставляться всем пользователям.
•Если должны быть выполнены измерения или проверки на включенном под напряжение устройстве, то следует соблюдать положения безопасности согласно Safety Code VBG 4.0, в частности § 8 «Допустимые отклонения при работе в установках под напряжением» или Правилам Техники Безопасности для установок до 1000В. При этом должны применяться соответствующие вспомогательные средства.
•Перед подключением и вводом в эксплуатацию тщательно изучите эти защитные указания и предупреждения, а также все предупредительные этикетки и знаки, имеющиеся на устройстве. Предупредительные этикетки должны быть читаемыми, а недостающие или поврежденные, при необходимости, должны быть заменены.
6
Руководство пользователя преобразователей MICROMASTER 440
Транспортировка и хранение
Предупреждение
• Для правильной и безопасной эксплуатации устройства очень важными являются правильная транспортировка, складирование, монтаж и крепление, а также тщательное и своевременное обслуживание и уход.
Предостережение
•Преобразователь должен при транспортировке и складировании защищаться от механических ударов и вибраций. Необходимо также выполнять защиту от попадания воды (дождя) и воздействия недопустимых температур (см. таблицу на странице 121).
Ввод в эксплуатацию
Предупреждения
•Работы, проводимые с прибором или установкой неквалифицированным персоналом, или игнорирование предупреждений могут привести к тяжелым телесным повреждениям или большому материальному ущербу.
Работы с прибором или установкой должны вестись только подготовленным квалифицированным персоналом, обученным наладке, установке, вводу в эксплуатацию и обслуживанию изделия.
•Допустимы только постоянные присоединения к сети. Устройство должно быть заземлено (IEC 536, класс 1, NEC и другие специальные нормы).
•Если должны использоваться устройства защитного отключения по току утечки (FSI), то должен применяться УЗО типа B или С.
•Машины с питанием от 3-х фазной сети, которые оснащены фильтрами защиты от влияния на сеть (EMV-ФИЛЬТРАЦИЕЙ), не могут подсоединяться к сети через выключатель с защитой от замыкания на землю (см. DIN VDE 0160,
часть 5.5.2. и EN50178 раздел 5.2.11.1).
•Следующие клеммы находятся под опасными напряжениями, даже если преобразователь не работает:
—Клеммы источника питания L/L1, N/L2, L3,
—Клеммы двигателя U, V, W, DC+/В+, DC-, В- и DC/R+.
—Это оборудование не должно использоваться, как устройства ЭКСТРЕН НОЙ ОСТАНОВКИ процесса ( см. EN6024, 9.2.5.4 )
Предостережение
Присоединение проводов сети, двигателя и системы управления к преобразователю должно производиться согласно рисункам 2-4 на странице 24, чтобы снизить индуктивные и емкостные помехи, влияющие на правильное функционирование преобразователя.
7

Руководство пользователя преобразователей MICROMASTER 440
Обслуживание
Предупреждения
•Преобразователь MICROMASTER работает с высокими напряжениями.
•При работе электрических устройств в определенных частях преобразователя неизбежно возникают опасные напряжения.
•Устройства экстренной остановки согласно EN 60204 IEC 204 (VDE 0113) должны оставаться дееспособным во всех режимах работы устройства. Возврат устройства экстренной остановки в исходное положение не должно приводить к неконтролируемому или нерегламентируемому повторному включению.
•В случаях, в которых короткие замыкания в устройстве управления приводят к значительному материальному ущербу или к тяжелым телесным повреждениям (то есть потенциально опасных коротких замыканий), должны предусматриваться дополнительные мероприятия или устройства, для того, чтобы гарантировать или обеспечивать принудительно безопасную работу, даже, если короткое замыкание произошло (например, независимые концевые выключатели, механические блокировки, и т.д.).
•Определенные параметры настройки могут вызывать повторный запуск преобразователя после пропадания напряжения питания.
•Устройство может обеспечивать внутреннюю защиту от перегрузки электродвигателя согласно стандарту UL508C, Раздел 42. См. P0610 (уровень
3)и P0335, по умолчанию защита по I2t включена. Защита от перегрузки электродвигателя может также осуществляться при помощи внешнего PTC терморезистора, подключаемого на соответствующий вход (по умолчанию P0601 отключен).
•Устройство предназначено для применения в цепях, которые могут пропускать симметричный ток (действующий) до 10 кА, при максимальном напряжении до 230/460 V, если ток можно отключить инерционными плавкими предохранителями (см. таблицу на странице 93).
•Устройство не может использоваться как устройство экстренной аварийной остановки (см. EN 60204, 9.2.5.4).
Ремонт
Предупреждение
•Ремонт устройства может производиться только в сервисных центрах и ремонтными мастерскими Сименс, получившими разрешения от Сименс, или квалифицированным персоналом, ознакомленным со всеми предупреждениями и способами обслуживания, изложенными в данном руководстве.
•При необходимости поврежденные части или элементы должны заменяться частями, указанными в перечне запасных частей.
•Перед открытием устройства необходимо отключить питание.
Демонтаж и утилизация отходов
Указания
•Упаковка преобразователей может использоваться повторно. Пожалуйста, сохраняйте упаковку для дальнейшего применения или для обратной отправки производителю.
•Легко разбираемые винтовые и защелкивающиеся соединения делают возможным разборку устройства на отдельные части. Эти части могут быть переработаны. Пожалуйста, утилизируйте отходы в соответствии с местными нормами или отсылайте назад производителю.
8
Руководство пользователя преобразователей MICROMASTER 440
Содержание
|
1 |
Обзор |
11 |
|
1.1 |
MICROMASTER 440 |
12 |
|
1.2 |
Примечания |
12 |
|
2 |
Установка |
14 |
|
2.1 |
Общие замечания |
15 |
|
2.2 |
Условия работы |
16 |
|
2.3 |
Механический монтаж |
17 |
|
2.4 |
Электрические подключения |
19 |
|
3 |
Ввод в эксплуатацию |
25 |
|
3.1 |
Блок-схема MICROMASTER 440 |
27 |
|
3.2 |
Способы обслуживания преобразователя |
28 |
|
4 |
Применения MICROMASTER 440 |
38 |
|
4.1 |
Задание частоты ( P1000 ) |
39 |
|
4.2 |
Источники команд (P0700) |
39 |
|
4.3 |
Функции выключения и торможения |
40 |
|
4.4 |
Виды управления (P1300) |
41 |
|
4.5 |
Ошибки и предупреждения |
41 |
|
5. |
Системные параметры |
43 |
|
5.1 |
Обзор системных параметров MICROMASTER |
45 |
|
5.2 |
Введение в системные параметры MICROMASTER |
43 |
|
5.3 |
Системные параметры и определения |
50 |
|
6. |
Неисправности |
110 |
|
6.1 |
Устранение ошибок с помощью статусной панели |
111 |
|
6.2 |
Устранение ошибок с помощью стандартного пульта оператора |
112 |
|
6.3 |
Коды ошибок преобразователя MICROMASTER 440 |
113 |
|
7. |
MICROMASTER 440 Технические данные |
118 |
|
8. |
Дополнительная информация |
124 |
|
8.1 |
Предоставляемые опции |
126 |
|
8.2 |
Электромагнитная совместимость (EMC) |
126 |
|
Приложения |
||
|
A |
— Замена операторской панели |
128 |
|
B |
— Съем крышек типоразмера A |
129 |
|
C |
-Снятие платы ввода/вывода |
130 |
|
D |
— Съем крышек типоразмера B и C |
131 |
|
E |
— Съем крышек типоразмера D и E |
132 |
|
F |
— Съем крышек типоразмера F |
133 |
|
G |
— Удаление Y- конденсатора на размере А |
134 |
|
H |
— Удаление Y- конденсатора на размерах B и C |
135 |
|
I |
— Удаление Y- конденсатора на размерах D и E |
136 |
|
J |
— Удаление Y- конденсатора на размере F |
137 |
|
К |
— Соответствия стандартам |
138 |
|
Список сокращений |
139 |
9
Руководство пользователя преобразователей MICROMASTER 440
Перечень иллюстраций
|
Рисунок 2-1 Габаритные размеры MICROMASTER 440 |
17 |
|
Рисунок 2-2 Присоединительные зажимы MICROMASTER 440 |
21 |
|
Рисунок 2-3 Подключение электродвигателя и сети |
22 |
|
Рисунок 2-4 Подключения с минимизацией эффекта излучения |
24 |
|
Рисунок 3-1 Блок-схема преобразователя MICROMASTER 440 |
27 |
|
Рисунок 3-2 Установка DIP переключателей |
28 |
|
Рисунок 3-3 Панели для преобразователей |
29 |
|
Рисунок 3-4 Базовое включение элементов управления |
30 |
|
Рисунок 3-5 Клавиши на базовой панели |
34 |
|
Рисунок 3-6 Изменение параметров на панели ВОР |
35 |
|
Рисунок 3-7 Пример шильдика на двигателе |
36 |
|
Перечень таблиц |
|
|
Таблица 3-1 предустановки для работы с дисплеем состояния |
29 |
|
Таблица 3-2 предустановки для обслуживания с помощью BOP |
33 |
|
Таблица 6-1 Состояния преобразователя, отображаемые светодиодами на SDP |
111 |
|
Таблица 6-2 Коды ошибок MICROMASTER 440 |
113 |
|
Таблица 6-3 Коды предупреждений MICROMASTER 440 |
115 |
|
Таблица 7-1 MICROMASTER 440 — Технические данные |
118 |
|
Таблица 7-2 Сечения проводников MICROMASTER 440 |
119 |
|
Таблица 7-3 Технические требования |
119 |
|
Таблица 8-1 Класс 1 — Общее промышленное применение |
126 |
|
Таблица 8-2 Класс 2 — Промышленное применение с фильтрами |
126 |
|
Таблица 8-3 |
Класс 3 — Фильтры для жилья, коммерческих применений и легкой промыш- |
|
|
ленности |
127 |
|
|
Таблица 8-4 |
Таблица совместимости |
127 |
10
Руководство пользователя преобразователей MICROMASTER 440
|
1 |
Обзор |
||
|
Эта глава содержит: |
|||
|
Описание наиболее важных свойств серии MICROMASTER 440. |
|||
|
1.1 |
MICROMASTER 440 …………………………………………………………….. |
12 |
|
|
1.2 |
Свойства ……………………………………………………………………….. |
12 |
11
Руководство пользователя преобразователей MICROMASTER 440
1.1MICROMASTER 440
Преобразователи MICROMASTER 440 являются серийными преобразователями для регулирования трехфазных электродвигателей. Отдельные поставляемые модели имеют диапазон мощностей 120 Вт при однофазном входе и до 75 кВт при трехфазном входе.
Преобразователи оснащены микропроцессорной системой управления и используют самые современные технологии с IGBT модулями — транзисторами (Insulated Gate Bipolar Transistor = биполярный транзистор с изолированным затвором). Вследствие этого преобразователи надежны и разнообразны. Оригинальный способ широтно-импульсной модуляции с выбором частоты коммутации дает возможность бесшумной работы электродвигателя. Обширные функции защиты обеспечивают эффективную защиту преобразователя и электродвигателя.
MICROMASTER 440 с заводскими установками является идеальным для широкой области простых применений регулирования скорости. MICROMASTER 440 может также использоваться для случаев с высокими требованиями к регулированию скорости электродвигателя за счет обширного списка параметров настроек.
MICROMASTER 440 может применяться как индивидуально, так и интегрироваться в системы автоматизации процесса.
1.2Свойства
Основные характеристики
•Легко устанавливать, параметрировать и пускать в эксплуатацию.
•Малое время отклика на сигналы управления.
•Соответствует международным нормам электромагнитной совместимости.
•Может работать с источниками энергии сравнимой мощности.
•Обширный набор параметров, которые дают возможность конфигурирования для широких областей применения.
•Простое присоединение проводов.
•Релейные выходы.
•Аналоговые выходы 0-20мА.
•6 изолированных переключаемых pnp/npn дискретных входов.
•2 аналоговых входа:
AIN 1 — 0-10В, 0-20мА или -10 до +10В
AIN 2 — 0-10В, 0-20мА
•Два аналоговых входа могут использоваться как 7-й и 8-й дискретные входы.
•Модульная конструкция для очень гибкой конфигурации.
•Высокая частота коммутации для бесшумной работы электродвигателя.
•Подробная информация о состоянии и встроенные функции сообщений.
•Внешние опции для обмена данными с компьютером, базовая панель обслуживания (BOP), расширенная панель оператора (AOP) и модули передачи данных по шине Profibus.
12
Руководство пользователя преобразователей MICROMASTER 440
Функциональные особенности
•Векторное регулирование без датчика скорости
•Регулирование потока (FCC) для улучшения динамических характеристик и повышения качества регулирования электродвигателя
•Мгновенное ограничение тока (FCL) для работы без отключения двигателя
•Встроенное динамическое торможение постоянным током
•Комбинированное торможение для улучшения возможностей торможения
•Времена ускорения и торможения с программируемым сглаживанием
•Использование замкнутого PID регулятора с автоподстройкой
•Встроенный прерыватель тормоза
•Выбираемая интенсивность разгона и остановки
•4-х точечная интенсивность сглаживания
•Многоточечная V/f характеристика, задаваемая пользователем
•Установленные параметры могут быть перенесены на другие устройства аналогичных процессов
Особенности защиты
•Защита от повышенного и пониженного напряжений
•Защита преобразователя от перегрева
•Защита от замыкания на землю
•Защита от короткого замыкания
•Защита от перегрева двигателя по потерям I2 t
•Защита двигателя по термисторам PTC/KTY
13
Руководство пользователя преобразователей MICROMASTER 440
2 Установка
Эта глава содержит:
•Общие данные по установке
•Габариты преобразователей
•Нормы монтажа для минимизации влияния электромагнитных помех
•Особенности электрической установки
|
2.1 |
Общие замечания…………………………………………………………………………….. |
15 |
2.2Условия работы……………………………………………………………………………….16
2.3Механический монтаж…………………………………………………..………..……….17
|
2.4 |
Электрические подключения……………………………………………………………… |
19 |
14

Руководство пользователя преобразователей MICROMASTER 440
Предупреждения
•Работы, выполняемые с прибором или установкой неквалифицированным персоналом, или пренебрежение предупреждениями могут привести к тяжелым телесным повреждениям или значительному материальному ущербу. Работы с прибором или устройством могут выполняться только специальным квалифицированным персоналом, обученным наладке, инсталляции, вводу в эксплуатацию и обслуживанию изделия.
•Допустимы только постоянно подключенные провода питания. Устройство должно быть заземлено (IEC 536, класс 1, NEC и прочие специальные нормы).
•Если используются устройства защитного отключения (FSI), то они должны соответствовать типу B или С.
•Машины с трехфазным питанием, оснащенные фильтрами электромагнитной совместимости, не могут присоединяться к сети защитным выключателем замыкания на землю (EN 50178, часть 5.2.11.1)
•Следующие зажимы могут даже при неработающем преобразователе находиться под опасным напряжением:
—зажимы присоединения сети L/L1, N/L2, L3,
—зажимы электродвигателя U, V, W, DC +/B, DC-, B- и DC/R+.
•После отключения устройства необходимо выждать 5 минут для разряда конденсаторов, прежде чем начинать монтажные работы.
•Преобразователи не должны использоваться как устройства ЭКСТРЕННОЙ ОСТАНОВКИ машин (см. EN 60204, 9.2.5.4).
•Минимальное сечение заземляющего провода должно быть не менее чем сечение линейного провода на вводе преобразователя.
Осторожно
Присоединение проводов сети, электродвигателя и управления в преобразователе должно выполняться, как показано на Рис. 2-4 на стр. 24, чтобы предотвратить индуктивные и емкостные помехи, которые могут нарушить правильность функционирования преобразователя.
2.1Общие замечания
Установка после хранения
По окончании периода хранения необходимо выполнить формование конден-
саторов преобразователя. Очень важно помнить, что время хранения ис-
числяется с момента выпуска преобразователя, а не с момента его по-
ставки. Пользуйтесь следующими правилами.
|
Время хра- |
Действия |
Время работы |
|
|
нения |
|||
|
1 год и менее |
Нет необходимости в формовке |
||
|
От 1 до 2 лет |
Подключить питание перед подачей команды на пуск |
1 час |
|
|
От 2 до 3 лет |
Использовать регулятор напряжения переменного тока |
||
|
Подать 25% напряжения на 30 минут |
|||
|
Поднять напряжение до 50% |
на 30 минут |
||
|
Поднять напряжение до 75% |
на 30 минут |
2 часа |
|
|
Поднять напряжение до 100% на 30 минут |
|||
|
Инвертор готов к принятию команд |
|||
|
3 года и |
Использовать регулятор напряжения переменного тока |
||
|
больше |
Подать 25% напряжения на 2 часа |
||
|
Поднять напряжение до 50% |
на 2 часа |
8 часов |
|
|
Поднять напряжение до 75% |
на 2 часа |
||
|
Поднять напряжение до 100% на 2 часа |
|||
|
Инвертор готов к принятию команд |
15
Руководство пользователя преобразователей MICROMASTER 440
2.2Условия работы
Температура наружного воздуха
Мин. рабочая температура = -10 °C
Макс. рабочая температура = 50 °C
Для габаритов от С до F при работе с переменным моментом для номинальной мощности рабочая температура снижается до 40 °C.
Примечание
При работе инвертора с нагрузкой переменного момента (вентиляторы или насосы) допускается увеличивать номинальную выходную мощность инвертора примерно на 1 габарит.
В этом случае необходимо снизить (программно) перегрузочную способность инвертора (относительно его номинальных данных).
Влажность
95 %, без конденсации.
Высота установки
Если преобразователь инсталлируется на высоте более 1.000 м, то необходимо снижать мощность нагрузки. ( См. Руководство MM440).
Удар
Не допускать падений преобразователя и ударов.
Вибрации
Не устанавливать преобразователь в зонах постоянных вибраций.
Электромагнитное излучение
Не устанавливать преобразователь вблизи от источников электромагнитного излучения.
Загрязнение атмосферного воздуха
Не устанавливать преобразователь в среде, содержащей загрязнения атмосферного воздуха, такие как пыль, агрессивные газы, и т.д.
Вода
Обратите внимание на то, чтобы преобразователь не подвергался воздействию влаги. Так нельзя устанавливать преобразователь под трубами, на которых возможно появление конденсата. Не устанавливать преобразователь в местах с повышенной влажностью и наличием конденсата.
Внимание!
Привод не должен монтироваться в горизонтальном положении!
Установка и охлаждение
Преобразователь монтируют вертикально, чтобы гарантировать оптимальное охлаждение силовых приборов. При горизонтальном монтаже может быть необходим дополнительный обдув. Допускается монтаж преобразователей бок о бок.
Обеспечьте, чтобы вентиляционные отверстия преобразователя не были прикрыты. Над и под преобразователем необходимо свободное от оборудования расстояние 100 мм.
16

Руководство пользователя преобразователей MICROMASTER 440
2.3Механический монтаж
Предупреждение
Преобразователь должен быть заземлен
• Чтобы гарантировать безопасную работу устройства, оно должно устанав-
|
ливаться и вводиться в эксплуатацию квалифицированным |
персоналом, |
|
при полном соблюдении изложенных в данном руководстве |
предупрежде- |
|
ний. |
•Обратите особое внимание на выполнения Общих и Региональных правил установки и безопасности при работе в электроустановках с опасными на-
пряжениями (например, EN 50178), а так же специальные положения относительно правильного применения инструментов и индивидуальных средств защиты.
•Сетевые клеммы, клеммы цепи постоянного тока и электродвигателя могут
оставаться под опасными напряжениями даже при неработающем преобразователе; перед проведением монтажных работ после выключения необходимо выждать 5 минут для разряда конденсаторов.
Размер А Размер В Размер С
Размер F
Размер Е
Размер D
Рисунок 2-1. Габаритные размеры MICROMASTER 440
17

Руководство пользователя преобразователей MICROMASTER 440
Таблица 2.1 Крепление преобразователей MICROMASTER 440
|
Типо- |
Установочные размеры |
Способ крепления (кре- |
Момент затяжки |
||
|
раз- |
пежные материалы) |
||||
|
мер |
Высота |
Ширина |
Глубина |
||
|
mm |
mm |
mm |
|||
|
A |
173 |
73 |
149 |
Болты 2хМ4 |
2,5 Nm |
|
Шайбы 2хМ4 |
Со смазкой |
||||
|
Гайки 2хМ4 |
|||||
|
На рейке 35мм |
|||||
|
B |
202 |
149 |
172 |
Болты 4хМ4 |
2,5 Nm |
|
Шайбы 4хМ4 |
Со смазкой |
||||
|
Гайки 4хМ4 |
|||||
|
C |
245 |
185 |
195 |
Болты 4хМ5 |
2,5 Nm |
|
Шайбы 4хМ5 |
Со смазкой |
||||
|
Гайки 4хМ5 |
|||||
|
D |
520 |
275 |
245 |
Болты 4хМ8 |
3,0 Nm |
|
Шайбы 4хМ8 |
Со смазкой |
||||
|
Гайки 4хМ8 |
|||||
|
E |
650 |
275 |
245 |
Болты 4хМ8 |
3,0 Nm |
|
Шайбы 4хМ8 |
Со смазкой |
||||
|
Гайки 4хМ8 |
|||||
|
F |
875 с |
350 |
300 |
Болты 4хМ8 |
3,0 Nm |
|
фильт- |
Шайбы 4хМ8 |
Со смазкой |
|||
|
ром |
Гайки 4хМ8 |
2.3.1. Монтаж преобразователей размера А на DIN рейку
Установка инвертора на рейку
1. Установите преобразователь верхними зажимами на рейку.
2. Прижмите нижнюю часть инвертора к рейке и нажмите до появления щелчка фиксатора.
Снятие инвертора с монтажной рейки
1.Установите отвертку в механизм защелки и оттяните
её.
2.Нажмите преобразователь вниз и снимите нижний край с монтажной рейки.
3.Снимите инвертор с монтажной рейки.
18

Руководство пользователя преобразователей MICROMASTER 440
2.4Электрические подключения
Предупреждение
ПРИБОР ДОЛЖЕН БЫТЬ ЗАЗЕМЛЕН.
•Чтобы гарантировать безопасную работу устройства, оно должно инсталлироваться и вводиться в эксплуатацию квалифицированным персоналом, при полном соблюдении изложенных в данном руководстве предупреждений.
•Обратите особое внимание на выполнения Общих и региональных правил инсталляции и безопасности при работе в установках с опасными напряжениями (например, EN 50178),а так же специальные положения относительно правильного применения инструментов и индивидуальных средств защиты.
•Сетевые клеммы, клеммы цепи постоянного тока и электродвигателя могут оставаться под опасными напряжениями даже при неработающем преобразователе; перед проведением монтажных работ после выключения необходимо выждать 5 минут для разряда конденсаторов.
•Преобразователи могут инсталлироваться рядом друг с другом. При инсталляции один над другим, тем не менее, должно соблюдаться расстояние
100мм (3,94″).
2.4.1Общие сведения
Предупреждение
Преобразователь должен быть всегда заземлен. Если преобразователь не-
правильно заземлен, могут возникнуть явно опасные состояния внутри преобразователя, которые в данном случае могут быть фатальными.
Работа в сетях с изолированной нейтралью (IT)
MICROMASTER работает в сетях с изолированной нейтралью и остается работоспособным, если входная фаза соединяется с землей. Если выходная фаза замыкается на землю, MICROMASTER выключается и показывает сообщение
F0001.
При работе в таких сетях должен удаляться ‘ Y ‘ — конденсатор внутри прибора. Способ демонтажа этого конденсатора описан в Приложениях G, H, I и J.
Работа с устройством защитного отключения
Если установлено устройство защитного отключения УЗО (обозначаемое как SFI, ELC или RCC), то преобразователи работают без нежелательного отключения при следующих условиях:
Применяется УЗО типа В или С.
Ток срабатывания УЗО составляет 300 mA. Нейтральный провод сети является заземленным. Каждое УЗО питает только один преобразователь.
Выходной кабель короче 50 м (экранированный) или соответственно 100 м (неэкранированный).
19

Руководство пользователя преобразователей MICROMASTER 440
Работа с длинными проводами (кабелями)
Осторожно
Провода управления, сети и электродвигателя должны прокладываться раздельно. Они не должны прокладываться в одних трубах или каналах. Провода, подключенные к преобразователю, ни в коем случае не должны подвергаться проверке изоляции высоким напряжением.
Все преобразователи работают при полном соблюдении данных при длинах экранированных проводов до 50 м или 100 м неэкранированных.
2.4.2Подключение сети и электродвигателя
Предупреждение
•Перед подключением или изменением подключения устройства отсоедините электрическое питание.
•Проверьте, сконфигурирован ли электродвигатель для правильного напряжения сети: однофазный или трехфазный преобразователь MICROMASTER для 230В не должен подключаться к трехфазной сети
400В.
•Если подключаются синхронные машины или параллельно подключаются несколько асинхронных электродвигателей, то преобразователь должен работать на характеристике напряжение/частота (P1300 = 0, 2 или 3).
Осторожно
После подключения проводов сети и электродвигателя к соответствующим клеммам проверьте, правильно ли закрыты все крышки. Только после этого подключайте снова напряжение питания!
Указание
•Проверьте, включены ли между сетью и преобразователем подходящий защитный выключатель/плавкие предохранители (см. таблицу на стр. 122).
•Применяйте только медные проводники, класс 1 60/75°C (для соблюдения норм UL). Момент затяжки клемм сети составляет 1,1 Нм (см. таблицу на стр. 122).
•Для зажима винтов сетевых клемм применяйте крестообразную отвертку 4- 5 мм.
Доступ к клеммам сети и электродвигателя
Последовательность действий для доступа к клеммам сети и электродвигателя преобразователя MICROMASTER 440 отображена в Приложениях B и C. Пожалуйста, обратите внимание на фотографии на нижней стороне обложки этого руководства, где показано подсоединение клемм сети и клемм управления.
После того, как откроете крышки и освободите доступ к клеммам, присоедините провода сети и электродвигателя так, как показано на следующей странице.
20

Руководство пользователя преобразователей MICROMASTER 440
Размеры D и Е
Размер F
Рисунок 2-2. MICROMASTER440 — клеммы силовых присоединений
21
Руководство пользователя преобразователей MICROMASTER 440
|
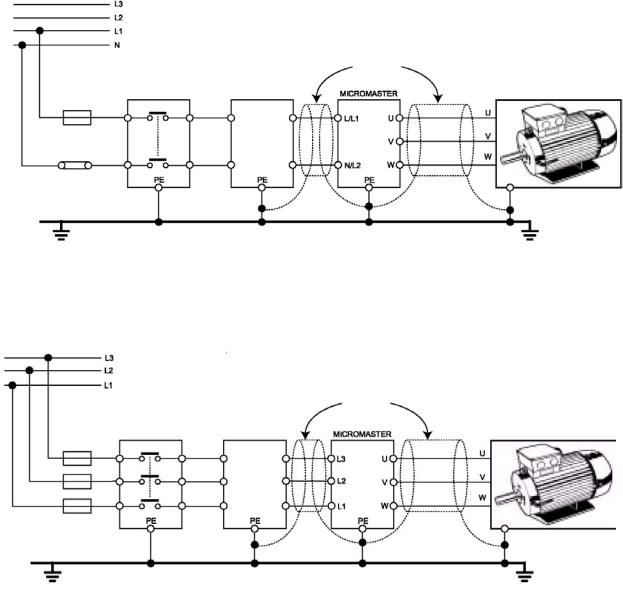
Питающие |
|
|
Входной фильтр |
кабели |
|
(опция) |
Двигатель |
FU
Однофазное питание преобразователя
|
Питающие |
||
|
Входной фильтр |
кабели |
|
|
Двигатель |
||
|
(опция) |
FU
Трехфазное питание преобразователя
Рисунок 2-3 Подключение питающей сети и двигателя
22

Руководство пользователя преобразователей MICROMASTER 440
2.4.3 Предотвращение влияния электромагнитных помех (EMI)
Преобразователь рассчитан для работы в промышленных условиях, где следует ожидать высокий уровень помех EMI. В общем, правильная установка гарантирует безопасную и безотказную работу. При возникновении затруднений следуйте, пожалуйста, нижеследующим указаниям.
Эффективные мероприятия
•Убедитесь, что все устройства в шкафу заземлены короткими заземляющими проводами с большим сечением, причем провода соединены с общей точкой или сборной шиной.
•Убедитесь, что все присоединенные к преобразователю устройства управления (например, PLC) присоединены к точке заземления или к общей точке короткими проводами с большим поперечным сечением, как и преобразователь.
•Обратный провод электродвигателей, управляемых преобразователем, присоедините непосредственно к зажиму заземляющего провода (PE) этого преобразователя.
•Плоские проводники являются предпочтительными, так как при более высоких частотах имеют меньшие сопротивления и потери.
•Подключайте зачищенные концы проводов и следите, чтобы неэкранированные провода были по возможности короткими.
•Как можно лучше разделяйте управляющие и силовые проводники, используйте для них разделенные кабельные каналы, пересекающиеся под углом 90 градусов.
•По возможности для соединения управляющих цепей используйте экранированные провода.
•Убедитесь, что контакторы в шкафу защищены от помех либо R-C цепочками при переменном токе, либо обратными диодами при постоянном токе, которые подключаются к катушкам. Варисторные разрядники перенапряжения также эффективны. Это обстоятельство важно, если контакторы управляются от преобразователя.
•Используйте для подключения электродвигателя экранированные или армированные провода и заземляйте экран на обоих концах хомутом кабеля.
Предупреждение
Нельзя пренебрегать требованиями техники безопасности при установке преобразователя!
2.4.4 Метод экранирования
Размеры А, В и С
Для размеров А, В и С комплект платы с уплотнителями для ввода кабелей и экранирования поставляется как опция, по желанию заказчика. Инструкцию по установке, сборке и экранированию смотрите на CD-ROM, поставляемом в комплекте с преобразователем 440.
Размеры D, E и F
Уплотнительная плата для этих размеров устанавливается на заводе изготовителя. Порядок подключения экранов выполняется как и на преобразователях малых размеров.
23

Руководство пользователя преобразователей MICROMASTER 440
Подключение без вводных уплотнителей
Если не используются крышки с уплотнителями для кабеля, то можно подключения выполнять в соответствии с приведенным рисунком 2-4.
Рисунок 2-4 Подключения с минимизацией эффекта излучений ЭМИ.
Обозначения
1.Силовые выводы питания
2.Контрольный кабель
3.Кабель двигателя
4.Опорная доска
5.Металлическая боковая стенка
6.Хомуты для крепления кабелей питания, двигателя и контрольного к металлическому основанию
7.Винтовой кабель
Примечание
Для улучшения экранирования кабелей двигателя и управления, могут быть использованы опционные уплотнители (не показаны на рис. 2-4).
24
Руководство пользователя преобразователей MICROMASTER 440
3 Ввод в эксплуатацию
Эта глава содержит:
•Описание элементов управления лицевой панели
•Краткое описание поставляемых как опции панелей и описание функций базовой панели оператора (Basic Operator Panel, BOP)
•Разделенное на восемь шагов руководство в конце главы, которое предоставляет простой метод изменения параметров
|
3.1 |
Блок-схема MICROMASTER 440 …..……………………………………………………. |
27 |
|
3.2 |
Способы обслуживания преобразователя…………………………………………….. |
28 |
|
3.3 |
Общее обслуживание …………………………………………………………………………. |
37 |
25
Руководство пользователя преобразователей MICROMASTER 440
Предупреждение
•Устройства MICROMASTER работают с высокими напряжениями.
•При работе электрических устройств невозможно избежать наличия опасных напряжений на определенных частях устройства.
•Устройства экстренного останова согласно EN 60204 IEC 204 (VDE 0113) должны оставаться работоспособными во всех рабочих состояниях устройства управления. Сброс устройства экстренной остановки не должен приводить к неуправляемым или неопределенным повторным пускам.
•Если возникающие в устройстве управления ошибки приводят к значительному материальному ущербу или, тем более, к серьезным телесным повреждениям (т.е. к опасным ошибкам), то должны выполняться дополнительные внешние мероприятия или предусматриваться оборудование, которое гарантирует (или принудительно обеспечивает) безопасную работу, даже при возникновении ошибок (например, независимые концевые выключатели, механические блокировки и т.д.).
•Определенные настройки параметра могут вызывать автоматический повторный пуск преобразователя после исчезновения напряжения сети.
•Данное устройство может выполнять внутреннюю защиту от перегрузки электродвигателя соответственно UL508C, часть 42. Параметр. P0610 (уровень 3) и P0335 устанавливают их по умолчанию. Защита электродвигателя от перегрузки может также производиться с помощью внешнего PTC (термистора), подключаемого к соответствующим входам.
•Устройство предназначено для применения в цепях, которые допускают симметричный ток короткого замыкания до 10.000 Ампер (действующее значение) при максимальном напряжении 230/460/575В, если устройство защищено плавким предохранителем типа H или К (см. таблицу на стр. 93).
•Устройство не может использоваться как механизм экстренного выключе-
ния (см. EN 60204, 9.2.5.4).
Осторожно
Вводы данных с панели обслуживания может выполняться только квалифицированным персоналом. Мерам предосторожности и предупреждениям неукоснительно должно уделяться особенное внимание.
26
Руководство пользователя преобразователей MICROMASTER 440
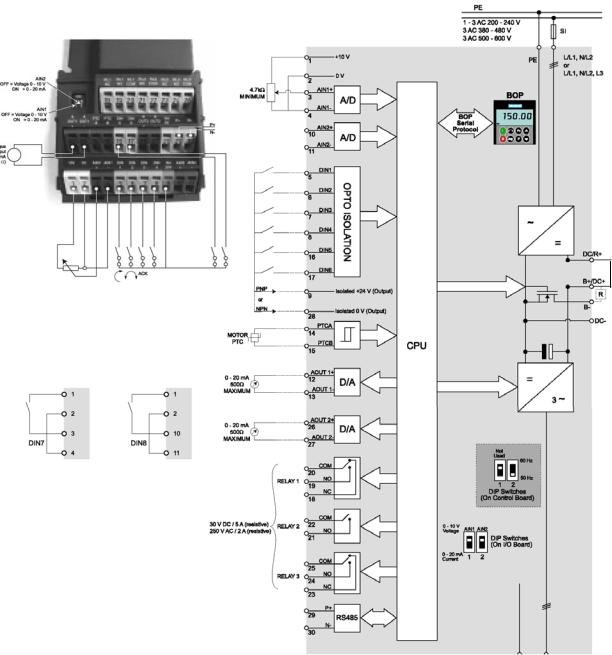
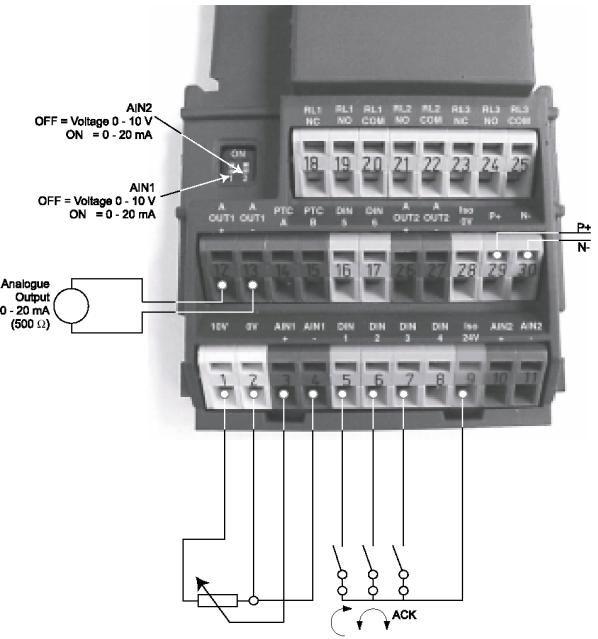
3.1Блок-схема преобразователя
Применение аналоговых входов в качестве дискретных (DIN7 и DIN8).
Примечание:
1.Уровни напряжения для использования аналоговых входов в качестве дискретных — 1,75В — Off, 3,7В — On.
2.Аналоговый вход AIN1 может использоваться как 0- 10В, 0-20мА, -10-0+10В.
3.Встроенный источник +24В может использоваться для управления аналоговыми входами (включая в цифровом виде).
Рисунок 3-1 Блок-схема преобразователя частоты
27

Руководство пользователя преобразователей MICROMASTER 440
3.2 Способы обслуживания преобразователя
MICROMASTER 440 поставляется с дисплеем состояния (Status Display Panel, SDP) как стандартная операторская панель. Установки по умолчанию имеют следующие основные значения:
•Основные данные электродвигателя — напряжение, ток и частота соответствуют энергетическим параметрам преобразователя, (рекомендуются стандартные электродвигатели Siemens).
•Линейный V/f-закон регулирования частотой вращения, управление частотой аналоговым потенциометром.
•Наибольшая частота вращения 3.000 мин-1 при 50 Hz (3.600 мин-1 при 60 Hz); задается потенциометром, подключенным к первому аналоговому входу преобразователя.
•Время разгона и время остановки = 10 с
Примечание
Установка номинальной частоты выполняется DIP переключателями, расположенными на плате управления.
• DIP переключатель 2
—Off положение для Европейского стандарта (50Гц, кВт)
—On положение для СевероАмериканского стандарта (60Гц, л.с.).
•DIP переключатель 1 не используется.
DIP переключатель для установки аналоговых входов
Рисунок 3.2.
DIP переключатель для установки частоты
Сброс на заводские установки
Для переустановки всех параметров преобразователя на заводские (по умолчанию) с помощью одной из операторских панелей или средств коммуникации необходимо установить:
1.Р0010 = 30
2.Р0970 = 1
Примечание
Процесс переустановки занимает около 3 минут
28

Руководство пользователя преобразователей MICROMASTER 440
3.2.1 Передние панели для MICROMASTER 440
Для параметрирования преобразователя Вы можете использовать одну из опционных операторских панелей, таких как «Базовая Операторская Панель» (BOP) или «Расширенная Панель Оператора» (AOP). Для более удобного обслуживания и параметрирования преобразователей можно использовать специальный инструмент — DriveMonitor — программу для настройки и документирования.
|
Панель индикации |
Базовая панель |
Расширенная панель |
Рисунок 3-3. Панели для преобразователей MICROMASTER 440
3.2.2. Обслуживание с панелью индикации статуса (SDP)
SDP поставляется стандартно с каждым преобразователем MICROMASTER 440. Поле дисплея имеет впереди два светодиода LED, которые отображают состояние при работе преобразователя.
Преобразователь с SDP может быть применен с предварительными настройками, которые закрывают потребности разнообразных пользователей.
Предварительные установки даны в таблице 3.1. Расположение зажимов изображено на фотографии клеммника управления на следующей странице данного руководства.
Таблица 3-1 Предварительные установки для работы с дисплеем состояния
|
Клеммы |
Параметр |
По умолчанию |
|
|
Дискретный вход 1 |
5 |
Р0701 = 1 |
Включение, вправо |
|
Дискретный вход 2 |
6 |
Р0702 = 12 |
Реверс |
|
Дискретный вход 3 |
7 |
Р0703 = 9 |
Сброс аварии |
|
Дискретный вход 4 |
8 |
Р0704 = 15 |
Фиксированная частота |
|
Дискретный вход 5 |
16 |
Р0705 = 15 |
Фиксированная частота |
|
Дискретный вход 6 |
17 |
Р0706 = 15 |
Фиксированная частота |
|
Дискретный вход 7 |
Через AIN 1 |
Р0707 = 0 |
Не используется |
|
Дискретный вход 8 |
Через AIN 2 |
Р0708 = 0 |
Не используется |
29
Руководство пользователя преобразователей MICROMASTER 440
Предупреждения и отображение ошибок на дисплее состояния
Оба светодиода на дисплее состояния отображают режимы работы преобразователя. Они показывают также различные предупреждения или неисправные состояния. В части 6.2 разъясняются состояния преобразователя и их индикация с помощью двух светодиодов LED.
При использовании SDP возможно следующее:
—Запуск и останов электродвигателя (Внешний ключ на входе DIN1).
—Реверсирование электродвигателя (Внешний ключ на входе DIN2).
—Сброс ошибок (Внешний ключ на входе DIN3).
Подключение внешних цепей управления можно производить по приведенному ниже рисунку.
Рисунок 3-4. Базовое включение внешних элементов управления для параметров по умолчанию с панелью SDP
30
![]()
Руководство пользователя преобразователей MICROMASTER 440
3.2.3 Быстрый просмотр и ввод параметров с панелей ВОР или АОР
Подготовка
После окончания монтажа и электрических подключений.
Установка частоты двигателя
DIP переключатель 2 OFF – 50Гц / ON – 60Гц
Включить питание
Быстрый ввод параметров Р0010 = 1 (смотрите следующую страницу)
Дальнейший ввод в действие через параметры Р0003 и Р0004
Обзор структуры параметров приведен в Разделе 5
Для более детального списка параметров смотрите «Список параметров MICROMASTER 440»
Примечание
Для пользователей, не имеющих опыта в программировании преобразователей частоты, мы рекомендуем пользоваться этим способом. Специалисты, имеющие большой опыт в настройках преобразователей частоты, могут пользоваться более полными наборами параметров без фильтра Р0004.
Важно помнить, что параметр Р0010 используется для быстрого ввода, а параметр Р0003 для ограничения числа параметров, доступ к которым разрешен. Этот параметр выделяет группу параметров по назначению, что позволяет правильно и быстро осуществить необходимое параметрирование. Такие параметры, как данные двигателя и разгон/торможение, также включены в эти группы.
После быстрого ввода в действие необходимо выйти на параметр Р3900 и установить его значение = 1, после чего преобразователь определит данные двигателя и сбросит все настройки (за исключением тех, которые определены Р0010) на заводские уставки. Это обеспечит быстрый и с минимальным количеством ошибок ввод в действие преобразователя частоты.
31

Руководство пользователя преобразователей MICROMASTER 440
Диаграмма пути быстрого ввода в работу (параметры только 1 уровня)
Р0010
Начало быстрого ввода параметров 0 – Готовность к пуску 1 – Быстрое параметрирование
30 – Заводские установки
Примечание
Параметр Р0010 должен всегда устанавливаться в 0 перед работой привода. После установки параметра Р3900 в 1 он автоматически устанавливается в 0
Р0100
Параметры Европы или С.Америки
0– мощность кВт, частота 50Гц
1– мощность л.с., частота 60Гц
2– мощность кВт, частота 60Гц
Примечание
Назначения 0 или 1 должны быть установлены в соответствии с DIP переключателями
Р0304
номинальное напряжение двигателя1) 10-2000В, устанавливается в Вольтах
Р0305
номинальный ток двигателя1) 2ххх , устанавливается в Амперах
Р0307
номинальная мощность двигателя1) 0-2000кВт(л.с), в зависимости от Р0100
Р0310
номинальная частота двигателя1) 12-650Гц, устанавливается в Герцах
Р0311
номинальная скорость двигателя1) 0-40000 1/мин, в оборотах двигателя
1)Номинальные параметры двигателя можно прочитать на шильдике двигателя.
2)Большее количество команд и заданий можно найти в других уровнях доступа.
Р0700
Выбор места команд управления2) 0 – Заводская установка 1 – Операторская панель 2 – Дискретные входы
Р1000
Выбор места задания частоты2) 0 – Нет задания частоты 1 – Операторская панель ↑ ↓ 2 – Аналоговый вход
Р1080
Минимальная частота двигателя 0-650Гц. Устанавливает минимальную частоту двигателя в Гц. При любых заданиях выходная частота будет не ниже указанной.
Р1082
Максимальная частота двигателя 0-650Гц. Устанавливает максимальную частоту двигателя в Гц. При любых заданиях выходная частота будет не выше указанной.
Р1120
Время разгона.
0-650 Сек. Время, за которое двигатель разгоняется с остановленного состояния до максимальной скорости.
Р1121
Время торможения.
0-650 Сек. Время, за которое двигатель затормозится с максимальной скорости до полной остановки.
Р3900
Завершение быстрого ввода.
0 – завершение быстрого ввода без расчета двигателя и заводских установок
1 – завершение быстрого ввода с расчетом двигателя и заводскими установками (рекомендуется)
2 — завершение быстрого ввода с расчетом двигателя и сбросом ввода/вывода 3 — завершение быстрого ввода с расчетом двигателя без сброса ввода/вывода
32

Руководство пользователя преобразователей MICROMASTER 440
3.2.4. Ввод в эксплуатацию с базовой панелью оператора (ВОР)
Базовая панель оператора (BOP), поставляемая как опция, дает возможность доступа к параметрам преобразователя и обеспечивает специфическую пользовательскую настройку MICROMASTER 440. BOP может использоваться для конфигурирования большинства преобразователей MICROMASTER 440. Поэтому нет необходимости покупать свою панель BOP для каждого преобразователя.
Панель имеет сегментные индикаторы для чтения и записи параметров преобразователя. Панель не имеет возможности собственного хранения информации и параметров после её снятия.
Примечание
•При установке панель не позволяет управлять двигателем (пуск/стоп), если используются установки привода по умолчанию. Для активизации возможности управления необходимо установить параметры Р0700 и Р1000 в «1».
•Панель может сниматься и устанавливаться на преобразователе при включенном питании преобразователя.
•Если панель предназначена для управления двигателем (Р0700 = 1), то привод остановится после снятия панели.
Таблица 3-2. Заводские установки для работы с панелью ВОР
|
Параметр |
Описание |
Для Европы (Сев. Америки) |
|
Р0100 |
Рабочий режим Евро- |
50Гц, кВт (60Гц, л.с) |
|
па/США |
||
|
Р0307 |
Ном. мощность двигателя |
В соответствии с приводом |
|
Р0310 |
Ном. частота для двигателя |
50Гц (60Гц) |
|
Р0311 |
Ном. частота вращения |
1395 (1680) об/мин |
|
Р1082 |
Макс. частота для двигате- |
50Гц (60Гц) |
|
ля |
33

Руководство пользователя преобразователей MICROMASTER 440
Клавиши базовой панели управления
|
Клавиша |
Функция |
Назначение |
|
Индикатор |
LCD показывает установку или параметр, с которой |
|
|
состояния |
преобразователь работает в данный момент. |
|
|
При нажатии клавиши преобразователь пускается. Эта |
||
|
Пуск дви- |
клавиша является по умолчанию пассивной. Клавишу |
|
|
гателя |
активизируют установкой P0700 =1 |
|
|
OFF1 — Нажатие клавиши приводит к остановке преоб- |
||
|
разователя по выбранной рампе скорости. По умолча- |
||
|
Стоп дви- |
нию клавиша пассивна, активизируется установкой |
|
|
гателя |
P0700 = 1. |
|
|
OFF 2 — Двойное нажатие (или длительное удержание) |
||
|
вызывает свободный выбег электродвигателя до оста- |
||
|
новки. |
||
|
Нажатие этой клавиши вызывает реверсирование (из- |
||
|
менение направления вращения) электродвигателя. |
||
|
Реверс |
Обратное вращение отображается знаком минус (-) |
|
|
вращения |
или мигающей десятичной точкой. По умолчанию кла- |
|
|
виша пассивна, активизируется установкой P0700 = 1. |
||
|
Нажатие этой клавиши при остановленном преобразо- |
||
|
вателе обеспечивает пуск электродвигателя с задан- |
||
|
Толчковый |
ной JOG-частотой. После отпускания клавиши преоб- |
|
|
режим |
разователь останавливает двигатель. Нажатие клави- |
|
|
ши при работающем преобразователе с электродвига- |
||
|
телем, не приводит ни к каким действиям. |
||
|
Эта клавиша может использоваться для отображения |
||
|
дополнительной информации. |
||
|
Клавиша должна нажиматься и удерживаться в тече- |
||
|
ние 2 секунд. Она указывает при работе следующее: |
||
|
1. Напряжение звена постоянного тока (Обозначено |
||
|
буквой d) в (V) |
||
|
Функции |
2. Выходной ток (A) |
|
|
3. Выходная частота (Hz) |
||
|
4. Выходное напряжение (V) |
||
|
4. Величину (выбранную в P0005) |
||
|
Повторные нажатия возвращают показания дисплея к |
||
|
текущему значению. |
||
|
Доступ к |
||
|
парамет- |
Нажатие этой клавиши обеспечивает доступ к пара- |
|
|
рам |
метрам и настройкам привода |
|
|
Нажатие этой клавиши увеличивает отображаемое |
||
|
Увеличить |
значение. Для изменения задания частоты с помощью |
|
|
значение |
BOP необходимо установить P1000 = 1 |
|
|
Нажатие этой клавиши уменьшает отображаемое зна- |
||
|
Уменьшить |
чение. Для изменения задания частоты с помощью |
|
|
значение |
BOP нужно установить P1000 = 1. |
|
Рисунок 3-5. Клавиши на базовой операторской панели
34

Руководство пользователя преобразователей MICROMASTER 440
Изменение параметров с панели ВОР
Нижеследующее описание показывает, как необходимо изменять параметры. Это описание может использоваться как руководство для установки любого параметра с помощью BOP.
Изменение параметра Р0004 — параметр доступа функций.
1. Нажмите клавишу  для доступа к параметрам
для доступа к параметрам
2. Нажимайте  до появления параметра Р0004
до появления параметра Р0004
3. Нажмите клавишу  для доступа к значению
для доступа к значению
4. Нажимайте  и
и  до установки значения
до установки значения
5. Нажимайте  для возврата и записи значения
для возврата и записи значения
6. Могут быть доступны только параметры двигателя
Изменение параметра Р1082 — установка максимальной частоты двигателя
|
Шаг |
Отображение |
|||||||||||||
|
1. |
Нажмите клавишу |
для доступа к параметрам |
||||||||||||
|
2. |
Нажимайте |
до появления параметра Р1082 |
||||||||||||
|
3. |
Нажмите клавишу |
для доступа к уровню |
||||||||||||
|
4. |
Нажмите клавишу |
для доступа к значению |
||||||||||||
|
5. |
Нажимайте |
и |
до установки значения |
|||||||||||
|
6. |
Нажимайте |
для возврата и записи значения |
||||||||||||
|
7. |
Нажмите клавишу |
для возврата к параметру |
||||||||||||
|
8. |
Нажмите клавишу |
для возврата к индикации установленного параметра |
||||||||||||
|
Рисунок 3-6. Изменение параметров с панели ВОР |
35

Руководство пользователя преобразователей MICROMASTER 440
Примечание — Сообщение «Занято»
Иногда при изменении значения параметра дисплей на BOP показывает » — — — -«. Это означает, что инвертор занят задачами более высокого приоритета или неверно указан параметр.
Данные двигателя для параметрирования
Рисунок 3-7. Пример шильдика на двигателе
Примечание
•Доступ к параметрам Р0308 и Р0309 возможен, если параметр Р0003 ≥ 2.
•Изменение параметров двигателя невозможно, если Р0010 = 1.
•Параметр Р0307 указывается в кВт или л.с., в зависимости от установок в Р0100.
Внешняя тепловая защита двигателя от перегрузки
При работе привода с частотой вращения ниже номинальной, эффективность охлаждения с помощью вентилятора, установленного на валу двигателя снижается. Следовательно, большинство двигателей требует уменьшения нагрузки для непрерывной работы на низких частотах. Чтобы гарантировать защиту двигателя от перегрева при этих условиях, PTC температурный датчик, должен быть установлен на двигателе и подключен к клеммам управления инвертора, а параметр Р0601 должен быть активизирован.
36

Руководство пользователя преобразователей MICROMASTER 440
3.2.3. Обслуживание с расширенной панели оператора (АОР)
Расширенная панель оператора (AOP) доступна как опция. Она включает в себя следующие расширенные возможности.
•Многоязычный текстовый дисплей
•Выгрузка/загрузка установок многих параметров
•Возможность обслуживания в группе до 30 преобразователей.
Для уточнения деталей обращайтесь к Руководству по АОР или к представительству Siemens в вашем регионе.
3.3. Общее обслуживание
Для получения подробного описания стандартных и расширенных параметров, пожалуйста, обращайтесь к разделу 6.
Примечание
•Инвертор не имеет силовых выключателей питания и работает, когда на него подано напряжение. Он находится в режиме ожидания с отключенным выходом, пока не будет нажата кнопка RUN или будет присутствовать сигнал ON на выбранном дискретном входе.
•Если установлены панели BOP или AOP и на дисплее отображается выбранная выходная частота (P0005 = 21), то соответствующее задание отображается примерно каждую секунду пока инвертор находится в режиме
STOP.
•Инвертор программируется под стандартное применение для четырехполюсных двигателей, которые имеют такую же номинальную мощность, как и инвертор. При использовании других двигателей необходимо ввести номинальные данные двигателя. Смотри рис. 3-7 для уточнения, как следует читать данные двигателя.
•Изменение параметров двигателя невозможно, если параметр Р0010 = 1.
•Вы должны установить Р0010 обратно в 0 для подготовки преобразователя к запуску.
37
Руководство пользователя преобразователей MICROMASTER 440
|
4 |
Применениe MICROMASTER 440 |
||
|
Эта глава содержит: |
|||
|
Разъяснение различных способов управления преобразователем |
|||
|
4.1 |
Задание частоты (Р1000)………………………………………………………………….. |
39 |
|
|
4.2 |
Источники команд (P0700)………………………………………………………………… |
39 |
|
|
4.3 |
Функции выключения и торможения…………………………………………………..40 |
||
|
4.4 |
Виды управления (P1300)………………………………………………………………….. |
42 |
|
|
4.5 |
Ошибки и предупреждения………………………………………………………………… |
42 |
38

Руководство пользователя преобразователей MICROMASTER 440
Предупреждения
•При работе электрических устройств невозможно избежать наличия опасных напряжений на определенных частях устройства.
•Устройства экстренного останова согласно EN 60204 IEC 204 (VDE 0113) должны оставаться работоспособными во всех рабочих состояниях устройства управления. Сброс устройства экстренной остановки не должен приводить к неуправляемым или неопределенным повторным пускам.
•В случаях, если короткие замыкания в приборе управления приводят к значительному материальному ущербу или, тем более, к серьезным телесным повреждениям (т.е. потенциально опасным ошибкам), то должны намечаться дополнительные внешние мероприятия или предусматриваться оборудование, которое гарантирует (или принудительно обеспечивают) безопасную работу даже при возникновении ошибок (например, независимые концевые выключатели, механические блокировки и т.д.).
•Преобразователи MICROMASTERработают с высокими напряжениями.
•Определенные установки параметров могут вызывать автоматический повторный пуск преобразователя после перерыва питающего напряжения.
•Данное устройство может выполнять внутреннюю защиту от перегрузки электродвигателя соответственно UL508C, часть 42,. См. P0610 (уровень 3) и P0335. Защита электродвигателя от перегрузки может также производиться с помощью внешнего PTC (термистора) подключаемого к дискретным входам.
•Устройство предназначено для применения в цепях, которые допускают симметричный ток короткого замыкания до 10.000 А (действующее значение) при максимальном напряжении 230/460 В, если устройство защищено инерционным плавким предохранителем (см. таблицу на стр. 93).
•Устройство не может использоваться как механизм экстренного выключе-
ния (см. EN 60204, 9.2.5.4).
4.1Задание частоты (Р1000)
•По умолчанию — клеммы 3/4 (AIN+/AIN-, 0-10V соответствует 0 — 50(60)Гц).
•Другие установки — см. описание параметра Р1000.
4.2Источники команд (P0700)
Примечание
Функции времени и сглаживания разгона и торможения воздействуют также на разгон и выбег электродвигателя. Относительно особенностей этих функций см. параметры P1120, P1121, P1130 — P1134 в системных параметрах.
Пуск двигателя
•По умолчанию — клемма 5 (высокий уровень на дискретном входе DIN1)
•Другие установки — смотрите параметры Р0700 до Р0708
Остановка двигателя
Несколько способов остановки двигателя:
•По умолчанию:
39

Руководство пользователя преобразователей MICROMASTER 440
•OFF1 — клемма 5, низкий уровень дискретного входа DIN1
•OFF2 — нажатие на кнопку Off на панели оператора (с удержанием или дважды)
•OFF3 – нет в стандартной установке.
•Другие установки — см. параметры Р0700 до Р0708.
Реверс двигателя
•По умолчанию — клемма 6 (высокий уровень на дискретном входе DIN2).
•Другие установки — см. параметры Р0700 до Р0708.
4.3Функции выключения и торможения
4.3.1 ВЫКЛ 1 (OFF1)
Эта команда (вырабатывающаяся вследствие отмены команды ВКЛ) вызывает выбег преобразователя до останова в соответствии с выбранной рампой снижения скорости.
•Параметры для изменения времени остановки см. P1121
Примечание
•Команда ВКЛ и последующая команда ВЫКЛ1 должны иметь один источник.
•Если установлена команда ВКЛ-/ВЫКЛ1 для более чем одного дискретного входа, то активным является только номер дискретного входа, установленный в последнюю очередь, например, DIN3.
•ВЫКЛ1 может комбинироваться с динамическим торможением или смешанным торможением.
4.3.2ВЫКЛ 2 (OFF2)
Эта команда вызывает свободный выбег электродвигателя до остановки.
Указание
Команда ВЫКЛ2 может иметь один или несколько источников. При предварительной установке команда ВЫКЛ2 установлена на BOP/AOP. Этот источник остается даже в случае, если одним из параметров P0701до P0708 будут определены другие источники
4.3.3 ВЫКЛ 3 (OFF3)
Команда ВЫКЛ3 вызывает быстрый останов электродвигателя с торможением. Для пуска электродвигателя при установленном ВЫКЛ3 дискретный вход должен быть закрыт (состояние высокого уровня High). Если ВЫКЛ3 будет закрыт (high), то электродвигатель может быть запущен и остановлен командами ВЫКЛ1 или ВЫКЛ2. В состоянии низкого уровня (low) ВЫКЛ3 пуск электродвигателя невозможен.
•Время остановки устанавливается в параметре Р1135
Примечание
ВЫКЛ3 может комбинировать торможение постоянным током DC, комбинированным или динамическим торможением.
40
Руководство пользователя преобразователей MICROMASTER 440
4.3.4 Динамическое торможение постоянным током
Динамическое торможение постоянным током возможно с ВЫКЛ1 и ВЫКЛ3. Питание статора двигателя постоянным током быстро тормозит электродвигатель и удерживает вал до конца времени торможения.
•Разрешение динамического торможения — P0701 — P0708
•Установка длительности торможения: см. P1233
•Установка тока торможения: см. P1232
•Установка начальной частоты торможения Р1234
Примечание
Если ни один дискретный вход не установлен на динамическое торможение и P1233 ≠ 0, то динамическое торможение включается после каждой команды ВЫКЛ1 со временем, установленным в Р1233.
4.3.5Смешанное торможение
Смешанное торможение возможно как с ВЫКЛ1 так и с ВЫКЛ3. Для смешанного торможения на переменный ток накладывается составляющая постоянного тока.
Установка тормозного тока: см. P1236
4.3.6Торможение с внешним тормозным резистором
Торможение с внешним резистором обеспечивает более качественное и линейное торможение с контролем частоты.
41
Руководство пользователя преобразователей MICROMASTER 440
4.4Виды законов регулирования напряжения (P1300)
Различные режимы работы MICROMASTER 440 определяют зависимость между частотой вращения электродвигателя и напряжением преобразователя. Возможны четыре режима работы:
|
• Линейное V/f-регулирование |
Р1300 = 0 |
Может применяться для нагрузки с изменяемым и с постоянным моментом (насосы, конвейеры) —
•Линейное V/f-регулирование с FCC (контролем потокосцепления)
Р1300 = 1
Этот способ регулирования может использоваться для увеличения к.п.д. и динамических характеристик электропривода.
|
• |
Квадратичное V/f-регулирование |
Р1300 = |
2 |
|
Этот закон регулирования применяется для приводов с насосной и венти- |
|||
|
ляторной характеристикой (с малым моментом трогания). |
|||
|
• |
Многоточечное V/f-регулирование |
Р1300 = |
3 |
|
Сведения об этом режиме работы находятся в руководстве по MM440. |
|||
|
• |
Линейное V/f-регулирование с режимом ЕСО |
Р1300 = |
4 |
|
С этой функцией происходит автоматическое снижение или повышение |
|||
|
напряжения для минимизации потерь мощности. |
|||
|
• |
V/f-регулирование для применения в текстиле |
Р1300 = |
5 |
|
Нет никакой компенсации и демпфирования. Регулятор макс. тока исполь- |
|||
|
зует частоту вместо напряжения. |
|||
|
• |
V/f-регулирование с FCC для применения в текстиле |
Р1300 = |
6 |
|
Комбинация параметров Р1300=1 и Р1300=5 |
|||
|
• |
V/f-регулирование с независимой уставкой напряжения |
Р1300 = |
19 |
|
Можно задавать напряжение в Р1330 независимо от выходной частоты |
|||
|
преобразователя (RFG). |
|||
|
• |
Безсенсорное векторное регулирование |
Р1300 = |
20 |
|
Обеспечивает точное регулирование частоты вращения двигателя без |
|||
|
применения датчика скорости. Обеспечивает высокий момент и динамиче- |
|||
|
ские свойства привода. |
|||
|
• |
Безсенсорное векторное управление моментом |
Р1300 = 22 |
Обеспечивает векторное регулирование заданного момента на двигателе без датчика момента. Применяется в технологиях, требующих поддержание заданного значения момента на валу двигателя.
4.5Ошибки и предупреждения
На панелях SDP
Если установлен SDP, то о состояниях ошибки и предупреждениях будут сигнализировать два светодиода LEDs.
Дальнейшие сведения: см. раздел 6.1. Если привод работает исправно, то
•Зеленый и желтый цвет — готовность к пуску
•Зеленый — работа привода
На панелях BOP
На панелях BOP отображаются коды ошибок и предупреждений. Подробнее они будут рассмотрены в разделе 6.3
На панелях АОР
Если установлены панели АОР, то коды ошибок и предупреждений отображаются на самой панели.
42
 Loading…
Loading…

-
Contents
-
Table of Contents
-
Bookmarks
Quick Links
MICROMASTER 440
Parameter List
Issue 01/06
User Documentation
6SE6400-5BB00-0BP0
Related Manuals for Siemens MICROMASTER 440
Summary of Contents for Siemens MICROMASTER 440
-
Page 1
MICROMASTER 440 Parameter List Issue 01/06 User Documentation 6SE6400-5BB00-0BP0… -
Page 2
Available Documentation for the MICROMASTER 440 Getting Started Guide Is for quick commissioning with SDP and BOP. Operating Instructions Gives information about features of the MICROMASTER 440, Installation, Commissioning, Control modes, System Parameter structure, Troubleshooting, Specifications and available options of the MICROMASTER 440. -
Page 3
Block Diagram and Terminals Parameter List MICROMASTER 440 Function Diagrams Parameter List User Documentation Faults and Alarms Abbreviations Valid for Issue 01/06 Converter Type Software Version MICROMASTER 440 V2.1 Issue 01/06… -
Page 4
Please refer to all Definitions and Warnings contained in the Operating Instructions. You will find the Operating Instructions on the Docu CD delivered with your inverter. If the CD is lost, it can be ordered via your local Siemens department under the Order No. 6SE6400-5AD00-1AP0. -
Page 5: Table Of Contents
Table of Contents Parameters MICROMASTER 440 This Parameter List must only be used together with the Operating Instructions of the MICROMASTER 440. Please pay special attention to the Warnings, Cautions, Notices and Notes contained in these manuals. Table of Contents Block Diagram and Terminals …………..7…
-
Page 6: Table Of Contents
Positioning down ramp …………….239 3.39 Free function blocks (FFB) …………..241 3.40 Inverter parameters …………….257 Function Diagrams …………….259 Faults and Alarms …………….. 307 Fault messages ………………307 Alarm Messages………………315 Abbreviations………………321 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 7: Block Diagram And Terminals
30 V DC / 5 A (resistive) Relay2 250 V AC / 2 A (inductive) 0 — 20 mA DIP switch current (on I/O Board) 0 — 10 V voltage Relay3 COM link RS485 U,V,W automatic Option MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 8: Power Terminals
Block Diagram and Terminals Issue 01/06 Power Terminals You can gain access to the mains and motor terminals by removing the front covers. Fig. 1-1 Frame Size A — F MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 9
Status Display Panel Elektronic box Bottom adjustment rail Bottom retaining screw Fan screws Shield connection control leads Fan fuses Transformer adaption Motor cable Phase U2, V2, W2 Motor cable PE Shield connection Fig. 1-2 Frame Size FX MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 10
Status Display Panel Elektronic box Bottom adjustment rail Bottom retaining screw Fan screws Shield connection control leads Fan fuses Transformer adaption Motor cable Phase U2, V2, W2 Motor cable PE Shield connection Fig. 1-3 Frame Size GX MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 11: Control Terminals
Digital output 3 / Changeover contact DAC2+ Analog output 2 (+) DAC2- Analog output 2 (-) Isolated output 0 V / max. 100 mA RS485 port RS485 port Fig. 1-4 Control terminals of MICROMASTER 440 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 12: Parameters
2 settings. The BiCo system allows complex functions to be programmed. Boolean and mathematical relationships can be set up between inputs (digital, analog, serial etc.) and outputs (inverter current, frequency, analog output, relays, etc.). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 13
Indicates the level of user access. There are four access levels: Standard, Extended, Expert and Service. The number of parameters that appear in each functional group depends on the access level set in P0003 (user access level). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 14
Comparison operators > Greater than >= Greater than / equal to < Less than <= Less than / equal to Equivalence operators Equal to Not equal to Logical operators && AND logic operation OR logic operation MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 15
To reset all parameters to the factory default settings; the following parameters should be set as follows: Set P0010 = 30 Set P0970 = 1 Note The reset process takes approximately 10 seconds to complete. Reset to Factory default MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 16
Seven-segment display The seven-segment display is structured as follows: Segment Bit 15 14 13 12 Segment Bit The significance of the relevant bits in the display is described in the status and control word parameters. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 17: Command And Drive Datasets — Overview
CI: PID feedback P1071[3] CI: Main setpoint scaling 1) X = Parameters will be altered during data set switchover (CDS) in the state «Run» – = Parameters will be altered in the state «Ready» only MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 18
Magnetizing curve imag 1 P1009[3] Fixed frequency 9 P0367[3] Magnetizing curve imag 2 P1010[3] Fixed frequency 10 P0368[3] Magnetizing curve imag 3 P1011[3] Fixed frequency 11 P0369[3] Magnetizing curve imag 4 P1012[3] Fixed frequency 12 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 19
P1251[3] Integration time Vdc-controller P1530[3] Motoring power limitation P1252[3] Differential time Vdc-controller P1531[3] Regenerative power limitation P1253[3] Vdc-controller output limitation P1570[3] CO: Fixed value flux setpoint P1256[3] Reaction of kinetic buffering P1574[3] Dynamic voltage headroom MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 20
Delay time permitted deviation P2484[3] No. of shaft turns = 1 Unit P2487[3] Positional error trim value P2166[3] Delay time ramp up completed P2488[3] Distance / No. of revolutions P2167[3] Switch-off frequency f_off P2168[3] Delay time T_off MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 21: Binector Input Parameters
BI: Timer 1 P1141[3] BI: RFG start P2854 BI: Timer 2 P1142[3] BI: RFG enable setpoint P2859 BI: Timer 3 P1230[3] BI: Enable DC braking P2864 BI: Timer 4 P1477[3] BI: Set integrator of n-ctrl. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 22: Connector Input Parameters
BO: XOR 3 r2867 BO: Timer 4 r2829 BO: NOT 1 r2868 BO: Nout timer 4 r2831 BO: NOT 2 r2886 BO: CMP 1 r2833 BO: NOT 3 r2888 BO: CMP 2 r2835 BO: Q D-FF 1 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 23: Connector Output Parameters
CO: Upper torque limit (total) r0086 CO: Act. active current r1539 CO: Lower torque limit (total) r0090 CO: Act. rotor angle P1570[3] CO: Fixed value flux setpoint r0394 CO: Stator resistance IGBT [%] r1583 CO: Flux setpoint (smoothed) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 24: Connector/Binector Output Parameters
CO/BO: Act. control word 1 r0747 CO/BO: State of digital outputs r0055 CO/BO: Act. control word 2 r0785 CO/BO: Zustand Analogausgang r1407 CO/BO: Status 2 of motor control r2197 CO/BO: Monitoring word 1 r2198 CO/BO: Monitoring word 2 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 25: Parameter Description
Commands, binary I/O ADC and DAC Setpoint channel / RFG Drive features Motor control Communication Alarms / warnings / monitoring Technology controller (e.g. PID) Example: P0004 = 22 specifies that only PID parameters will be visible. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 26
Defines time period after which the backlight display turns off if no operator keys have been pressed. Value: P0007 = 0: Backlight always on (default state). P0007 = 1 — 2000: Number of seconds after which the backlight will turn off. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 27
P0013 index 19 = 12 (key for user defined parameter) P0013 index 18 = 10 (commissioning parameter filter) P0013 index 17 = 3 (user access level) 4. Set P0003 = 0 to activate the user defined parameter. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 28
6. If «Store request via USS/CB» and P0014[x] are not consistent, the setting of P14[x] = «store nonvolatile (EEPROM)» has always higher priority. Store request via USS /CB Value of P 0014[x] Result EEPROM EEPROM EEPROM EEPROM EEPROM EEPROM EEPROM MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 29: Diagnosis Parameters
Def: P-Group: CONTROL Max: Displays calculated rotor speed based on inverter output frequency [Hz] x 120 / number of poles. ⋅ r0022 [1/min] r0021 [Hz] r0313 Note: This calculation makes no allowance for load-dependent slip. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 30
Note: For asynchronous motors, a limit is calculated for the torque generating current component (in conjunction with the maximum possible output voltage (r0071), motor leakage and current field weakening (r0377)) and this prevents motor stalling. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 31
Min: Datatype: Float Unit: °C Def: P-Group: MOTOR Max: Displays measured motor temperature. Index: r0035[0] : 1st. Drive data set (DDS) r0035[1] : 2nd. Drive data set (DDS) r0035[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 32
Displays electrical energy used by inverter since display was last reset (see P0040 — reset energy consumption meter). ac t ⋅ ⋅ ⋅ ⋅ ⋅ ϕ r0039 ∫ ∫ Dependency: Value is reset when P0040 = 1 (reset energy consumption meter). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 33
Displays currently selected and active drive data set (DDS). Possible Settings: 1st. Drive data set (DDS) 2nd. Drive data set (DDS) 3rd. Drive data set (DDS) Index: r0051[0] : Selected drive data set r0051[1] : Active drive data set Details: See parameter P0820. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 34
Output of Bit3 (Fault) will be inverted on digital output (Low = Fault, High = No Fault). r0052 Bit08 «Deviation setpoint / act. value» ==> see parameter P2164 r0052 Bit10 «f_act >= P1082 (f_max)» ==> see parameter P1082 r0052 Bit12 «Motor holding brake active» ==> see parameter P1215 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 35
Bit03 ==> see parameter P2170 r0053 Bit04 ==> see parameter P2155 r0053 Bit05 ==> see parameter P2155 r0053 Bit06 ==> see parameter P2150 r0053 Bit07 ==> see parameter P2172 r0053 Bit08 ==> see parameter P2172 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 36
DC brake enabled Bit11 Droop enabled Bit12 Torque control Bit13 External fault 1 Bit15 Command data set (CDS) Bit 1 Details: See description of seven-segment display given in the «Introduction to MICROMASTER System Parameters» in this handbook. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 37
160 ms Act. filtered frequency P1300 r0021 Act. frequency SLVC <20 (Observer r0063 20,22 model) 21,23 P0400 r0313 ⋅ P0408 Act. encoder frequency r0061 Encoder 1, 2 P1300 = 21,23 and P0400 = 0 —> F0090 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 38
Level Min: Datatype: Float Unit: A Def: P-Group: CONTROL Max: Displays phase currents. Index: r0069[0] : U_phase r0069[1] : V_phase r0069[2] : W_phase r0069[3] : Offset U_phase r0069[4] : Offset V_phase r0069[5] : Offset W_phase MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 39
Unit: % Def: P-Group: CONTROL Max: Displays actual modulation index. The modulation index is defined as ratio between the magnitude of the fundamental component in the inverter phase output voltage and half of the dc-link voltage. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 40
Applies when V/f control is selected in P1300 (control mode); otherwise, the display shows the value zero. r0090 CO: Act. rotor angle Level Min: Datatype: Float Unit: ° Def: P-Group: CONTROL Max: Indicates the current angle of the rotor. This function is not available on single input channel encoders. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 41
5th PZD signal r0096[5] : 6th PZD signal r0096[6] : 7th PZD signal r0096[7] : 8th PZD signal r0096[8] : 9th PZD signal r0096[9] : 10th PZD signal Note: r0096 = 100 % corresponds to 4000 hex. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 42: Inverter Parameters (Hw)
P0100 setting 2 (==> [kW], frequency default 60 [Hz]) is not overwritten by the setting of DIP switch 2 (see diagram above). P0199 Equipment system number Level Min: CStat: Datatype: U16 Unit: — Def: P-Group: — Active: first confirm QuickComm.: No Max: Equipment system number This parameter has no operation effect. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 43
3A C380-480V +10% -10% 47-63Hz 4 Cl. A 91 6SE6440-2UD25-5CA x 3A C380-480V +10% -10% 47-63Hz 7,5 no 92 6SE6440-2UD27-5CA x 3A C380-480V +10% -10% 47-63Hz 11 no 93 6SE6440-2UD31-1CA x 3A C380-480V +10% -10% 47-63Hz 15 no MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 44
Act. inverter type Min: Datatype: U16 Unit: — Def: P-Group: INVERTER Max: Type number of actual inverter identified. Possible Settings: MICROMASTER 420 MICROMASTER 440 MICRO- / COMBIMASTER 411 MICROMASTER 410 Reserved MICROMASTER 440 PX MICROMASTER 430 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 45
P ~ f P ~ f Characteristic Calenders with Application Winders Hoisting gear Pumps viscous friction Facing lathes Belt conveyors Fans Eddy-current brakes Rotary cutting Process machines Centrifuges machines Involving forming Rolling mills Planers Compressors MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 46
The different values can be taken from the appropriate Catalog or are saved in the drive inverter (refer to Fig.). The VT rated current r0207[1] or CT rated current r0207[2] represent the matching 4-pole Siemens IEC standard motor for the selected load duty cycle (refer to the diagram). Parameters r0207[1] or r0207[2] are used as default values for P0305 as a function of the CT/VT application (load duty cycle). -
Page 47
: Max. allowed unscreened cable length r0231[1] : Max. allowed screened cable length Notice: For full EMC compliance, the screened cable must not exceed 25 m in length when an EMC filter is fitted. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 48
Bit01 Reserved Bit02 Phase loss detection enable Index: P0291[0] : 1st. Drive data set (DDS) P0291[1] : 2nd. Drive data set (DDS) P0291[2] : 3rd. Drive data set (DDS) Details: See P0290 (inverter overload reaction) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 49
Active: first confirm QuickComm.: No Max: 3600 Defines inverter fan switch off delay time in seconds after drive has stopped. Note: Setting to 0, inverter fan will switch off when the drive stops, that is no delay. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 50: Motor Parameters
P1335 Slip compensation P1336 Slip limit P0320 Motor magnetizing current P0330 Rated motor slip P0331 Rated magnetization current P0332 Rated power factor P0384 Rotor time constant P1200, P1202, P1203 Flying start P1230, P1232, P1233 DC braking MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 51
MICROMASTER 410 MICROMASTER 411 MICROMASTER 420 MICROMASTER 430 MICROMASTER 440 *) Line supply voltage 1-ph. 110 V AC is stepped-up —> frequency inverter output voltage 3-ph. 230 V AC Index: P0304[0] : 1st. Drive data set (DDS) P0304[1] : 2nd. Drive data set (DDS) P0304[2] : 3rd. -
Page 52
Dependency: If P0100 = 1, values will be in [hp] — see diagram P0304 (rating plate). Changeable only when P0010 = 1 (quick commissioning). Default value is depending on inverter type and its rating data. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 53
Pole pair number recalculated automatically if parameter is changed. Default value is depending on inverter type and its rating data. Required for vector control and V/f control with speed controller. Details: See diagram in P0304 (rating plate) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 54
Unit: A Def: P-Group: MOTOR Max: Displays calculated magnetizing current of motor in [A]. Index: r0331[0] : 1st. Drive data set (DDS) r0331[1] : 2nd. Drive data set (DDS) r0331[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 55
Applications with variable torque the reduction of max. current leeds automatically to a reduction of the load / output current. Notice: Motors of series 1LA1 and 1LA8 have an internal fan. This internal motor fan must not be confused with the fan at the end of the motor shaft. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 56
(P0344, P0341, P0342). P0340 = 4: The vector control parameters are pre-assigned starting from the motor equivalent circuit diagram parameters (ESB, P0350 — P0369) and motor weight/moment of inertia, moment of inertia ratio (P0344, P0341, P0342). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 57
P2003[3] Reference torque P2174[3] Torque threshold M_thresh P2185[3] Upper torque threshold 1 P2186[3] Lower torque threshold 1 P2187[3] Upper torque threshold 2 P2188[3] Lower torque threshold 2 P2189[3] Upper torque threshold 3 P2190[3] Lower torque threshold 3 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 58
If boost settings are higher than 100 %, magnetization time may be reduced. Default value is depending on inverter type and its rating data. An excessive reduction of this time can result in insufficient motor magnetization. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 59
Since measured line-to-line, this value may appear to be higher (up to 2 times higher) than expected. The value entered in P0350 (stator resistance) is the one obtained by the method last used. Default value is depending on inverter type and its rating data. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 60
Index: P0358[0] : 1st. Drive data set (DDS) P0358[1] : 2nd. Drive data set (DDS) P0358[2] : 3rd. Drive data set (DDS) Dependency: Calculated automatically using the motor model or determined using P1910 (motor identification). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 61
Invers — Γ Γ Γ Γ — equivalent circuit : Cable res. [%] Stator res. [%] Tot.leak.react. [%] Rotor res. [%] r0372.D r0370.D r0377.D r0374.D RΓ (r0331) σ RΓ Cable µΓ Main reactance [%] mΓ r0382.D Cable MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 62
Specifies second flux value of saturation characteristic in [%] relative to rated motor voltage (P0304). Index: P0363[0] : 1st. Drive data set (DDS) P0363[1] : 2nd. Drive data set (DDS) P0363[2] : 3rd. Drive data set (DDS) Details: See P0362 (magnetizing curve flux 1). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 63
Index: P0368[0] : 1st. Drive data set (DDS) P0368[1] : 2nd. Drive data set (DDS) P0368[2] : 3rd. Drive data set (DDS) Dependency: Affects P0320 (motor magnetizing current). Details: See P0362 (magnetizing curve flux 1). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 64
: 2nd. Drive data set (DDS) r0373[2] : 3rd. Drive data set (DDS) Note: ambient temperature, refer to P0625 temperature rise of the stator winding, refer to P0627 Rated motor impedance: 0304 <=> ⋅ ⋅ 0305 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 65
⋅ (P0360 P0358) σ Index: r0382[0] : 1st. Drive data set (DDS) r0382[1] : 2nd. Drive data set (DDS) r0382[2] : 3rd. Drive data set (DDS) Note: Rated motor impedance: 0304 <=> ⋅ ⋅ 0305 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 66
Note: Actual rotor winding temperature, refer to r0633 Values greater than 25 % tend to produce excessive motor slip. Check rated motor speed [rpm] value (P0311). Rated motor impedance: 0304 <=> ⋅ ⋅ 0305 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 67: Speed Encoder
Encoders with zero pulse can also be connected, but the zero pulse is not used in MM4. The term «quadrature» in setting 2 refers to two periodic functions separated by a quarter cycle or 90 degrees. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 68
When allowed frequency difference is set to 0, both the high frequency and low frequency encoder loss detection is disabled, thus encoder loss will not be detected. If encoder loss detection is disabled and encoder loss occurs, then operation of the motor may become unstable. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 69: Application Macros
Using a PTC sensor the temperature of the motor is calculated by the sensor in conjunction with the thermal model. This allows for redundancy of the monitoring process. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 70
The data, required for the thermal motor model, is estimated from the rating plate data entered during the quick commissioning. This data permits reliable, stable operation for standard Siemens motors. If required, parameter changes must be made for motors from third-party manufacturers. We always recommend that an automatic motor data identification run is made after quick commissioning so that the electrical equivalent circuit diagram data can be determined. -
Page 71
Clearly a motor running with a high current (maybe due to boost) and a low speed, will overheat more quickly than one running at 50 or 60 Hz, full load. The MM4 take account of these factors. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 72
Active: Immediately QuickComm.: No Max: 200.0 Overtemperature of stator iron. Index: P0626[0] : 1st. Drive data set (DDS) P0626[1] : 2nd. Drive data set (DDS) P0626[2] : 3rd. Drive data set (DDS) Note: See parameter P0627 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 73
Unit: °C Def: P-Group: MOTOR Max: Displays stator winding temperature of motor mass model. Index: r0632[0] : 1st. Drive data set (DDS) r0632[1] : 2nd. Drive data set (DDS) r0632[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 74
P0640[2] : 3rd. Drive data set (DDS) Dependency: Limited to maximum inverter current or to 400 % of rated motor current (P0305), whichever is the lower. ⋅ (r0209, P0305) ⋅ P0640 P0305 Details: See function diagram for current limitation. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 75: Command Source
P0700 = 2 P0700 = 4 P0700 = 5 P0700 = 6 P0701 P0702 P0703 P0704 P0705 P0706 P0707 P0708 P0731 52.3 52.3 52.3 52.3 52.3 52.3 P0732 52.7 52.7 52.7 52.7 52.7 52.7 P0733 P0800 P0801 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 76
The following parameters are not overwritten when changing P 0700: P0810 P0811 P0820 P0821 P2810 P2812 P2814 P2816 P2818 P2820 P2822 P2824 P2826 P2828 P2830 P2832 P2834 P2837 P2840 P2843 P2846 P2849 P2854 P2859 P2864 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 77: Digital Inputs
P0700 command source or P0010 = 1, P3900 = 1, 2 or 3 quick commissioning or P0010 = 30, P0970 = 1 factory reset in order to reset. Notice: Setting 99 (BICO) for expert use only. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 78
Disable additional freq setpoint Enable BICO parameterization Index: P0703[0] : 1st. Command data set (CDS) P0703[1] : 2nd. Command data set (CDS) P0703[2] : 3rd. Command data set (CDS) Details: See P0701 (function of digital input 1). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 79
Disable additional freq setpoint Enable BICO parameterization Index: P0705[0] : 1st. Command data set (CDS) P0705[1] : 2nd. Command data set (CDS) P0705[2] : 3rd. Command data set (CDS) Details: See P0701 (function of digital input 1). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 80
P0707[1] : 2nd. Command data set (CDS) P0707[2] : 3rd. Command data set (CDS) Note: Signals above 4 V are active, signals below 1,6 V are inactive. Details: See P0701 (function of digital input 1). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 81
Cmd = CB on COM link Setpoint = USS on BOP link Cmd = CB on COM link Setpoint = CB on COM link Cmd = CB on COM link Setpoint = Analog 2 setp MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 82
Digital input 3 Bit03 Digital input 4 Bit04 Digital input 5 Bit05 Digital input 6 Bit06 Digital input 7 (via ADC 1) Bit07 Digital input 8 (via ADC 2) Note: Segment is lit when signal is active. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 83
Possible Settings: NPN mode ==> low active PNP mode ==> high active Value: NPN: Terminals 5/6/7/8/16/17 must be connected via terminal 28 ( O V). PNP: Terminals 5/6/7/8/16/17 must be connected via terminal 9 (24 V). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 84: Digital Outputs
PID output r2294 == P2292 (PID_min) 0 Closed 53.B PID output r2294 == P2291 (PID_max) 0 Closed Details: Display functions ==> see parameter r0052, r0053 Motor holding brake ==> see parameter P1215 DC brake ==> see parameter P1232, P1233 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 85
0 Closed 53.7 Act. Vdc r0026 < P2172 0 Closed 53.8 Act. Vdc r0026 > P2172 0 Closed 53.A PID output r2294 == P2292 (PID_min) 0 Closed 53.B PID output r2294 == P2291 (PID_max) 0 Closed MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 86: Analog Inputs
Wire breakage / signal loss F0080 is detected if the ADC input quantity is less than 0.5 * P0761. Analog input P0761 0,5 ⋅ P0761 Signal loss r0751 Fault acknowl. P0762 F0080 Act. ADC after scaling r0755 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 87
Max: Shows smoothed value of analog input in [%] after scaling block. Index: r0754[0] : Analog input 1 (ADC 1) r0754[1] : Analog input 2 (ADC 2) Dependency: P0757 to P0760 define range (ADC scaling). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 88
OFF = voltage input (10 V) ON = current input (20 mA) Allocation of DIPs to analog inputs is as follows: DIP on left (DIP 1) = Analog input 1 DIP on right (DIP 2) = Analog input 2 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 89
ASPmin represents lowest analog setpoint (this may be at 0 V or 20 mA). Default values provide a scaling of 0 V or 0 mA = 0 %, and 10 V or 20 mA = 100 %. MICROMASTER 440 Parameter List… -
Page 90
Sets value of Y1 in [%] as described in P0757 (ADC scaling) Index: P0758[0] : Analog input 1 (ADC 1) P0758[1] : Analog input 2 (ADC 2) Dependency: Affects P2000 to P2003 (reference frequency, voltage, current or torque) depending on which setpoint is to be generated. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 91
0.2 V wide (0.1 V to each side of center, ADC value 0 to 10 V, -50 to +50 Hz): P2000 = 50 Hz P0759 = 8 V P0760 = 75 % P0757 = 2 V P0758 = -75 % P0761 = 0.1 V P0756 = 0 or 1 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 92
Defines time delay between loss of analog setpoint and appearance of fault code F0080. Index: P0762[0] : Analog input 1 (ADC 1) P0762[1] : Analog input 2 (ADC 2) Note: Expert users can choose the desired reaction to F0080 (default is OFF2). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 93: Analog Outputs
If the value was originally negative then the corresponding bit in R0783 is set, otherwise it is cleared. Possible Settings: Index: P0775[0] : Analog output 1 (DAC 1) P0775[1] : Analog output 2 (DAC 2) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 94
The default values of the scaling block provides a scaling of: P1: 0.0 % = 0 mA P2: 100.0 % = 20 mA Dependency: Affects P2000 to P2003 (referency frequency, voltage, current or torque) depending on which setpoint is to be generated. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 95
Min: CStat: Datatype: Float Unit: — Def: P-Group: TERMINAL Active: first confirm QuickComm.: No Max: Defines y2 of output characteristic. Index: P0780[0] : Analog output 1 (DAC 1) P0780[1] : Analog output 2 (DAC 2) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 96
Displays status of analog output. Bit 0 indicates that the value of analog output 1 is negative. Bit 1 indicates that the value of analog output 2 is negative. Bitfields: Bit00 Analog output 1 -ve Bit01 Analog output 2 -ve MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 97: Parameter / Command / Drive Data Set
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO) 722.4 = Digital input 5 (requires P0705 to be set to 99, BICO) 722.5 = Digital input 6 (requires P0706 to be set to 99, BICO) Note: See parameter P0800 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 98
CO/BO: Act CtrlWd2 P0811 r0055 (0:0) r0055 CO/BO: Act BI: CDS b0 loc/rem CtrlWd1 P0810 r0054 (0:0) r0054 Changeover Changeover approx. approx. time time CDS active 4 ms 4 ms r0050 CO: Active CDS r0050 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 99
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99) 722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99) Note: P0810 is also relevant for command data set (CDS) selection. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 100
CO/BO: Act CtrlWd2 P0821 r0055 (0:0) r0055 BI: DDS bit 0 CO/BO: Act CtrlWd2 P0820 r0055 (0:0) r0055 Changeover time Changeover time approx. 50 ms approx. 50 ms DDS active r0051[1] CO: Active DDS r0051 [2] MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 101
Connect P0820 (P0821 if necessary) with DDS source (i.e. via DIN 4: P0704[0] = 99, P0820 = 722.3) Switch-over to DDS2 (check it via r0051) Commission Motor 2; Adapt all other DDS2 parameters (as required) Motor 1 Motor 2 Note: P0821 is also relevant for drive data set (DDS) selection. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 102: Bico Command Parameters
Active only when P0719 < 10. See parameter P0719 (Selection of command/setpoint source). Note: OFF1 means a ramp stop down to 0 using P1121. OFF1 is low active. For the priority of all soft commands, the following applies: OFF2, OFF3, OFF1 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 103
Active only when P0719 < 10. See parameter P0719 (Selection of command/setpoint source). Note: OFF2 means an immediate pulse inhibit; the motor coasts down. OFF2 is low active. The following applies for the priority of all of the OFF commands: OFF2, OFF3, OFF1 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 104
Dependency: Active only when P0719 < 10. See parameter P0719 (Selection of command/setpoint source). Note: OFF3 means fast ramp-down to 0 Hz through P1135. OFF3 is low-active. Priority of all OFF commands: OFF2, OFF3, OFF1 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 105: Communication Parameters
The following applies when a PROFIBUS module is used: DIP switch = 0 Address defined in P0918 (CB address) is valid DIP switch not = 0 DIP switch setting has priority and P0918 indicates DIP switch setting. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 106
Whenever a fault in index 0 is acknowledged (F1e), the fault history shifts as indicated in the diagram above. Dependency: Index 1 used only if second fault occurs before first fault is acknowledged. Details: See «Faults and Warnings» MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 107
: Recent fault trip -2, fault value 5 r0949[5] : Recent fault trip -2, fault value 6 r0949[6] : Recent fault trip -3, fault value 7 r0949[7] : Recent fault trip -3, fault value 8 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 108
Datatype: U16 Unit: — Def: P-Group: COMM Max: Firmware version data. Index: r0964[0] : Company (Siemens = 42) r0964[1] : Product type r0964[2] : Firmware version r0964[3] : Firmware date (year) r0964[4] : Firmware date (day/month) Example: Value Meaning r0964[0]… -
Page 109
Drivemonitor is displayed «NC» (not connected) in the status line or «drive busy». BOP displays «busy» After completion of the transfer process, the communication between the inverter and the PC-tools (e.g. Starter) or BOP is automatically re-established. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 110: Setpoint Source
+ Analog setpoint 2 USS on BOP link + Analog setpoint 2 USS on COM link + Analog setpoint 2 CB on COM link + Analog setpoint 2 Analog setpoint 2 + Analog setpoint 2 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 111
Be aware, by changing of parameter P1000 all BICO parameters (see table below) are modified. Note: Single digits denote main setpoints that have no additional setpoint. Changing this parameter sets (to default) all settings on item selected (see table). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 112
755.1 P1070 1.0 P1071 x = 7 755.1 755.1 755.1 755.1 755.1 755.1 755.1 755.1 P1075 1.0 P1076 Example: P1000 = 21 → P1070 = 1050.0 P1071 = 1.0 P1075 = 755.0 P1076 = 1.0 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 113: Fixed Frequencies
P1001[2] : 3rd. Drive data set (DDS) Example: Binary coded selection : DIN4 DIN3 DIN2 DIN1 0 Hz P1001 P1002 P1003 P1004 P1005 P1006 P1007 P1008 P1009 P1010 FF10 P1011 FF11 P1012 FF12 P1013 FF13 P1014 FF14 P1015 FF15 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 114
650.00 Defines fixed frequency setpoint 5. Index: P1005[0] : 1st. Drive data set (DDS) P1005[1] : 2nd. Drive data set (DDS) P1005[2] : 3rd. Drive data set (DDS) Details: See parameter P1001 (fixed frequency 1). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 115
650.00 Defines fixed frequency setpoint 11. Index: P1011[0] : 1st. Drive data set (DDS) P1011[1] : 2nd. Drive data set (DDS) P1011[2] : 3rd. Drive data set (DDS) Details: See parameter P1001 (fixed frequency 1). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 116
P1016[0] : 1st. Command data set (CDS) P1016[1] : 2nd. Command data set (CDS) P1016[2] : 3rd. Command data set (CDS) Details: See table in P1001 (fixed frequency 1) for description of how to use fixed frequencies. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 117
P1023 = 722.3 ==> Digital input 4 P1026 = 722.4 ==> Digital input 5 P1028 = 722.5 ==> Digital input 6 Dependency: Accessible only if P0701 — P0706 = 99 (function of digital inputs = BICO) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 118
P1026[1] : 2nd. Command data set (CDS) P1026[2] : 3rd. Command data set (CDS) Dependency: Accessible only if P0701 — P0706 = 99 (function of digital inputs = BICO). Details: See P1020 (fixed frequency selection Bit 0) for most common settings. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 119
P1028[1] : 2nd. Command data set (CDS) P1028[2] : 3rd. Command data set (CDS) Dependency: Accessible only if P0701 — P0706 = 99 (function of digital inputs = BICO). Details: See P1020 (fixed frequency selection Bit 0) for most common settings. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 120: Motorized Potentiometer (Mop)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99) 722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99) 19.E = MOP down via BOP MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 121
Bit13 r2036 Bit14 P0719 = 51 P0719 = 0, P0700 = 6, P1000 = 1 CB control word CB control word P0719 = 1, P0700 = 6 r2090 Bit13 r2090 Bit14 P0719 = 61 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 122
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99) 19.9 = JOG left via BOP Dependency: Active only when P0719 < 10. See parameter P0719 (Selection of command/setpoint source). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 123
Index: P1059[0] : 1st. Drive data set (DDS) P1059[1] : 2nd. Drive data set (DDS) P1059[2] : 3rd. Drive data set (DDS) Dependency: P1060 and P1061 set up and down ramp times respectively for jogging. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 124
Ramp times will be used as follows: P1060 / P1061 : JOG mode is active P1120 / P1121 : Normal mode (ON/OFF) is active P1060 / P1061 : Normal mode (ON/OFF) and P1124 is active MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 125: Setpoint Channel
P1075[0] : 1st. Command data set (CDS) P1075[1] : 2nd. Command data set (CDS) P1075[2] : 3rd. Command data set (CDS) Common Settings: = Analog input 1 setpoint 1024 = Fixed frequency setpoint 1050 = Motor potentiometer (MOP) setpoint MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 126
P1055 (BI: Enable JOG right) or P1056 (BI: Enable JOG left) define command source of JOG right or JOG left respectively. Note: P1055 = 0 and P1056 = 0 ==> Total frequency setpoint is selected. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 127
|f_act| > f_min P2153 = 0 r0053 Bit 02 Note: Value set here is valid both for clockwise and for anticlockwise rotation. Under certain conditions (e.g. ramping, current limiting), motor can run below minimum frequency. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 128
If for example P1082 = 80 Hz, P2000 = 50 Hz and the analog input is parameterised with P0757 = 0 V, P0758 = 0 %, P0759 = 10 V, P0760 = 100 %, a setpoint frequency of 50 Hz will be applied at 10 V of the analog input. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 129
Defines skip frequency 3 which avoids effects of mechanical resonance and suppresses frequencies within +/- P1101 (skip frequency bandwidth). Index: P1093[0] : 1st. Drive data set (DDS) P1093[1] : 2nd. Drive data set (DDS) P1093[2] : 3rd. Drive data set (DDS) Details: See P1091 (skip frequency 1). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 130
This function does not disable the «reverse command functions» (e.g. Reverse, ON left); rather, a reverse command causes motor to run in the positive direction only, as described above. P1110 = 1 ON/OFF1 Reverse (r1170) P1080 -P1080 (r1078) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 131: Ramp-Function Generator
Ramp times will be used as follows: P1060 / P1061 : JOG mode is active P1120 / P1121 : Normal mode (ON/OFF) is active P1060 / P1061 : Normal mode (ON/OFF) and P1124 is active MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 132
Ramp times will be used as follows: P1060 / P1061 : JOG mode is active P1120 / P1121 : Normal mode (ON/OFF) is active P1060 / P1061 : Normal mode (ON/OFF) and P1124 is active MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 133
Defines rounding time at start of ramp-down as shown in P1130 (ramp-up initial rounding time). Index: P1132[0] : 1st. Drive data set (DDS) P1132[1] : 2nd. Drive data set (DDS) P1132[2] : 3rd. Drive data set (DDS) Details: See parameter P1130. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 134
P1134[0] : 1st. Drive data set (DDS) P1134[1] : 2nd. Drive data set (DDS) P1134[2] : 3rd. Drive data set (DDS) Dependency: No effect until P1132 (Ramp-down initial rounding time) or P1133 (Ramp-down final rounding time) > 0 s. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 135
P1142[1] : 2nd. Command data set (CDS) P1142[2] : 3rd. Command data set (CDS) r1170 CO: Frequency setpoint after RFG Level Min: Datatype: Float Unit: Hz Def: P-Group: SETPOINT Max: Displays overall frequency setpoint after ramp generator. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 136: Flying Restart
Settings 4 to 6 search only in direction of setpoint. Flying start must be used in cases where the motor may still be turning (e.g. after a short mains break) or can be driven by the load. Otherwise, overcurrent trips will occur. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 137
Note: A higher value produces a flatter gradient and thus a longer search time. A lower value has the opposite effect. For closed-loop vector control, parameter P1203 is de-activated MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 138
RFG hold Bit06 N-adaption set to zero Bit07 Reserved Bit08 Reserved Bit09 Reserved Bit10 Direction Positive Bit11 Search is started Bit12 Current is applied Bit13 Search is aborted Bit14 Deviation is zero Bit15 N-controller is active MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 139: Automatic Restart
The inverter will acknowledge the faults (F0003 etc.) at power on after blackout or brownout and restarts the drive. It is necessary that the ON command is wired via digital input (DIN). Setting 6 causes the motor to restart immediately. Following table presents an overview of parameter P1210 and its functionality. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 140
Number of restart attempts Level Min: CStat: Datatype: U16 Unit: — Def: P-Group: FUNC Active: first confirm QuickComm.: No Max: Specifies number of times inverter will attempt to restart if automatic restart P1210 is activated. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 141: Motor Holding Brake
OFF2 Active OFF1/OFF3 Motor excitation finished r0056 Bit04 p0346 fmin (p1080) p1216 r0052.C Bit 12 open Brake Status closed Brake Release Time Brake Closing Time Possible Settings: Motor holding brake disabled Motor holding brake enabled MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 142
P1080, the motor is held at the minimum frequency for this time. This means that the brake can reliably close before the motor is switched into a no-current condition. P1217 ≥ Application time of the brake + relay closing time Details: See parameter P1215. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 143: Dc Braking
! DC braking is not possible when using a synchronous motor (i.e. P0300 = 2). Notice: This delay time is set in P0347 (demagnetization time). If this delay is too short, overcurrent trips can occur. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 144
Bit00 P1233 OFF1/OFF3 P0347 OFF2 f OFF ramp OFF2 P1234 DC braking OFF2 DC braking active r0053 Bit00 P1233 The DC current, that is impressed during time P1233, is specified by parameter P1232. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 145
DC braking current P1232 for the time duration set in P1233. Index: P1234[0] : 1st. Drive data set (DDS) P1234[1] : 2nd. Drive data set (DDS) P1234[2] : 3rd. Drive data set (DDS) Details: See P1232 (DC braking current) and P1233 (duration of DC braking) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 146: Compound Braking
If used with the Vdc max controller enabled the drive behaviour whilst braking may be worsened paticularly with high values of compound braking. Compound braking does not function when the drive is in vector control. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 147: Dynamic Braking
Initially the brake will operate at a high duty cycle dependant on the DC link level until the thermal limit is approached. The duty cycle specified by this parameter will then be imposed. The resistor should be able to operate at this level indefinitely without overheating. Chopper resistor Chopper control MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 148: Vdc Controller
Vdc-max controller enabled Kinetic buffering (Vdc-min controller) enabled Vdc-max controller and kinetic buffering (KIB) enabled Index: P1240[0] : 1st. Drive data set (DDS) P1240[1] : 2nd. Drive data set (DDS) P1240[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 149
P1243 = 100 % means parameters P1250, P1251 and P1252 (gain, integration time and differential time) are used as set. Otherwise, these are multiplied by P1243 (dynamic factor of Vdc-max). Note: Vdc controller adjustment is calculated automatically from motor and inverter data. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 150
Active: Immediately QuickComm.: No Max: 1000.0 Enters differential time constant for Vdc controller. Index: P1252[0] : 1st. Drive data set (DDS) P1252[1] : 2nd. Drive data set (DDS) P1252[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 151
P1256[2] : 3rd. Drive data set (DDS) Note: P1256 = 0: Maintain dclink voltage until mains is returned or drive is tripped undervoltage. The frequency is kept above the frequency limit provided in P1257. P1245 DC_min P1257 Pulse enabled MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 152
Frequency which kinetic buffering (KIB) either hold speed or disable pulses depending on P1256. Index: P1257[0] : 1st. Drive data set (DDS) P1257[1] : 2nd. Drive data set (DDS) P1257[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 153: Control Mode
User defined characteristic (see P1320) For synchronous motors (e.g. SIEMOSYN motors) P1300 = 5,6 : V/f for textil applications Slip compensation disabled. Imax controller modifies the output voltage only. Imax controller does not influence the output frequency. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 154
P1470: P gain (SLVC) P1472: I term (SLVC) P1610: Continuous torque boost (SLVC, open loop boost) P1611: Acceleration torque boost (SLVC, open loop boost) P1750: Control word of motor model P1755: Start-frequency motor model (SLVC) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 155
Allowed speed difference P0494[3] Delay speed loss reaction − − − − − − − − − 1) If the speed control (main setpoint) is selected a torque setpoint is available via the additional setpoint channel . MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 156: V/F Control Technique
P1310 ⋅ ⋅ 0305 0350 ConBoost ConBoost,1 ConBoost,5 Index: P1310[0] : 1st. Drive data set (DDS) P1310[1] : 2nd. Drive data set (DDS) P1310[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 157
P1311[0] : 1st. Drive data set (DDS) P1311[1] : 2nd. Drive data set (DDS) P1311[2] : 3rd. Drive data set (DDS) Dependency: Acceleration boost P1311 has no effect during vector operation. Note: See parameter P1310 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 158
Acceleration boost P1312 has no effect during vector operation. Note: See parameter P1310 Level r1315 CO: Total boost voltage Min: Datatype: Float Unit: V Def: P-Group: CONTROL Max: Displays total value of voltage boost (in volts). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 159
Continuous boost P1310 at zero 0 Hz Rated motor voltage P0304 at rated motor frequency P0310 The acceleration boost and starting boost defined in P1311 and P1312 are applied to V/f with programmable characteristic. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 160
4000:0 BICO parameter for selecting source of voltage setpoint for independent V/f control. Index: P1330[0] : 1st. Command data set (CDS) P1330[1] : 2nd. Command data set (CDS) P1330[2] : 3rd. Command data set (CDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 161
A value that is excessively low can result in instability. The constant voltage boost P1310 is continuously de-activated — essentially the same as when switching-in FCC. Contrary, the voltage boosts P1311 and P1312 remain active over the complete frequency range. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 162: Slip Compensation
100 % 6 % 10 % Notice: The applied value of the slip compensation (scaled by P1335) is limited by following equation: P1336 1335 P1335 ⋅ r0330 Slip_comp_ Slip_comp_max Slip_act r1337 r0065 Setpoint channel r1078 r0063 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 163: Resonance Damping
In the V/f control modes (refer to P1300), the resonance damping controller is activate in a range from approximately 5 % up to 70 % of the rated motor frequency (P0310). An excessively high value results in instability (positive feedback). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 164: Imax Controller
PI control See description in parameter P1340 for further information. Index: P1341[0] : 1st. Drive data set (DDS) P1341[1] : 2nd. Drive data set (DDS) P1341[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 165
I_max voltage controller normal PI control See description in parameter P1340 for further information. Index: P1346[0] : 1st. Drive data set (DDS) P1346[1] : 2nd. Drive data set (DDS) P1346[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 166: Soft Starting
The settings for this parameter bring benefits and drawbacks: P1350 = 0: (jump to boost voltage) Benefit: flux is built up quickly Drawback: motor may move P1350 = 1: (smooth voltage build-up) Benefit: motor less likely to move Drawback: flux build-up takes longer MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 167: Field-Orientated Vector Control
Bit10 Enable droop Bit15 DDS change active Details: See P052 (CO/BO: Status word 1) r1438 CO: Freq. setpoint to controller Level Min: Datatype: Float Unit: Hz Def: P-Group: CONTROL Max: Displays setpoint of speed controller. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 168: Speed Controller With/Without Encoder
P-Group: CONTROL Active: Immediately QuickComm.: No Max: 32001 Enters integral time of speed controller. Index: P1462[0] : 1st. Drive data set (DDS) P1462[1] : 2nd. Drive data set (DDS) P1462[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 169
If the P1482 (integral component of speed controller) is connected upon pulse enable, the integral component of the controller is set to the last value prior the pulse inhibit. Neither function works after flying start. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 170: Droop
Index: P1488[0] : 1st. Drive data set (DDS) P1488[1] : 2nd. Drive data set (DDS) P1488[2] : 3rd. Drive data set (DDS) Dependency: Droop scaling (P1489) must be > 0 for droop to be effective. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 171
Possible Settings: Disabled Enabled Index: P1492[0] : 1st. Drive data set (DDS) P1492[1] : 2nd. Drive data set (DDS) P1492[2] : 3rd. Drive data set (DDS) Dependency: Effective only if droop scaling P1489 > 0. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 172: Speed Controller Pre-Control
Enters scaling of acceleration in [%] for sensorless torque control (SLVC) at low frequencies. Index: P1499[0] : 1st. Drive data set (DDS) P1499[1] : 2nd. Drive data set (DDS) P1499[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 173: Torque Control
⇒ P1511 = r2015.1 P1500 = 2 r2015 CO: PZD from BOP link (USS) Sequence control BOP link P1000 = Additonal COM link torque setpoint Torque control COM link P1000 = 2 Torque setpoint ADC2 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 174
= 6 2050.1 2050.1 2050.1 2050.1 2050.1 P1511 755.0 2015.1 2018.1 2050.1 755.1 P1503 x = 7 755.1 755.1 755.1 755.1 755.1 755.1 P1511 Example: P1500 = 24 → P1503 = 2015.1 P1511 = 755.0 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 175
Free Function Blocks (FFB): P1501 Source Torque switch-over P0844 & OFF2 Source ON/OFF1 P0840 ON/OFF1 Details: Speed control with encoder feedback see P1460 Speed control without encoder feedback see P1470 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 176: Supplementary Torque Setpoint
Specifies fixed value for upper torque limitation. 1.5 ⋅ r0333 P1520 ± 4 ⋅ r0333 P1520 Index: P1520[0] : 1st. Drive data set (DDS) P1520[1] : 2nd. Drive data set (DDS) P1520[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 177: Torque / Power Limiting
Displays actual upper torque limitation. Resultant torque limit Power Stall limitation limitation Torque limitation r1526 r1527 P1530 P1531 Constant Constant Stall stall torque power power Dependency: The parameters r1526 and r1527 depend on P1520, P1521, P1522, P1523 and P1525. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 178
Unit: A Def: P-Group: CONTROL Max: Displays maximum torque motoring current component. r1537 CO: Max trq regenerative current Level Min: Datatype: Float Unit: A Def: P-Group: CONTROL Max: Displays maximum torque of the regenerative current component. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 179: Flux Control
The maximum possible output voltage r0071 of the drive inverter is determined by the DC link voltage r0026 and the maximum modulation depth P1803 in the gating unit. Ψ Ψ Motor P1570 N,Motor Ψ (100 %) Motor Field weakening N,Motor MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 180
P1580 as well as in the full load range using P1570. 1570 ⋅ P1580 = 0 % sd,N P1580 = x % P1580 = 100 % ⋅ 5 sd,N sd ,N MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 181
For P1610 = 0 %, a current setpoint is calculated that corresponds to the no-load case (rated magnetization current). For P1610 = 100 %, a current setpoint is calculated that corresponds to the rated motor torque. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 182: Current Controller
Displays actual output of Isd current (flux current) controller (PI controller). It contains the proportional and integral part of the PI controller. Level r1724 CO: Integral output of Isd ctrl. Min: Datatype: Float Unit: V Def: P-Group: CONTROL Max: Displays integral output of Isd current (flux current) controller (PI controller). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 183: Motor Model
Control word of motor model. This parameter controls the operation of the sensorless vector control (SLVC) at very low frequencies. This therefore includes the following conditions: Operation directly after an ON command zero crossing. Start Zero crossing Closed loop Closed loop P1755 P1755 Open loop Open loop P1755 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 184
Displays status of transition from feed-forward to observer-control and vice versa. Bitfields: Bit00 Transit to SLVC open loop Bit01 N-adaption enabled Bit02 Transit to SLVC closed loop Bit03 Speed controller enabled Bit04 Current injection Bit05 Start flux decrease Bit14 Rs adapted Bit15 Xh adapted MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 185
Sets the minimum time when the changeover frequency is exceeded when changing from the open-loop controlled into the closed-loop controlled mode. Index: P1759[0] : 1st. Drive data set (DDS) P1759[1] : 2nd. Drive data set (DDS) P1759[2] : 3rd. Drive data set (DDS) Dependency: Refer to P1750, P1755, P1756 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 186
Enable observer Rs/Xm-adapt. Index: P1780[0] : 1st. Drive data set (DDS) P1780[1] : 2nd. Drive data set (DDS) P1780[2] : 3rd. Drive data set (DDS) Note: Only stator resistance adaptation is carried out for synchronous motors. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 187
P-Group: CONTROL Max: Displays main reactance adaptation from controller in [%] relative to rated impedance. f ≤ is valid r0382 r1787 ⋅ Γ Γ Γ Start adapt Note: Rated motor impedance: 0304 <=> ⋅ ⋅ 0305 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 188: Inverter Parameters (Modulator)
P1820[2] : 3rd. Drive data set (DDS) Dependency: If positive and negative revolution is enabled, frequency setpoint is directly used. If both positive and negative revolution are disabled, reference value is set to zero. Details: See P1000 (select frequency setpoint) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 189: Motor Data Identification
If the motor data identification routine is activated (e.g. P1910 = 1), then at the next ON command, the measuring operation is started and alarm A0541 is generated. After the measurement is completed, both P1910 and the alarm are reset. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 190
Identified stator inductance 1 Level Min: Datatype: Float Unit: — Def: P-Group: MOTOR Max: Displays identified stator inductance. Index: r1916[0] : U_phase r1916[1] : V_phase r1916[2] : W_phase Details: See P1915 (identified nominal stator inductance). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 191
Specifies reference voltage for generation of a test voltage vector (e.g. used for shunt calibration). Level P1931 Phase Min: CStat: Datatype: U16 Unit: — Def: P-Group: INVERTER Active: Immediately QuickComm.: No Max: Defines phase of voltage vector MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 192: Speed Optimization
(standardized (Hex) or physical (i.e. Hz) values) may differ. MICROMASTER implicitly makes an automatic conversion to the target value. P2016 r0021 r0021[Hz] USS-PZD ⋅ y[Hex] 4000 BOP link P2000[Hz] x[Hz] y[Hex] r2015 P1070 USS-PZD r2015[1] ⋅ y[Hz] 2000 BOP link 4000[Hex] y[Hz] x[Hex] MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 193
If a BICO connection is made between two parameters, the «unit» of the parameters (standardized (Hex) or physical (i.e. V) values) may differ. MICROMASTER implicitly makes an automatic conversion to the target value. P0771 r0026 r0026[V] ⋅ y[Hex] 4000 P2001[V] x[V] y[Hex] MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 194
If a BICO connection is made between two parameters, the «unit» of the parameters (standardized (Hex) or physical (i.e. kW / hp) values) may differ. MICROMASTER implicitly makes an automatic conversion to the target value. P2019 r0032 r0032 ⋅ y[Hex] 4000 COM link r2004 x[kW] y[Hex] x[hp] depending on P0100 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 195: Communication Parameters (Uss, Cb)
P2011[0] : Serial interface COM link P2011[1] : Serial interface BOP link Note: You can connect up to a further 30 inverters via the serial link (i.e. 31 inverters in total) and control them with the USS serial bus protocol. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 196
When P2012 is greater than or equal to 4 the additional control word (2nd control word) must transferred in the 4th PZD-word, if the serial interface controls the inverter (P0700 or P0719). STW2 PZD1 PZD2 PZD3 PZD4 P2012 Control word Main setpoint Main actual value Status word Process data MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 197
P2013 = 3 P2013 = 4 P2013 = 127 Master → MM4 22BC 0000 0005 22BC 0000 0000 0005 22BC 0000 0005 0000 MM4 → Master 12BC 0000 0005 12BC 0000 0000 0005 12BC 0000 0005 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 198
2nd PZD-word, When P2012 is greater than or equal to 4 the additional control word (2nd control word) must transferred in the 4th PZD-word, if the above serial interface controls the inverter (P0700 or P0719). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 199
P2016[0] = 52.0 (default). In this case, the value of r0052[0] (CO/BO: Status word) is transmitted as 1st PZD to the BOP link. Note: If r0052 not indexed, display does not show an index («.0» ). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 200
2nd PZD-word, When P2012 is greater than or equal to 4 the additional control word (2nd control word) must transferred in the 4th PZD-word, if the above serial interface controls the inverter (P0700 or P0719). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 201
(ADR) does not correspond to the node number (for slave) or the expected slave node number (for the master). Index: r2025[0] : Serial interface COM link r2025[1] : Serial interface BOP link MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 202
Bit06 Setpoint enable Bit07 Fault acknowledge Bit08 JOG right Bit09 JOG left Bit10 Control from PLC Bit11 Reverse (setpoint inversion) Bit13 Motor potentiometer MOP up Bit14 Motor potentiometer MOP down Bit15 CDS Bit 0 (Local/Remote) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 203
Drive data set (DDS) Bit 1 Bit08 PID enabled Bit09 DC brake enabled Bit11 Droop enabled Bit12 Torque control Bit13 External fault 1 Bit15 Command data set (CDS) Bit 1 Details: See r2033 (control word 2 from BOP link). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 204
2nd PZD-word, When P2012 is greater than or equal to 4 the additional control word (2nd control word) must transferred in the 4th PZD-word, if the above serial interface controls the inverter (P0700 or P0719). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 205
: CB diagnosis 1 r2054[2] : CB diagnosis 2 r2054[3] : CB diagnosis 3 r2054[4] : CB diagnosis 4 r2054[5] : CB diagnosis 5 r2054[6] : CB diagnosis 6 Details: See relevant communications board manual. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 206
PID enabled Bit09 DC brake enabled Bit11 Droop enabled Bit12 Torque control Bit13 External fault 1 Bit15 Command data set (CDS) Bit 1 Details: See relevant communication board manual for protocol definition and appropriate settings. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 207: Faults, Alarms, Monitoring
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO) 722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99) 722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 208
Total number of warnings Level Min: CStat: Datatype: U16 Unit: — Def: P-Group: ALARMS Active: first confirm QuickComm.: No Max: Displays number of warning (up to 4) since last reset. Set to 0 to reset the warning history. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 209
Month (1 — 12) Years (00 — 250) Time is measured from Jan 1st 2000. Values are in binary form. Index: P2115[0] : Real Time, Seconds+Minutes P2115[1] : Real Time, Hours+Days P2115[2] : Real Time, Month+Year MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 210
Specifies time constant of first-order frequency filter. The filtered frequency is then compared to the thresholds. Index: P2153[0] : 1st. Drive data set (DDS) P2153[1] : 2nd. Drive data set (DDS) P2153[2] : 3rd. Drive data set (DDS) Details: See diagram in P2155, P2157 and P2159 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 211
Delay time for comparing frequency to threshold f_2 (P2157). Index: P2158[0] : 1st. Drive data set (DDS) P2158[1] : 2nd. Drive data set (DDS) P2158[2] : 3rd. Drive data set (DDS) Details: See diagram in P2157 (threshold frequency f_2) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 212
> 0 Hyst . freq. f_hys 0.00 … 10.00 [Hz] P2150.D (3.00) Index: P2161[0] : 1st. Drive data set (DDS) P2161[1] : 2nd. Drive data set (DDS) P2161[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 213
Delay time for detecting permitted deviation of frequency from setpoint. Index: P2165[0] : 1st. Drive data set (DDS) P2165[1] : 2nd. Drive data set (DDS) P2165[2] : 3rd. Drive data set (DDS) Details: See diagram in P2164. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 214
P2168[0] : 1st. Drive data set (DDS) P2168[1] : 2nd. Drive data set (DDS) P2168[2] : 3rd. Drive data set (DDS) Dependency: Active if holding brake (P1215) not parameterized. Details: See diagram in P2167 (switch-off frequency) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 215
Defines delay time prior to activation of current comparison. Index: P2171[0] : 1st. Drive data set (DDS) P2171[1] : 2nd. Drive data set (DDS) P2171[2] : 3rd. Drive data set (DDS) Details: See diagram in P2170 (threshold current I_thresh) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 216
Defines delay time prior to activation of threshold comparison. Index: P2173[0] : 1st. Drive data set (DDS) P2173[1] : 2nd. Drive data set (DDS) P2173[2] : 3rd. Drive data set (DDS) Details: See diagram in P2172 (threshold DC-link voltage) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 217
QuickComm.: No Max: 10000 Delay time for identification that motor is pulled out. Index: P2178[0] : 1st. Drive data set (DDS) P2178[1] : 2nd. Drive data set (DDS) P2178[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 218: Load Torque Monitoring
Trip: Low torque / frequency Trip: High torque / frequency Trip: High / low torque / frequency Index: P2181[0] : 1st. Command data set (CDS) P2181[1] : 2nd. Command data set (CDS) P2181[2] : 3rd. Command data set (CDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 219
Sets a threshold F2 for comparing actual torque to torque the envelope for belt failure detection. Index: P2183[0] : 1st. Drive data set (DDS) P2183[1] : 2nd. Drive data set (DDS) P2183[2] : 3rd. Drive data set (DDS) Details: See P2182 (belt threshold frequency 1). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 220
Upper limit threshold value 3 for comparing actual torque. Index: P2189[0] : 1st. Drive data set (DDS) P2189[1] : 2nd. Drive data set (DDS) P2189[2] : 3rd. Drive data set (DDS) Details: See P2182 (belt threshold frequency 1). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 221
Motor blocked Bit07 Motor pulled out Bit08 | I_act r0068 | > P2170 Bit09 | m_act | > P2174 & setpoint reached Bit10 | m_act | > P2174 Bit11 Belt failure warning Bit12 Belt failure trip MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 222: Technology Controller (Pid Controller)
DIN1 to DIN6 or from any other BiCo source. The minimum and maximum motor frequencies (P1080 and P1082) as well as the skip frequencies (P1091 to P1094) remain active on the inverter output. However, enabling skip frequencies with PID control can produce instabilities. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 223
PID — FF7 P1008 PID — FF8 P1009 PID — FF9 P1010 PID — FF10 P1011 PID — FF11 P1012 PID — FF12 P1013 PID — FF13 P1014 PID — FF14 P1015 PID — FF15 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 224
200.00 Defines Fixed PID Setpoint 5 Index: P2205[0] : 1st. Drive data set (DDS) P2205[1] : 2nd. Drive data set (DDS) P2205[2] : 3rd. Drive data set (DDS) Details: See P2201 (Fixed PID Setpoint 1). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 225
200.00 Defines Fixed PID Setpoint 11 Index: P2211[0] : 1st. Drive data set (DDS) P2211[1] : 2nd. Drive data set (DDS) P2211[2] : 3rd. Drive data set (DDS) Details: See P2201 (Fixed PID Setpoint 1). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 226
Direct selection Direct selection + ON command Binary coded selection + ON command Index: P2217[0] : 1st. Command data set (CDS) P2217[1] : 2nd. Command data set (CDS) P2217[2] : 3rd. Command data set (CDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 227
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO) 722.4 = Digital input 5 (requires P0705 to be set to 99, BICO) 722.5 = Digital input 6 (requires P0706 to be set to 99, BICO) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 228
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO) 722.4 = Digital input 5 (requires P0705 to be set to 99, BICO) 722.5 = Digital input 6 (requires P0706 to be set to 99, BICO) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 229
Neg. PID-MOP setpoint is allowed Neg. PID-MOP setpoint inhibited Note: Setting 0 enables a change of motor direction using the motor potentiometer setpoint (increase/decrease frequency either by using digital inputs or motor potentiometer up/down buttons. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 230
Allows user to set a digital PID setpoint in [%]. Index: P2240[0] : 1st. Drive data set (DDS) P2240[1] : 2nd. Drive data set (DDS) P2240[2] : 3rd. Drive data set (DDS) Note: P2240 = 100 % corresponds to 4000 hex MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 231
Application Control structure Motor control setpoint Variable speed drive (VSD) Motor control setpoint limit − feedback PID control Motor setpoint control limit setpoint − feedback Dancer control MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 232
USS on BOP link 2019.1 USS on COM link 2050.1 CB on COM link P2264 CI: PID feedback 755.0 Analog input 1 755.1 Analog input 2 Dependency: Active when PID loop is enabled (see P2200). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 233
CStat: Datatype: Float Unit: — Def: 100.00 P-Group: TECH Active: Immediately QuickComm.: No Max: 100.00 Gain factor for PID trim. This gain factor scales the trim signal, which is added to the main PID setpoint. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 234
(F0001). r2260 CO: PID setpoint after PID-RFG Level Min: Datatype: Float Unit: % Def: P-Group: TECH Max: Displays total active PID setpoint after PID-RFG in [%]. Note: r2260 = 100 % corresponds to 4000 hex MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 235
Defines time constant for PID feedback filter. Level r2266 CO: PID filtered feedback Min: Datatype: Float Unit: % Def: P-Group: TECH Max: Displays PID feedback signal in [%]. Note: r2266 = 100 % corresponds to 4000 hex MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 236
CO: PID error Level Min: Datatype: Float Unit: % Def: P-Group: TECH Max: Displays PID error (difference) signal between setpoint and feedback signals in [%]. Note: r2273 = 100 % corresponds to 4000 hex MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 237
If F max (P1082) is greater than P2000 (reference frequency), either P2000 or P2291 (PID output upper limit) must be changed to achieve F max. Note: P2291 = 100 % corresponds to 4000 hex (as defined by P2000 (reference frequency)). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 238
3 is the choice. For cases where no D term is wanted then option 4 can be selected. The tuning procedure is the same for all options. It is just the calculation of P,I and D values that is different. After autotune this parameter is set to zero (autotune completed). MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 239: Positioning Down Ramp
Defines the ratio between number of motor shaft revolutions to equal one revolution of the gearbox output shaft. Index: P2482[0] : 1st. Drive data set (DDS) P2482[1] : 2nd. Drive data set (DDS) P2482[2] : 3rd. Drive data set (DDS) MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 240
Positioning ramp down is an open loop control method. So, there might be a difference between the position setpoint and the calculated actual position shown in r2489. That means, it could happen that the setpoint position is already reached, although r2489 displays a different actual position . MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 241: Free Function Blocks (Ffb)
P2801[3] = 2, P2801[4] = 2, P2802[3] = 3, P2802[4] = 2 FFBs will be calculated in following order: P2802[3], P2801[3] , P2801[4], P2802[4] Dependency: Set P2800 to 1 to enable function blocks. All active function blocks will be calculated in every 132 ms. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 242
P2801[3] = 2, P2801[4] = 2, P2802[3] = 3, P2802[4] = 2 FFBs will be calculated in following order: P2802[3], P2801[3] , P2801[4], P2802[4] Dependency: Set P2800 to 1 to enable function blocks. All active function blocks will be calculated in every 132 ms. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 243
BO: AND 3 Min: Datatype: U16 Unit: — Def: P-Group: TECH Max: Output of AND 3 element. Displays and logic of bits defined in P2814[0], P2814[1]. Dependency: P2801[2] is active level for the AND element. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 244
BO: OR 3 Level Min: Datatype: U16 Unit: — Def: P-Group: TECH Max: Output of OR 3 element. Displays or logic of bits defined in P2820[0], P2820[1]. Dependency: P2801[5] is active level for the OR element. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 245
BO: XOR 3 Level Min: Datatype: U16 Unit: — Def: P-Group: TECH Max: Output of XOR 3 element. Displays exclusive-or logic of bits defined in P2826[0], P2826[1]. Dependency: P2801[8] is active level for the XOR element. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 246
BO: NOT 3 Level Min: Datatype: U16 Unit: — Def: P-Group: TECH Max: Output of NOT 3 element. Displays not logic of bit defined in P2832. Dependency: P2801[11] is active level for the NOT element. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 247
P2837[0], P2837[1], P2837[2], P2837[3] define inputs of D-FlipFlop 2, outputs are P2838, 2839. Index: P2837[0] : Binector input: Set P2837[1] : Binector input: D input P2837[2] : Binector input: Store pulse P2837[3] : Binector input: Reset Dependency: P2801[13] is active level for the D-FlipFlop. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 248
P2801[15] is active level for the RS-FlipFlop. r2844 BO: Q RS-FF 2 Level Min: Datatype: U16 Unit: — Def: P-Group: TECH Max: Displays output of RS-FlipFlop 2, inputs are defined in P2843[0], P2843[1] Dependency: P2801[15] is active level for the RS-FlipFlop. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 249
P2801[16] is active level for the RS-FlipFlop. r2848 BO: NOT-Q RS-FF 3 Level Min: Datatype: U16 Unit: — Def: P-Group: TECH Max: Displays Not-output of RS-FlipFlop 3, inputs are defined in P2846[0], P2846[1] Dependency: P2801[16] is active level for the RS-FlipFlop. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 250
P-Group: TECH Active: first confirm QuickComm.: No Max: 9999.9 Defines delay time of timer 1. P2849, P2850, P2851 are the inputs of the timer, outputs are P2852, P2853. Dependency: P2802[0] is active level for the timer. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 251
Min: Datatype: U16 Unit: — Def: P-Group: TECH Max: Displays output of timer 2. P2854, P2855, P2856 are the inputs of the timer, outputs are P2857, P2858. Dependency: P2802[1] is active level for the timer. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 252
P-Group: TECH Active: first confirm QuickComm.: No Max: 9999.9 Defines delay time of timer 4. P2864, P2865, P2866 are the inputs of the timer, outputs are P2867, P2868. Dependency: P2802[3] is active level for the timer. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 253
P2871[1] : Connector input 1 (CI 1) Dependency: P2802[5] is active level for the Adder. r2872 CO: ADD 2 Level Min: Datatype: Float Unit: % Def: P-Group: TECH Max: Result of Adder 2. Dependency: P2802[5] is active level for the Adder. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 254
P2877[1] : Connector input 1 (CI 1) Dependency: P2802[8] is active level for the Multiplier. r2878 CO: MUL 1 Level Min: Datatype: Float Unit: % Def: P-Group: TECH Max: Result of Multiplier 1. Dependency: P2802[8] is active level for the Multiplier. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 255
P2883[1] : Connector input 1 (CI 1) Dependency: P2802[11] is active level for the Divider. r2884 CO: DIV 2 Level Min: Datatype: Float Unit: % Def: P-Group: TECH Max: Result of Divider 2. Dependency: P2802[11] is active level for the Divider. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 256
Range : — 200% … 200 % P2890 CO: Fixed setpoint 2 in [%] Level Min: -200.00 CStat: Datatype: Float Unit: % Def: 0.00 P-Group: TECH Active: first confirm QuickComm.: No Max: 200.00 Fixed percent setting 2. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 257: Inverter Parameters
Datatype: U16 Unit: — Def: P-Group: — Max: Used to classify firmware (only for SIEMENS internal purposes). Index: r3954[0] : CM version (major release) r3954[1] : CM version (minor release) r3954[2] : CM version (baselevel or patch) r3954[3] : GUI ID…
-
Page 258
See r0947 (last fault code) r3986[2] Number of parameters Level Min: Datatype: U16 Unit: — Def: P-Group: — Max: Number of parameters on the drive Index: r3986[0] : Read only r3986[1] : Read & write MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 259: Function Diagrams
Issue 01/06 Function Diagrams Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 260
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 261
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 262
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 263
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 264
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 265
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 266
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 267
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 268
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 269
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 270
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 271
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 272
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 273
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 274
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 275
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 276
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 277
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 278
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 279
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 280
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 281
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 282
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 283
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 284
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 285
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 286
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 287
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 288
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 289
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 290
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 291
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 292
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 293
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 294
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 295
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 296
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 297
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 298
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 299
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 300
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 301
Issue 01/06 Function Diagrams ⋅ ⋅ ⋅ MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 302
Function Diagrams Issue 01/06 ⋅ ⋅ ⋅ MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 303
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 304
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 305
Issue 01/06 Function Diagrams MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 306
Function Diagrams Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 307: Faults And Alarms
(regenerative mode). the motor can be generating as it is decelerating quickly or due to the fact that an active load is driving the motor. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 308
(P0604) ? F0012 No inverter temperature signal STOP I Quit Refer to F0001 Cause wire breakage of the inverter-temperature sensor (heatsink) Diagnosis & Remedy replace the inverter MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 309
«overcurrent». If fault F0022 sporadically occurs, the causes can be as follows: sudden load changes or mechanical obstructions extremely short ramp-up times (accelerating times) poor optimization of the sensorless closed-loop vector control incorrect braking resistor is installed with an excessively low resistance MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 310
F0040 is therefore only to be expected while the inverter is being manufactured and not in operation. Diagnosis & Remedy change the drive MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 311
I/O EEPROM read operation or invalid data. Diagnosis & Remedy Please check the following: check I/O data and if required repeat the operation the installation of the I/O module in the inverter if required, replace the I/O module MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 312
F0085 External fault STOP II Quit Refer to F0001 Cause external fault as a result of command input via terminals. Diagnosis & Remedy inhibit terminal input to initiate fault. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 313
= 8: Several tests carried-out at the I/O module were unsuccessful (only MICROMASTER 420) r0949 = 16: Failure of the internal RAM at the switch-on test Diagnosis & Remedy the drive is functional, but several functions are not correctly executed. replace the drive MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 314
P1611 for sensorless closed-loop vector control use closed-loop vector control with encoder instead of sensorless closed-loop vector control. activate the V/f closed-loop control mode (P1300 less than 20) instead of closed-loop vector control MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 315: Alarm Messages
A0506 Inverter load duty cycle Cause difference between the temperature at the heatsink and IGBT exceeds the alarm limit values. Diagnosis & Remedy please ensure that the load duty cycle and load surge lie within the permissible limits. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 316
(P0344)? the permissible overtemperature can be changed using P0626, P0627, P0628, if the motor is not a standard Siemens motor. If P0601 = 2, then please check the following: is the temperature displayed in r0035 plausible? is an KTY84 temperature sensor being used? (others are not supported). -
Page 317
CB User Manual A0705 CB alarm 6 Cause CB-(Communications module)-specific Diagnosis & Remedy refer to the CB User Manual A0706 CB alarm 7 Cause CB-(Communications module)-specific Diagnosis & Remedy refer to the CB User Manual MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 318
P1240). the kinetic energy of the motor is used to buffer the DC link voltage and therefore to slow down the drive. therefore brief line failures no longer automatically result in an undervoltage trip. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 319
P2192 (delay time, load torque monitoring) A0936 PID auto tuning active Cause PID auto tuning (P2350) is selected or is presently running. Diagnosis & Remedy after automatic PID optimization has been completed, the alarm is reset. MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 320
Faults and Alarms Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 321: Abbreviations
Clockwise Digital analog converter Digital analog converter Direct current Drive data set Digital input DIP switch DOUT Digital output Drive state European Economic Community EEPROM Electrical erasable programmable read-only memory ELCB Earth leakage circuit breaker MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0…
-
Page 322
PID controller (proportional, integral, derivative) Parameter ID Parameter ID value Programmable logic controller Parameter list Positive negative positive Potentiometer Parameter process data object Positive temperature coefficient Parameter value Pulse-width modulation Power extension Process data Quick commissioning Random-access memory MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 323
Revolutions per minute Scaling Status display panel SLVC Sensorless vector control Control word Start of text Space vector modulation Transistor-transistor logic Universal serial interface Vector control DC-link voltage Variable torque Status word ZUSW Additional setpoint MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 324
Abbreviations Issue 01/06 MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 325
Suggestions and/or Corrections Suggestions Corrections Siemens AG For Publication/Manual: Automation & Drives Group MICROMASTER 440 SD SPA PM 4 Parameter List P.O. Box 3269 D-91050 Erlangen Federal Republic of Germany Email: documentation.sd@siemens.com User Documentation From Order number: 6SE6400-5BB00-0BP0 Name: Date of Issue: 01/06… -
Page 326
MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 327
MICROMASTER 440 Parameter List 6SE6400-5BB00-0BP0… -
Page 328
Siemens AG Automation and Drives Group (A&D) Standard Drives (SD) Division Postfach 3269, D-91050 Erlangen © Siemens AG, 2001, 2002, 2003, 2004, 2005 Federal Republic of Germany Subject to change without prior notice Siemens Aktiengesellschaft Order No.: 6SE6400-5BB00-0BP0…
 Ввод в эксплуатацию с базовой панелью оператора (ВОР) Базовая панель оператора (BOP), поставляемая как опция, дает возможность доступа к параметрам преобразователя и обеспечивает специфическую пользовательскую настройку MICROMASTER 440. BOP может использоваться для конфигурирования боль- шинства преобразователей MICROMASTER 440. Поэтому нет необходимости покупать свою панель BOP для каждо- го преобразователя.
Ввод в эксплуатацию с базовой панелью оператора (ВОР) Базовая панель оператора (BOP), поставляемая как опция, дает возможность доступа к параметрам преобразователя и обеспечивает специфическую пользовательскую настройку MICROMASTER 440. BOP может использоваться для конфигурирования боль- шинства преобразователей MICROMASTER 440. Поэтому нет необходимости покупать свою панель BOP для каждо- го преобразователя.
Панель имеет сегментные индикаторы для чтения и записи параметров преобразователя. Панель не имеет возможности собственного хранения информации и параметров после её снятия.
Примечание
• При установке панель не позволяет управлять двигателем (пуск/стоп), если используются установки привода по умолчанию. Для активизации возмож- ности управления необходимо установить параметры Р0700 и Р1000 в «1».
• Панель может сниматься и устанавливаться на преобразователе при вклю-
ченном питании преобразователя.
 • Если панель предназначена для управления двигателем (Р0700 = 1), то привод остановится после снятия панели.
• Если панель предназначена для управления двигателем (Р0700 = 1), то привод остановится после снятия панели.
Руководство пользователя преобразователей MICROMASTER 440
Клавиши базовой панели управления Клавиша Функция Назначение
Клавиша Функция Назначение

 Индикатор состояния
Индикатор состояния
Пуск дви-
 гателя
гателя
LCD показывает установку или параметр, с которой преобразователь работает в данный момент.
При нажатии клавиши преобразователь пускается. Эта клавиша является по умолчанию пассивной. Клавишу активизируют установкой P0700 =1
 Стоп дви-
Стоп дви-
гателя
 Реверс вращения
Реверс вращения
 Толчковый режим
Толчковый режим
 Функции
Функции Доступ к парамет- рам
Доступ к парамет- рам
 Увеличить значение
Увеличить значение

 Уменьшить значение
Уменьшить значение
OFF1 — Нажатие клавиши приводит к остановке преоб- разователя по выбранной рампе скорости. По умолча- нию клавиша пассивна, активизируется установкой P0700 = 1.
OFF 2 — Двойное нажатие (или длительное удержание) вызывает свободный выбег электродвигателя до оста- новки.
Нажатие этой клавиши вызывает реверсирование (из- менение направления вращения) электродвигателя. Обратное вращение отображается знаком минус (-) или мигающей десятичной точкой. По умолчанию кла- виша пассивна, активизируется установкой P0700 = 1.
Нажатие этой клавиши при остановленном преобразо- вателе обеспечивает пуск электродвигателя с задан- ной JOG-частотой. После отпускания клавиши преоб- разователь останавливает двигатель. Нажатие клави- ши при работающем преобразователе с электродвига- телем, не приводит ни к каким действиям.
Эта клавиша может использоваться для отображения дополнительной информации.
Клавиша должна нажиматься и удерживаться в тече-
ние 2 секунд. Она указывает при работе следующее:
1. Напряжение звена постоянного тока (Обозначено буквой d) в (V)
2. Выходной ток (A)
3. Выходная частота (Hz)
4. Выходное напряжение (V)
4. Величину (выбранную в P0005)
Повторные нажатия возвращают показания дисплея к текущему значению.
Нажатие этой клавиши обеспечивает доступ к пара-
метрам и настройкам приводаНажатие этой клавиши увеличивает отображаемое значение. Для изменения задания частоты с помощью BOP необходимо установить P1000 = 1
Нажатие этой клавиши уменьшает отображаемое зна- чение. Для изменения задания частоты с помощью BOP нужно установить P1000 = 1.
Изменение параметров с панели ВОР
Нижеследующее описание показывает, как необходимо изменять параметры. Это описание может использоваться как руководство для установки любого параметра с помощью BOP.
Изменение параметра Р0004 — параметр доступа функций.
 Шаг Отображение
Шаг Отображение

 1. Нажмите клавишу для доступа к параметрам
1. Нажмите клавишу для доступа к параметрам ![]()
 2. Нажимайте
2. Нажимайте ![]() до появления параметра Р0004
до появления параметра Р0004 ![]() 3. Нажмите клавишу для доступа к значению
3. Нажмите клавишу для доступа к значению ![]() 4. Нажимайте
4. Нажимайте ![]() и
и ![]() до установки значения
до установки значения ![]() 5. Нажимайте для возврата и записи значения
5. Нажимайте для возврата и записи значения ![]()
6. Могут быть доступны только параметры двигателя
Изменение параметра Р1082 — установка максимальной частоты двигате-
ляШаг Отображение1. Нажмите клавишу для доступа к параметрам ![]()
 2. Нажимайте
2. Нажимайте ![]() до появления параметра Р1082
до появления параметра Р1082 ![]() 3. Нажмите клавишу для доступа к уровню
3. Нажмите клавишу для доступа к уровню ![]() 4. Нажмите клавишу для доступа к значению
4. Нажмите клавишу для доступа к значению ![]() 5. Нажимайте
5. Нажимайте ![]() и
и ![]() до установки значения
до установки значения ![]() 6. Нажимайте для возврата и записи значения
6. Нажимайте для возврата и записи значения ![]() 7. Нажмите клавишу
7. Нажмите клавишу![]() для возврата к параметру
для возврата к параметру ![]()
8. Нажмите клавишу ![]() для возврата к индикации установленного параметра
для возврата к индикации установленного параметра
Функция кнопки (Fn) базового пульта оператора
Использование кнопки Функции.
Кнопка Функция используется для просмотра информации о параметрах при-
вода. Для их просмотра должны быть выполнены следующие действия:
Из любого параметра, нажмите и удерживайте кнопку функции:
1. Дисплей изменится для индикации напряжения DC звена (обозначается d) .
2. Нажмите кнопку функции снова для индикации выходного тока (A).
3. Нажмите кнопку функции снова для индикации выходной частоты (Hz).
4. Нажмите кнопку функции снова для индикации выходного напряжения (обо-
значается o).
 5. Нажмите кнопку функции снова для индикации функции, выбранной для ото- бражения в P0005. (Если параметр P0005 установлен для индикации в одно из вышеупомянутых значений (3,4 или 5), то они не будут индицироваться).
5. Нажмите кнопку функции снова для индикации функции, выбранной для ото- бражения в P0005. (Если параметр P0005 установлен для индикации в одно из вышеупомянутых значений (3,4 или 5), то они не будут индицироваться).
Примечание
Дополнительные нажатия приведут к переключению отображения по кругу. Нажмите и удерживайте кнопку функции в любой точке в цикле для отображе- ния; номер параметра, с которого Вы начнете (например, r0000) и возможность возврата к этому отображению.
Функция прокрутки
Если пользователю требуется изменить значение параметра, то для увеличе- ния или уменьшения значения необходимо воспользоваться клавишами на BOP ![]() или
или ![]() соответственно.
соответственно.
Изменение отдельных цифр в значениях параметра
Для быстрого изменения значения параметра могут быть изменены отдельные отображаемые цифры путем выполняя следующих действий:
Убедитесь, что Вы находитесь на уровне изменения значения параметра
(см. «Изменение параметров с BOP»).
1. Нажмите ![]() (функциональную клавишу), которая приведет к миганию крайней правой цифры.
(функциональную клавишу), которая приведет к миганию крайней правой цифры. 2. Измените значение этой цифры нажатием на
2. Измените значение этой цифры нажатием на ![]() / .
/ .
3. Нажмите ![]() (функциональную клавишу) снова, что приведет к миганию следующей цифры.
(функциональную клавишу) снова, что приведет к миганию следующей цифры.
4. Выполняйте шаги 2 — 4 до тех пор, пока не будет показано требуемое значение. 5. Нажмите , чтобы выйти из уровня изменения значения параметра.
5. Нажмите , чтобы выйти из уровня изменения значения параметра.
Примечание
Функциональная клавиша может быть также использована для подтверждения сбоев.
Функция прокрутки
Если пользователю требуется изменить значение параметра, то для увеличе- ния или уменьшения значения необходимо воспользоваться клавишами на BOP ![]() или
или ![]() соответственно.
соответственно.
Изменение отдельных цифр в значениях параметра
Для быстрого изменения значения параметра могут быть изменены отдельные отображаемые цифры путем выполняя следующих действий:
Убедитесь, что Вы находитесь на уровне изменения значения параметра
(см. «Изменение параметров с BOP»).
1. Нажмите ![]() (функциональную клавишу), которая приведет к миганию крайней правой цифры.2. Измените значение этой цифры нажатием на
(функциональную клавишу), которая приведет к миганию крайней правой цифры.2. Измените значение этой цифры нажатием на ![]() / .
/ .
3. Нажмите ![]() (функциональную клавишу) снова, что приведет к миганию следующей цифры.
(функциональную клавишу) снова, что приведет к миганию следующей цифры.
4. Выполняйте шаги 2 — 4 до тех пор, пока не будет показано требуемое значение.5. Нажмите , чтобы выйти из уровня изменения значения параметра.
Примечание
Функциональная клавиша может быть также использована для подтверждения сбоев.
Функция перехода
Из любого параметра (rXXXX или PXXXX) кратким нажатием клавиши Fn, Вы немедленно перейдете на r0000, и, если требуется, затем изменить другой па- раметр. После возврата в r0000, нажатие клавиши Fn возвратит Вас к отправ- ной точке.
1 . ВВОД ПАРАМЕТРОВ ДВИГАТЕЛЯ И ЕГО ИДЕНТИФИКАЦИЯ
Перед началом работы внимательно изучить инструкцию по
эксплуатации преобразователя частоты !!
1 Этап. Сброс на заводские установки.
Если в ходе настройки преобразователя частоты (далее – ПЧ ) были введены ошибочные значения параметров и затруднителен их поиск и исправление , то рекомендуется осуществить сброс всех параметров на заводские настройки и повторить цикл параметрирования снова.
Для этой процедуры используются след. параметры:
- Р0003 =4 — уровень доступа к параметрам (экспертный уровень). При этом открывается доступ ко всем параметрам ПЧ
- Р0010=30 — разрешение на заводские настройки
- Р0970=1 — старт процесса сброса
2 Этап. Введение параметров двигателя. (Быстрый ввод в эксплуатацию)
Р0003 = 4 — уровень доступа к параметрам
Р0004 = 0 — фильтр параметров (все параметры)
Р0010 = 1 — быстрое параметрирование (начало процесса тестирования двигателя)
Р0100 = 0
Р0205 = 0 — работа с постоянным моментом
Р0300 = 1 — асинхронный двигатель, (АД)
Р0304 = 380 — номинальное напряжение двигателя , В
Р0305 = … — номинальный ток двигателя, А
Р0307 = … — номинальная мощность двигателя, кВт
Р0308 = … — cosφ двигателя
Р0310 = 50 , номинальная частота, Гц
Р0311 = … — Номинальная асинхронная скорость двигателя, об./мин ( с шильдика двигателя)
Р0320 = 0 — ток намагничивания (определяется автоматически в ходе тестирования)
Р0335 = 0 — самоохлаждение двигателя
Р0500 = 0 — тип нагрузки (постоянный момент)
Р0640 =170 — перегрузка двигателя по току (рекомендуется 150 -180), %
Р0700 =1 — выбор источника управляющих сигналов (1-пульт управления, 2- внешними
сигналами. После тестирования выставить 2)
Р1000 =3 — выбор источников задания частоты («3» — фиксированные частоты)
Р1080 =0 — минимальная частота, Гц
Р1082 =50 — максимальная частота, Гц
Р1120 = 2.1 — время разгона, с
Р1121 = 1.2 — время торможения, с
Р1135 = 0.4 — время аварийного останова, с
Р1300 = 20 — выбор режима управления — векторное управление без обр. связи
Р1500 = 0 — выбор источника задания момента
Р1910 = 1 — определение параметров двигателя ( при этом появляется код предупре-
ждения А0541 , что при последующей подаче команды «Пуск» начнется
измерение параметров двигателя
P1960 = 0 — оптимизация контроля скорости
Р3900 = 3 — Завершение быстрого ввода с расчетом двигателя (появится сигнал занятости
расчетами)
-Подождать , пока не закончится предварительный расчет
-Нажать кнопку Пуск (или подать внешнюю команду на пуск). При этом должны быть слышны характерные звуки в тестируемом двигателе.
-Подождать , пока закончится тестирование двигателя . По окончании тестирования дисплей будет отображать последний параметр.
-Приступить к редактированию остальных параметров.
Внимание : 1. Во время тестирования двигатель должен быть подключен к выходу частотного преобразователя. Если двигатель подключен через дополнительный контактор, то на время тестирования контактор нужно включить принудительно (или на время его зашунтировать).
2. На время тестирования отключить шкаф управления или цепи управления тормозом лебедки.
3. На время тестирования временно выставить : Р700 =1 (управление с пульта).
После тестирования выставить в «2» (терминал)!
4. Вернуть все временные изменения в цепях управления в исходное состояние
5. Переход к разрядам чисел при редактировании параметров осуществляется нажатием на клавишу « Fn » на пульте управления.
Список основных параметров для редактирования
Р003 =3 — уровень доступа к параметрам
Р004 =0 — фильтр параметров (все параметры)
Р100=0 — европейская система единиц (кВт, 50 Гц)
Р205=0 — режим использования ПЧ ( постоянный момент)
Р290=1 — реакция ПЧ на перегрузки (выход в аварию -отключение)
Р295=20 — задержка отключения вентилятора охлаждения
Р300=1 — тип двигателя (асинхронный)
Р304=380 (ном. напряжение двигателя )
Р305=…. (ном. ток двигателя, А)
Р306=….. (ном. мощность двигателя, кВт)
Р308=….. ( cos![]() двигателя )
двигателя )
Р310=50 ( ном. частота двигателя )
Р311=…. (Номинальная асинхронная скорость двигателя, об./мин)
Р335=0 — охлаждение двигателя (самоохлаждение)
Р500=0 — область применения ПЧ (привод с постоянным моментом)
Р610=2 — реакция на перегрев двигателя (предупреждение и выход в аварию – F0011)
Р640=170 — допустимая перегрузка двигателя по току (рекомендуется 150 -180), %
Р700=2 — выбор источника управляющих сигналов — терминал (при тестировании двигателя
временно выставить =1)
Р701=1 – функция входа №1 (направление вверх)
Р702=2 – функция входа №2 (направление вниз)
Р703=15 – функция входа №3 (фиксированная частота большой скорости)
Р704=99 – функция входа №4 (BICO-функции — расширенные функции с возможностью перехода
на 2-й набор времени разгона-торможения и фиксированная частота малой скорости)
Р705=0 – вход не используется
Р706=4 функция быстрого аварийного останова. На этот вход подано напряжение +24 в, когда нет обрыва цепи безопасности или нет условий для аварийного останова привода. При возникновении аварийной ситуации сигнал должен немедленно сниматься, тем самым формируя аварийный останов привода.
Р707=0 – вход не используется
Р708=0 – вход не используется
Р724=2 – время фильтрации входных сигналов (8.2 мс)
Р731=52:3 – функция выхода №1 (готовность привода и отсутствие аварий)
Р732=2811:0 – функция выхода №2 (синхронизация работы тормоза – выход внутреннего
контроллера — анализатора частоты и тока)
Р1000=3 – источник задания частот (фиксированные частоты)
Р1001=0 — задание частоты по входу №1 – нет
Р1002=0 — задание частоты по входу №2 – нет
Р1003=47 (задание частоты по входу №3 -частота для большой скорости . )
Р1004=9 (задание частоты по входу №4 -частота для малой скорости . )
Р1005…. по Р1015=0
Р1023=722.3 (BICO-задание частоты по входу №3)
Р1031=0 (сохранение частоты в панели управления –нет)
Р1060= 2.1 (второе время разгона),сек
Р1061=1.3 (второе время торможения — при переходе на малую скорость),сек
Р1080=0 – мин. частота
Р1082=50 –максимальная частота
Р1120= 2.1 (время разгона)
Р1121=1,2 (время торможения -на шунте ТО)
Р1124=722.3 (активация 2-го времени разгона-торможения по входу №3)
Р1130![]() 0,5 (1-й участок округления при разгоне), с
0,5 (1-й участок округления при разгоне), с
Р1131![]() 0,5 (2-й участок округления при разгоне), с
0,5 (2-й участок округления при разгоне), с
Р1132![]() 0.5 (1-й участок округления при торможении), с
0.5 (1-й участок округления при торможении), с
Р1133![]() 0.4 (2-й участок округления при торможении), с
0.4 (2-й участок округления при торможении), с
Р1134=1 (округление при обрыве задания –нет)
Р1135=0.4 (время торможения при аварийном останове),с
Р1210=1 (автоматический перезапуск –нет)
Р1215=1 (активация удержания током)
Р1216=0.3 (время удержания перед стартом),с
Р1217=1 (время удержания перед наложением тормоза),с
Р1237=5 (уровень динамического торможения -100%)
Р1240=0 (дезактивация контроллера звена постоянного тока)
Р1300=20 (векторный режим работы)
Р1470=7 ( пропорциональный коэффициент регулятора скорости – рекомендованные значения
лежат в области 5.5 — 8 . С увеличением этого коэффициента возрастает скорость реакции
привода на неоднородности момента на валу двигателя, но при этом могут возникать
возбуждения привода в определенных ситуациях. Оптимальное значение коэффициента
определяется экспериментально-по удовлетворительной работе привода в динамических
процессах)
Р1472=176 ( интегральный коэффициент регулятора скорости- рекомендованные значения лежат в
области 80 – 300. оказывает сглаживающее воздействие на регулирование скорости.
Обычно с увеличением пропорциональной части уменьшают интегральную часть.)
Р1570=110 ( коэффициент потокосцепления)
Р1610=200 (увеличение момента на сверхнизких частотах)
Р1611=150 (увеличение момента при разгоне)
Р1755=3 (частота перехода управления на векторную модель)
Р1756=50 (гистерезис частоты перехода на векторную модель)
Р1758=100 (минимальное время перехода с токовой модели на векторную модель)
Р1800=6 ( ШИМ-частота работы транзисторных ключей ПЧ)
P2106=2829:0 (источник формирования искусственной аварии-выход логического элемента
NOT1)
Р2150=0 (гистерезис контроля частоты)
Р2155 =0.03 (контрольная частота №1)
Р2156=0 (задержка после определения контрольной частоты)
Р2157=0.03 (контрольная частота №2)
Р2158=0 (задержка после определения контрольной частоты)
Р2159=0.03 (контрольная частота №3)
Р2160=0 (задержка после определения контрольной частоты)
P2170=5 (контрольный уровень тока, в % от номинального тока двигателя)
Р2180=100 (задержка выдачи кода аварии при потере нагрузки, мс)
Р2800=1 (активация встроенного логического контроллера)
Р2801 ![]() in 000 =1 активация логического элемента AND1
in 000 =1 активация логического элемента AND1
![]() in 009 =1 активация логического элемента NOT1
in 009 =1 активация логического элемента NOT1
P2810 ![]() in 000=53:3 — вход логического элемента AND1(контрольный уровень тока)
in 000=53:3 — вход логического элемента AND1(контрольный уровень тока)
![]() in 001=2198:1 — вход логического элемента AND1 (контрольная частота №2)
in 001=2198:1 — вход логического элемента AND1 (контрольная частота №2)
P2828=2197:B (формирование аварии при потере нагрузки-выход логического элемента NOT1)
Примечание: Все значения частот и времени разгона-торможения справедливы только для расстояний между шунтами согласно паспортным данным и длине шунта точной остановки -20 см.
Предложите, как улучшить StudyLib
(Для жалоб на нарушения авторских прав, используйте
другую форму
)
Ваш е-мэйл
Заполните, если хотите получить ответ
Оцените наш проект
1
2
3
4
5