
Документация на популярный китайский частотник в хорошем качестве…
I suggest you those electronic manuals for Huanyang Inverter in good quality…
(Note: this manual is universal and suitable for all HY Series.)
- I have scanned original «Instruction Manual» for «Huanyang Inverter» and intentionally not recognized text, to save original design fine and clear. Though, OCR for full text searching have provided! Provided both PDF (better quality) and DjVu (reduced size) files in archive:
Huanyang Inverter Instruction (eng).300dpi.67pages.OCR (DjVu and PDF)
- See also, another good and appropriate documents found in Internet (here and here):
HUAN YANG — HY Series Inverter User Manual (Edited by CNCDIY.ORG) [27 June 2010].pdf
and
Huanyang Inverter Instruction (eng).67pages.Original electronic quality but without OCR.pdf
Настройки для Частотника «Huanyang VFD Huanyang HY02D223B 2.2Kw» под Шпиндель «GDZ-23 (2.2kW, 400Hz, 3фазный, с водяным охлаждением)»
Частичный перевод документации с комментариями…
| Параметр | Моя установка | Назначение | Возможные значения | Заводская установка |
| PD000 | 1 | Сервис: Залочить параметры от последующего случайного изменения (Примечание: установить только после окончания настройки) |
0-изменяемые 1-залочить |
0 |
| PD001 | 0 | Интерфейс: Откуда осуществляется Управление Старт/Стоп? | 0:Встроенная Панель, 1:External terminal, 2:Communication port |
0 |
| PD002 | 1 | Интерфейс: Откуда осуществляется Установка рабочей Частоты/Скорости?
Внимание: для использования (аналогового) потенциометра на передней панели — |
0:Встроенная Панель (Цифровое управление! только кнопочками больше/меньше, после включения START), 1:External terminal (Аналоговое управление! в т.ч. Потенциометром на встроенной панели), 2:Communication port RS485 |
0 |
| PD003 | 100 | Профиль «Скорость №1» (чаще всего используемая предустановка) Используется только при «Цифровом управлении » как Начальная частота, на которую выводится двигатель сразу после включения, при «Цифровом управлении со Встроенной панели». Также используется в режиме «Multi-Speed Operation» в качестве «Frequency 1» (это когда программируется 1..8 или 1..16 предустановленных частот/скоростей, и между ними последовательно переключаешься). Но в режиме «Аналогового управления» — PD003 не используется! т.к. там применяется абсолютная установка по уровню сигнала. |
(0.00~400.00 Hz) Примечание: здесь, и далее в параметрах Частотника (VFD) устанавливается «Частота», но итоговая «Скорость» вращения ротора мотора зависит от неё пропорционально и регулируется опосредованно… |
* |
| PD004 | 400 | «Base Frequency» — это «номинальная частота» «номинального напряжения», как указано на шильдике Мотора. Очень Важно: установи это значение правильно! Т.к. от «частоты питающего напряжения» зависит «индуктивное сопротивление обмоток двигателя». Поэтому, например, если движок расчитан на 400Гц питание (авиационный стандарт), но установишь здесь 50Гц (промышленная частота), то на обмотки двигателя, фактически, пойдёт ток в 8 раз больше номинального, и спалит нафиг! |
(0.01~400.00 Hz) | 50 |
| Раздел: основная настройка физических величин управления мотором (зависимость выходного Напряжения от требуемой Частоты) | ||||
| PD005 | 400 | Защита: Максимальная выходная Частота формируемая частотником — т.е. настройка максимального предела Скорости Разгона двигателя. (Предназначено, чтобы ограничивать Скорости меньше номинального максимума… Интересно, а можно ли форсировать движок больше номинала?) |
(50.00~400.00 Hz) | 50 |
| PD006 | 2,5** | Промежуточная Частота (установка характерной точки на «графике разгона», до которой идёт фаза «стартового разгона», которая может быть характеризоваться повышенным или пониженным «ростом напряжения»… Примечание: в фазе «стартового разгона» включён механизм компенсации вращательного момента (torque compensation) на низких скоростях! |
(0.01~400.00 Hz) | 2,5/3,0 |
| PD007 | 0.50* | Минимальная Частота (начальная точка на графике разгона) | (0.01~20.00 Hz) | 0,5 |
| PD008 | 220 | Защита: Максимальное выходное Напряжение формируемое частотником — установить в «номинальное напряжение» указаное на шильдике Мотора. |
0.1V—* | 220 / 380V |
| PD009 | 15** | Промежуточное Напряжение (значение напряжения в «характерной точке» на «графике разгона») | 0.15-10.0V | 13 |
| PD010 | 8* | Минимальное Напряжение (начальная точка на графике разгона) | (0.1~50.0V) | 6,5 |
| PD011 | 100 | Защита: Нижний предел выходной Частоты. Внимание: для китайских шпинделей ниже 100Гц устанавливать нельзя! (Это особенно важно для Шпинделей с воздушным охлаждением.) |
0 | |
| PD013 | Если накосячил в настройке параметров? То можно автоматически всё «Сбросить в Заводские установки» — для этого пропиши в эту ячейку число =08 и перезагрузи Частотник по питанию. (Примечание: параметры должны быть разлочены PD000=0.) |
00~10 Parameter Reset = 08:Restore factory setting. No other function. |
8 | |
| Раздел: настройка режимов раскручивания и остановки мотора. | ||||
| PD014 | 5 | Профиль «Время Разгона №1» (от минимальной частоты до максимальной) | (0.1~6500.0 Sec) | 10 |
| PD015 | 5 | Профиль «Время Торможения №1» (по умолчанию, работает Профиль №1) | (0.1~6500.0 Sec) | 10 |
| PD016 | Профиль «Время Разгона №2» (остальные профили активируются через PLC) | (0.1~6500.0 Sec) | ||
| PD017 | Профиль «Время Торможения №2» | (0.1~6500.0 Sec) | ||
| PD018 | Профиль «Время Разгона №3» | (0.1~6500.0 Sec) | ||
| PD019 | Профиль «Время Торможения №3» | (0.1~6500.0 Sec) | ||
| PD020 | Профиль «Время Разгона №4» | (0.1~6500.0 Sec) | ||
| PD021 | Профиль «Время Торможения №4» | (0.1~6500.0 Sec) | ||
| PD023 | 0 | Реверс доступен? (Примечание: Отключение реверса уберегает от ошибки оператора…) |
0:Запрещён; 1:Разрешён |
1 |
| PD024 | 1 | Отключить кнопку STOP на «Втроенной Панели»? (Примечание: актуально только при PD001=1или2, т.е. в режимах внешнего управления — когда старт/стоп управляется извне, и чтобы кто-то локально не нажал кнопарь на инверторе и не закосячил процесс…) |
0:STOP отключён 1:STOP работает |
1 |
| PD025 | Starting Mode 0: Предположим, управляемый мотор прикреплён к ветряку или ещё какому-нибудь механизму, который может его раскручивать в произвольном направлении… Тогда, при запуске мотора может оказаться, что он уже вращается в обратном направлении?! И будет большой резкий рывок на механику и по току — что-то может сломаться… Чтобы гарантировать от этого, применяется «предварительное принудительное торможение двигателя постоянным током» (режим PD25=0), на время PD29 сек. А уж потом — запуск… 1: Предположим, к мотору прикреплён очень инертный маховик. Да и бывает так, что инвертер включили в сеть, когда маховик уже раскручен — т.о. чтобы его предварительно остановить нужно много времени и энергии, да и не нужно это — потому что потом опять его надо раскручивать… Но Инвертер может просканировать на какой примерно частоте сейчас крутится мотор и уже от этой частоты его крутить. (Настройка «сканера» — в параметрах PD32/PD33…) |
0:Start from Starting Frequency (начинать раскручивание мотора только от минимальной частоты, предварительно остановив мотор постоянным током если задан параметр PD29)1:Frequency track start (определить на какой частоте вращается мотор и пристроиться походу его докручивать) |
0 | |
| PD026 | Stopping Mode
Важно понимать: нельзя использовать функцию принудительного торможения (DC Braking) без нужны — это не только лишних расход электроэнергии, но и значительно перегревает мотор! Также, для нетребовательной нагрузки, может иметь смысл применять режим тупо инерционного останова (1:Coasting stop)… Или же, мотор может использоваться для периодического подкручивания большой инерционной нагрузки: комбинируя «Frequency track start» + «Coasting stop»… |
0:Decelerating stop (при получении команды СТОП, инвертер постепенно занижает выходную частоту до минимальной, чтобы замедлить врещение мотора… а затем ещё и тормозит постоянным током, если включён параметр PD30) 1:Coasting stop (при получении команды СТОП, инвертер тупо снимает выходное питание — и мотор уже сам по себе докручивается до останова по инерции) |
0 | |
| PD027 | Starting Frequency (От этой частоты Инвертер будет раскручивать мотор, при PD25=0.) |
0.1~10.0 Hz | 0,5 | |
| PD028 | Stopping Frequency (До этой частоты Инвертер будет останавливать мотор, при PD26=0.) |
0.1~10.0 Hz | 0,5 | |
| PD029 | DC Braking Time at Start — длительность времени предварительного торможения мотора постоянным током, в секундах, перед его последующим запуском. | 0:функция торможения отключена 0.02-5 Sec |
0 | |
| PD030 | DC Braking Time at Stop — длительность времени торможения мотора постоянным током, в секундах, после его останова (полезно для точного позиционирования) | 0:функция торможения отключена 0-25 Sec |
0 | |
| PD031 | DC Braking Voltage Level Рекомендуется: последовательно увеличивать этот показатель от нуля, до достижения нужного тормозного усилия. Определяется экспериментально… |
0-20% (где: 100% напряжение — это напряжение на максимальной частоте вращения мотора) |
2 | |
| PD032 | Frequency Track Time (время торможения постоянным током) | 0,12-10 сек | 5 | |
| PD033 | Current Level for Frequency Track Предел тока потребления мотора, применяемый при Сканировании текущей частоты вращения (используется при PD25=1). Пояснение: Инвертер пытается крутить мотор на разной частоте, начиная от максимальной, и если ток превышается предельный PD33, то это значит неправильная частота — нужно взять меньше… И так, последовательным перебором, находит приемлимую частоту. |
0-200% | 150 | |
| PD034 | Inverter Track Time Up/Down Шаг итерации, применяемый при сканировании частоты. (Рекомендация: для маломощных моторов следует мельчить шаг, а для больших моторов — наоборот, увеличивать шаг.) |
0,5 | ||
| Раздел: настройка цифровых входов управления (это пока не нужно) | ||||
| Раздел: настройка аналоговых входов управления (актуально, т.к. используется потенциметр на передней панели) | ||||
| PD070 | 1 | Выбор характеристик «Аналогового Входа» для «внешнего управления» скоростью вращения… | 0 = 0-10V 1 = 0-5V (используй это для потенциометра на передней панели) 2 = 0-20мА, 3=4-20мА, 4=комбинированный… |
0 |
| PD071 | Скорость реакции Инвертера на изменение входного аналогового сигнала | 0-50 (больше значение — медленнее реакция, т.е. это типа задержка) |
20 | |
| PD072 | 400 | Higher Analog Frequency (диапазоны регулировки выходной частоты от входного сигнала — верхняя граница) | 0-400 | 50 |
| PD073 | 100 | Lower Analog Frequency (диапазоны регулировки выходной частоты от входного сигнала — нижняя граница) | 0 | |
| PD074 | Направление наклонной, при максимальной частоте | 0=положительный наклон (фронт) 1=отрицательный наклон (спад) |
0 | |
| PD075 | Направление наклонной, при минимальной частоте | 0 | ||
| PD076 | ||||
| Раздел: микропрограммное управление (PLC) режимом скорости | ||||
| PD077 | Запоминать ли в энергонезависимой памяти текущее значение параметра, подстраиваемое цифровыми кнопками UP/DOWN? | 0=не запоминать 1=запоминать |
0 | |
| PD078 | Дискретность регулировки скорости цифровыми кнопками UP/DOWN | 0=по сотым Герца 1=по десятым Герца |
0 | |
| PD080 | 0 | PLC Operation
Здесь, обычно, нужно использовать PD80=0 (отключить фичу). Но можно использовать и продвинутые функции… Например, при PD80=4 — можно запрограммировать последовательность из 16 участков Скорость/Таймер (в т.ч. и реверсных участков), а потом её «проиграть» по внешнему сигналу. |
0=Normal operation (микропрограммное управление отключено — используется оперативное управление непосредственно от входных сигналов) 1-5 и другие режимы, типа Multi-speed; управляемые с Внутренней Панели или Внешними терминалами и т.п. |
0 |
| Раздел: тонкие настройки режимных параметров (не лезь сюда) | ||||
| Раздел: подстройка отображения на дисплее (примерный расчёт реальной скорости врашения ротора мотора, в RPM) | ||||
| PD141 | 220 | Номинальное напряжение мотора, указаное на шильдике. | 220/380 | |
| PD142 | 8 | Номинальный ток мотора, указаное на шильдике. Важно: этот параметр используется ещё как Защита мотора от перегрузки! |
2200W / 220V = 10A ? Нет, на шильдике мотора = 8А |
|
| PD143 | 2 | Количество полюсов мотора, указаное на шильдике. (Примечание: у китайских высокоскоростных Шпинделей = 2 полюса ?) |
0-10 | 4 |
| PD144 | 3000 | Обороты двигателя, при выходной частоте 50Гц (нужны только для индикации) (Например: если 3000rpm при 50Гц, то это 24000rpm при 400Гц…) |
0-9999 | 1440 |
| Раздел: продвинутая настройка физических величин управления мотором (лучше ничего не трогать) | ||||
| Раздел: возобновление после внезапного пропадения питания | ||||
| Раздел: дальше вообще какая-то жесть пошла (подстройка констант из теории «векторного управления») | ||||
| Раздел: настройка интерфейса RS-485 | ||||
| Раздел: мониторинг системных параметров |
Скачать полную версию таблицы:
Настройки для Частотника Huanyang VFD Huanyang HY02D223B 2.2Kw под Шпиндель 2.2кВт 400Гц.xls
Документация на популярный китайский частотник в хорошем качестве…
I suggest you those electronic manuals for Huanyang Inverter in good quality…
(Note: this manual is universal and suitable for all HY Series.)
- I have scanned original «Instruction Manual» for «Huanyang Inverter» and intentionally not recognized text, to save original design fine and clear. Though, OCR for full text searching have provided! Provided both PDF (better quality) and DjVu (reduced size) files in archive:
Huanyang Inverter Instruction (eng).300dpi.67pages.OCR (DjVu and PDF)
- See also, another good and appropriate documents found in Internet (here and here):
HUAN YANG — HY Series Inverter User Manual (Edited by CNCDIY.ORG) [27 June 2010].pdf
and
Huanyang Inverter Instruction (eng).67pages.Original electronic quality but without OCR.pdf
Настройки для Частотника «Huanyang VFD Huanyang HY02D223B 2.2Kw» под Шпиндель «GDZ-23 (2.2kW, 400Hz, 3фазный, с водяным охлаждением)»
Частичный перевод документации с комментариями…
| Параметр | Моя установка | Назначение | Возможные значения | Заводская установка |
| PD000 | 1 | Сервис: Залочить параметры от последующего случайного изменения (Примечание: установить только после окончания настройки) |
0-изменяемые 1-залочить |
0 |
| PD001 | 0 | Интерфейс: Откуда осуществляется Управление Старт/Стоп? | 0:Встроенная Панель, 1:External terminal, 2:Communication port |
0 |
| PD002 | 1 | Интерфейс: Откуда осуществляется Установка рабочей Частоты/Скорости?
Внимание: для использования (аналогового) потенциометра на передней панели — |
0:Встроенная Панель (Цифровое управление! только кнопочками больше/меньше, после включения START), 1:External terminal (Аналоговое управление! в т.ч. Потенциометром на встроенной панели), 2:Communication port RS485 |
0 |
| PD003 | 100 | Профиль «Скорость №1» (чаще всего используемая предустановка) Используется только при «Цифровом управлении » как Начальная частота, на которую выводится двигатель сразу после включения, при «Цифровом управлении со Встроенной панели». Также используется в режиме «Multi-Speed Operation» в качестве «Frequency 1» (это когда программируется 1..8 или 1..16 предустановленных частот/скоростей, и между ними последовательно переключаешься). Но в режиме «Аналогового управления» — PD003 не используется! т.к. там применяется абсолютная установка по уровню сигнала. |
(0.00~400.00 Hz) Примечание: здесь, и далее в параметрах Частотника (VFD) устанавливается «Частота», но итоговая «Скорость» вращения ротора мотора зависит от неё пропорционально и регулируется опосредованно… |
* |
| PD004 | 400 | «Base Frequency» — это «номинальная частота» «номинального напряжения», как указано на шильдике Мотора. Очень Важно: установи это значение правильно! Т.к. от «частоты питающего напряжения» зависит «индуктивное сопротивление обмоток двигателя». Поэтому, например, если движок расчитан на 400Гц питание (авиационный стандарт), но установишь здесь 50Гц (промышленная частота), то на обмотки двигателя, фактически, пойдёт ток в 8 раз больше номинального, и спалит нафиг! |
(0.01~400.00 Hz) | 50 |
| Раздел: основная настройка физических величин управления мотором (зависимость выходного Напряжения от требуемой Частоты) | ||||
| PD005 | 400 | Защита: Максимальная выходная Частота формируемая частотником — т.е. настройка максимального предела Скорости Разгона двигателя. (Предназначено, чтобы ограничивать Скорости меньше номинального максимума… Интересно, а можно ли форсировать движок больше номинала?) |
(50.00~400.00 Hz) | 50 |
| PD006 | 2,5** | Промежуточная Частота (установка характерной точки на «графике разгона», до которой идёт фаза «стартового разгона», которая может быть характеризоваться повышенным или пониженным «ростом напряжения»… Примечание: в фазе «стартового разгона» включён механизм компенсации вращательного момента (torque compensation) на низких скоростях! |
(0.01~400.00 Hz) | 2,5/3,0 |
| PD007 | 0.50* | Минимальная Частота (начальная точка на графике разгона) | (0.01~20.00 Hz) | 0,5 |
| PD008 | 220 | Защита: Максимальное выходное Напряжение формируемое частотником — установить в «номинальное напряжение» указаное на шильдике Мотора. |
0.1V—* | 220 / 380V |
| PD009 | 15** | Промежуточное Напряжение (значение напряжения в «характерной точке» на «графике разгона») | 0.15-10.0V | 13 |
| PD010 | 8* | Минимальное Напряжение (начальная точка на графике разгона) | (0.1~50.0V) | 6,5 |
| PD011 | 100 | Защита: Нижний предел выходной Частоты. Внимание: для китайских шпинделей ниже 100Гц устанавливать нельзя! (Это особенно важно для Шпинделей с воздушным охлаждением.) |
0 | |
| PD013 | Если накосячил в настройке параметров? То можно автоматически всё «Сбросить в Заводские установки» — для этого пропиши в эту ячейку число =08 и перезагрузи Частотник по питанию. (Примечание: параметры должны быть разлочены PD000=0.) |
00~10 Parameter Reset = 08:Restore factory setting. No other function. |
8 | |
| Раздел: настройка режимов раскручивания и остановки мотора. | ||||
| PD014 | 5 | Профиль «Время Разгона №1» (от минимальной частоты до максимальной) | (0.1~6500.0 Sec) | 10 |
| PD015 | 5 | Профиль «Время Торможения №1» (по умолчанию, работает Профиль №1) | (0.1~6500.0 Sec) | 10 |
| PD016 | Профиль «Время Разгона №2» (остальные профили активируются через PLC) | (0.1~6500.0 Sec) | ||
| PD017 | Профиль «Время Торможения №2» | (0.1~6500.0 Sec) | ||
| PD018 | Профиль «Время Разгона №3» | (0.1~6500.0 Sec) | ||
| PD019 | Профиль «Время Торможения №3» | (0.1~6500.0 Sec) | ||
| PD020 | Профиль «Время Разгона №4» | (0.1~6500.0 Sec) | ||
| PD021 | Профиль «Время Торможения №4» | (0.1~6500.0 Sec) | ||
| PD023 | 0 | Реверс доступен? (Примечание: Отключение реверса уберегает от ошибки оператора…) |
0:Запрещён; 1:Разрешён |
1 |
| PD024 | 1 | Отключить кнопку STOP на «Втроенной Панели»? (Примечание: актуально только при PD001=1или2, т.е. в режимах внешнего управления — когда старт/стоп управляется извне, и чтобы кто-то локально не нажал кнопарь на инверторе и не закосячил процесс…) |
0:STOP отключён 1:STOP работает |
1 |
| PD025 | Starting Mode 0: Предположим, управляемый мотор прикреплён к ветряку или ещё какому-нибудь механизму, который может его раскручивать в произвольном направлении… Тогда, при запуске мотора может оказаться, что он уже вращается в обратном направлении?! И будет большой резкий рывок на механику и по току — что-то может сломаться… Чтобы гарантировать от этого, применяется «предварительное принудительное торможение двигателя постоянным током» (режим PD25=0), на время PD29 сек. А уж потом — запуск… 1: Предположим, к мотору прикреплён очень инертный маховик. Да и бывает так, что инвертер включили в сеть, когда маховик уже раскручен — т.о. чтобы его предварительно остановить нужно много времени и энергии, да и не нужно это — потому что потом опять его надо раскручивать… Но Инвертер может просканировать на какой примерно частоте сейчас крутится мотор и уже от этой частоты его крутить. (Настройка «сканера» — в параметрах PD32/PD33…) |
0:Start from Starting Frequency (начинать раскручивание мотора только от минимальной частоты, предварительно остановив мотор постоянным током если задан параметр PD29)1:Frequency track start (определить на какой частоте вращается мотор и пристроиться походу его докручивать) |
0 | |
| PD026 | Stopping Mode
Важно понимать: нельзя использовать функцию принудительного торможения (DC Braking) без нужны — это не только лишних расход электроэнергии, но и значительно перегревает мотор! Также, для нетребовательной нагрузки, может иметь смысл применять режим тупо инерционного останова (1:Coasting stop)… Или же, мотор может использоваться для периодического подкручивания большой инерционной нагрузки: комбинируя «Frequency track start» + «Coasting stop»… |
0:Decelerating stop (при получении команды СТОП, инвертер постепенно занижает выходную частоту до минимальной, чтобы замедлить врещение мотора… а затем ещё и тормозит постоянным током, если включён параметр PD30) 1:Coasting stop (при получении команды СТОП, инвертер тупо снимает выходное питание — и мотор уже сам по себе докручивается до останова по инерции) |
0 | |
| PD027 | Starting Frequency (От этой частоты Инвертер будет раскручивать мотор, при PD25=0.) |
0.1~10.0 Hz | 0,5 | |
| PD028 | Stopping Frequency (До этой частоты Инвертер будет останавливать мотор, при PD26=0.) |
0.1~10.0 Hz | 0,5 | |
| PD029 | DC Braking Time at Start — длительность времени предварительного торможения мотора постоянным током, в секундах, перед его последующим запуском. | 0:функция торможения отключена 0.02-5 Sec |
0 | |
| PD030 | DC Braking Time at Stop — длительность времени торможения мотора постоянным током, в секундах, после его останова (полезно для точного позиционирования) | 0:функция торможения отключена 0-25 Sec |
0 | |
| PD031 | DC Braking Voltage Level Рекомендуется: последовательно увеличивать этот показатель от нуля, до достижения нужного тормозного усилия. Определяется экспериментально… |
0-20% (где: 100% напряжение — это напряжение на максимальной частоте вращения мотора) |
2 | |
| PD032 | Frequency Track Time (время торможения постоянным током) | 0,12-10 сек | 5 | |
| PD033 | Current Level for Frequency Track Предел тока потребления мотора, применяемый при Сканировании текущей частоты вращения (используется при PD25=1). Пояснение: Инвертер пытается крутить мотор на разной частоте, начиная от максимальной, и если ток превышается предельный PD33, то это значит неправильная частота — нужно взять меньше… И так, последовательным перебором, находит приемлимую частоту. |
0-200% | 150 | |
| PD034 | Inverter Track Time Up/Down Шаг итерации, применяемый при сканировании частоты. (Рекомендация: для маломощных моторов следует мельчить шаг, а для больших моторов — наоборот, увеличивать шаг.) |
0,5 | ||
| Раздел: настройка цифровых входов управления (это пока не нужно) | ||||
| Раздел: настройка аналоговых входов управления (актуально, т.к. используется потенциметр на передней панели) | ||||
| PD070 | 1 | Выбор характеристик «Аналогового Входа» для «внешнего управления» скоростью вращения… | 0 = 0-10V 1 = 0-5V (используй это для потенциометра на передней панели) 2 = 0-20мА, 3=4-20мА, 4=комбинированный… |
0 |
| PD071 | Скорость реакции Инвертера на изменение входного аналогового сигнала | 0-50 (больше значение — медленнее реакция, т.е. это типа задержка) |
20 | |
| PD072 | 400 | Higher Analog Frequency (диапазоны регулировки выходной частоты от входного сигнала — верхняя граница) | 0-400 | 50 |
| PD073 | 100 | Lower Analog Frequency (диапазоны регулировки выходной частоты от входного сигнала — нижняя граница) | 0 | |
| PD074 | Направление наклонной, при максимальной частоте | 0=положительный наклон (фронт) 1=отрицательный наклон (спад) |
0 | |
| PD075 | Направление наклонной, при минимальной частоте | 0 | ||
| PD076 | ||||
| Раздел: микропрограммное управление (PLC) режимом скорости | ||||
| PD077 | Запоминать ли в энергонезависимой памяти текущее значение параметра, подстраиваемое цифровыми кнопками UP/DOWN? | 0=не запоминать 1=запоминать |
0 | |
| PD078 | Дискретность регулировки скорости цифровыми кнопками UP/DOWN | 0=по сотым Герца 1=по десятым Герца |
0 | |
| PD080 | 0 | PLC Operation
Здесь, обычно, нужно использовать PD80=0 (отключить фичу). Но можно использовать и продвинутые функции… Например, при PD80=4 — можно запрограммировать последовательность из 16 участков Скорость/Таймер (в т.ч. и реверсных участков), а потом её «проиграть» по внешнему сигналу. |
0=Normal operation (микропрограммное управление отключено — используется оперативное управление непосредственно от входных сигналов) 1-5 и другие режимы, типа Multi-speed; управляемые с Внутренней Панели или Внешними терминалами и т.п. |
0 |
| Раздел: тонкие настройки режимных параметров (не лезь сюда) | ||||
| Раздел: подстройка отображения на дисплее (примерный расчёт реальной скорости врашения ротора мотора, в RPM) | ||||
| PD141 | 220 | Номинальное напряжение мотора, указаное на шильдике. | 220/380 | |
| PD142 | 8 | Номинальный ток мотора, указаное на шильдике. Важно: этот параметр используется ещё как Защита мотора от перегрузки! |
2200W / 220V = 10A ? Нет, на шильдике мотора = 8А |
|
| PD143 | 2 | Количество полюсов мотора, указаное на шильдике. (Примечание: у китайских высокоскоростных Шпинделей = 2 полюса ?) |
0-10 | 4 |
| PD144 | 3000 | Обороты двигателя, при выходной частоте 50Гц (нужны только для индикации) (Например: если 3000rpm при 50Гц, то это 24000rpm при 400Гц…) |
0-9999 | 1440 |
| Раздел: продвинутая настройка физических величин управления мотором (лучше ничего не трогать) | ||||
| Раздел: возобновление после внезапного пропадения питания | ||||
| Раздел: дальше вообще какая-то жесть пошла (подстройка констант из теории «векторного управления») | ||||
| Раздел: настройка интерфейса RS-485 | ||||
| Раздел: мониторинг системных параметров |
Скачать полную версию таблицы:
Настройки для Частотника Huanyang VFD Huanyang HY02D223B 2.2Kw под Шпиндель 2.2кВт 400Гц.xls
Т13-750W-v1 частотный преобразователь. Паспорт (русский яз.) (pdf)
От
квершлаг
Паспорт на преобразователь частоты Т13-750W-v1. Инструкция на русском языке.
46 раз скачали
Обновлено 17.11.2022 08:02
![]()
YC580/680-1R5G-4 частотный преобразователь Инструкция по настройке (pdf)
От
sellho
Китайский векторный частотный преобразователь YC серия 580/680-1R5G-4 с функцией простого ПЛК, 0-500 Гц, 1.5 кВт. Инструкция по настройке.
14 раз скачали
Обновлено 04.11.2022 08:29
![]()
NFlixin 9600 (он же EcoGoo 9600) высокопроизводительный векторный инвертор. Паспорт (русский яз.) (pdf)
От
Loro
Инструкция по эксплуатации на Высокопроизводительный векторный инвертор серии 9600 NFlixin. Язык русский.
66 раз скачали
Обновлено 12.12.2022 14:32
Отправлено 17.08.2022 18:27
NFlixin (EcoGoo) 9600 Russian manual
От
ReXmiLL
Объединенная версия подключения ЧП NFlixin (он же EcoGoo) серии 9600, мощностью 1,5 кВт с несъемной панелью.
273 раза скачали
Отправлено 17.05.2022 13:38
Hitachi WJ200 частотный преобразователь. Паспорт
От
SergeiKl
Руководство по эксплуатации на Частотный преобразователь Hitachi WJ200.
6 раз скачали
Обновлено 24.02.2022 07:59
Частотный преобразователь T13-750W-12-H — дополнение
От
chuk011
В исходном файле есть ошибки, допущенные при переводе с китайского оригинала в разделе «7. Настройки параметров». Представлен мой перевод с китайского оригинала.
81 раз скачали
Обновлено 07.02.2022 17:12
Частотный преобразователь T13-750W-12-H
От
Владимир Светлый
Частотный преобразователь T13-750W-12-H 750 Вт, 220 В.
Компактный и простой преобразователь частоты для управления трехфазным двигателем. Оптимальное соотношение функциональности, простоты настройки и работы. Для управления электродвигателем ПЧ использует скалярное управление V/F-кривой, несущая частота 8 кГц. Диапазон управления выходной частотой — от 1 Гц до 99 Гц. ПЧ работает с трехфазными двигателями при подключении «треугольником» — на 220 В. На входе ПЧ питание однофазное 220 В. Панельное исполнение, монтаж на дверцу шкафа управления, компактные размеры корпуса.
175 раз скачали
Обновлено 07.02.2022 17:02
![]()
XSY-AT1 частотный преобразователь. Паспорт (русский яз.)
От
Rapid 77
XSY-AT1 частотный преобразователь. Инструкция на русском языке
89 раз скачали
Обновлено 14.12.2021 15:02
![]()
Fulu-Electric FL-J2, он же hs100, hs200, IDS-Drive M402T2B
От
X-Shadow
инструкция по эксплуатации (User Manual) Fulu-Electric FL-J2, он же hs100, hs200, IDS-Drive M402T2B
Именно версия с 3х (трехсимвольным) дисплеем. Язык: китай., англ., рус.
30 раз скачали
Обновлено 30.07.2021 07:42
Toshiba Tosvert VF-P7 частотный преобразователь, инвертор общего применения. Паспорт
От
rom2555
Высокопроизводительный инвертор общего применения Toshiba Tosvert VF-P7
Инструкция к частотнику
6 раз скачали
Обновлено 14.06.2021 14:52
Плата реле для частотника
От
darkstar
Плата под реле G5V-2 для частотника.
Для работы с нефиксируемыми кнопками.
Схема в sPlan 7.0
Печатная плата в Sprint Layout 6.0
G-проект в G2G GGEasy ver 1928
G-код для Candle Ver.1.1.8
9 раз скачали
Обновлено 09.04.2021 06:09
XSY-AT1 частотный преобразователь, Китай. Паспорт (англ.яз.)
От
darkstar
Инструкция на китайский частотник XSY-AT1. Английский язык
Похожий файл
59 раз скачали
Обновлено 08.04.2021 14:56
Частотный преобразователь серии 9100. Инструкция на русском
От
Юрик К
Преобразователь частоты NFlixin 9100-1T3-00220M и подобные, серии 9100. Инструкция. Перевод с английского мой. Прошу тех, кто может, дополнять и исправлять, если есть неточности.
1 154 раза скачали
Обновлено 26.01.2021 08:10
![]()
ATLAS VFD-S частотный преобразователь. Паспорт
От
Miha_Y
Инструкция на частотный преобразователь ATLAS VFD-S. Частотник с Али от EARU
109 раз скачали
Обновлено 14.01.2021 11:53
![]()
Metronix ARS-560/8 и 315/10 AC сервоусилитель. Паспорт (немецкий яз.)
От
NBV(SPB)
Набор документации, в основном на немецком языке.
Скачан с официального сайта производителя. Сейчас том сайте этих документов уже не найти.
Servo Positioning Controller ARS-310/5(UL) ARS-310/10
Metronix Drive Control (MDC) Programmierhandbuch
Digital servo controller ARS 560
PROFIBUS-DP Produkthandbuch
CANopen Produkthandbuch
20 раз скачали
Обновлено 25.12.2020 08:11
Mitsubishi Electric частотные приводы. Паспорт
От
romanovgenry
Документация на частотные привода Mitsubishi Electric.
113 раза скачали
Обновлено 14.07.2020 10:04
Huanyang P-2 series частотный преобразователь. Паспорт (русский яз.)
От
Diiemmon
Инструкция на русском частотного преобразователя Huanyang P-2 series. Перевод машинный, отредактированный.
Р2(А)-0R7G1(Z)
Р2(А)-1R5G1(Z)
Р2(А)-2R2G1(Z)
Р2(А)-0R7G2(Z)
Р2(А)-1R5G2(Z)
Р2(А)-2R2G2(Z)
Р2(А)-0R7G3(Z)
Р2(А)-1R5G3(Z)
Р2(А)-2R2G3(Z)
Р2(А)-4R0G3(Z)
190 раз скачали
Обновлено 28.04.2020 13:45
![]()
Таблица программирования частотников micro с Алиэкспресса
От
131072
Таблица программирования частотников «micro» с Али. Качество отличное, не перевод google translate.
Micro frequency converter programming manual.
289 раз скачали
Обновлено 13.03.2020 08:01
Сервопривод BLII-D, частотные преобразователи VACII, VACIII фирмы OKUMA. Паспорт
От
GuntisK
Мануал на сервопривод BLII-D, частотные преобразователи VACII, VACIII фирмы OKUMA.
29 раз скачали
Обновлено 29.01.2020 08:19
YASKAWA Varispeed 626MT3, частотный преобразователь. Паспорт
От
GuntisK
Мануал частотного преобразователя главного привода станков с ЧПУ YASKAWA Varispeed 626MT3.
23 раза скачали
Обновлено 29.01.2020 08:19
Установки настроечных переключателей сервоприводов OKUMA BDU-A, BL-D
От
GuntisK
Установки настроечных переключателей режимов сервоприводов OKUMA BDU-A и BL-D.
20 раз скачали
Обновлено 28.01.2020 11:47
OKUMA BDU-A, сервопривод. Паспорт
От
GuntisK
Инструкция по настройке асинхронного сервопривода OKUMA, тип BDU-A.
23 раза скачали
Обновлено 28.01.2020 11:47
Спецификация частотного преобразователя YASKAWA VS-626MT2
От
GuntisK
Спецификация к частотному преобразователю главного привода YASKAWA VS-626MT2. Имеется данные по установке, подключению и вводе в эксплуатацию.
12 раз скачали
Обновлено 28.01.2020 11:48
YASKAWA 626VM3, частотный преобразователь. Паспорт
От
GuntisK
Мануал частотного преобразователя главного привода станков с ЧПУ, YASKAWA 626VM3. Содержит информацию и формулы для подбора привода.
14 раз скачали
Обновлено 28.01.2020 07:37
Cinod
Инвертор HY. Инструкция на русском языке.
Здравствуйте. Работаю над переводом инструкции к инвертору HY (Китай). На русском её нет. Только английский. По окончании перевода, опубликую результат здесь. Думаю, многим может пригодиться. Потому прошу вашей помощи. Я не электронщик. В терминологии не силён. Хочу чтобы люди понимающие взглянули на мои «труды» и помогли исправить ошибки, которые, несомненно будут. Чтобы помогли отредактировать. На данный момент переведено около 25% руководства. Всё в виде PDF файла. Заранее всем благодарен.
- Вложения
-
 15009 просмотров")
-

Автор темы
KimIV

Частотные преобразователи. Модели HY**D***B. Руководство.
Руководство пользователя (на английском языке) по частотным преобразователям HY Huanyang Invertor, моделям HY**D***B. Весь перечень моделей представлен на стр. 65-66 настоящего руководства.
 3580 просмотров")
В списке параметров помимо их названий ещё три столбца:
— Factory Setting. Это заводские настройки. Тупо переписаны с руководства пользователя.
— Device Settings. Это настройки конкретно моего девайса, то есть то, что было в реале запрограммировано. Есть отличия от заводских настроек.
— My Setting. А это то, что я настроил, чтобы нормально заработал штатный двиг токарного станка ТВ-4.
- Вложения
-
- Instruction HY Huanyang Invertor.djvu
- Руководство пользователя
- (1.08 МБ) 922 скачивания
-
- Параметры.xlsx
- Список параметров
- (19.87 КБ) 673 скачивания
Ты должен делать добро из зла, потому что его больше не из чего делать. Уоренн Роберт Пенн.
-
Автор темы
KimIV
Частотные преобразователи. Модели HY**D***B. Руководство.
Сообщение #2 KimIV » 26 мар 2016, 13:38
Ты должен делать добро из зла, потому что его больше не из чего делать. Уоренн Роберт Пенн.
-
DOC

Частотные преобразователи. Модели HY**D***B. Руководство.
Сообщение #3 DOC » 26 мар 2016, 13:50
Игорь у меня такой же частотник долго мучился методом тыка по настройке есть записанные основные настройки если надо?
Не стыдно быть бедным,стыдно быть дешёвым!
-
Автор темы
KimIV
Частотные преобразователи. Модели HY**D***B. Руководство.
Сообщение #4 KimIV » 26 мар 2016, 14:13
Нет, Саш, не надо. Я наоборот скоро свои настройки выложу 
Ты должен делать добро из зла, потому что его больше не из чего делать. Уоренн Роберт Пенн.
 |
Подключение, настройка и запуск преобразователя частоты (далее ПЧ) HY01D523B фирмы Huanyang Inverter. |
Русской инструкции нет. Под ее видом с файлообменников качаются вирусняки и прочая нечисть.
В интернете много информации по данному ПЧ, но она разрознена и неполная. Я опишу процесс подключения и настройки подробно.

Маркировка ПЧ.
Откручиваем два винта внизу передней панели и снимаем переднюю крышку. Там расположены колодки подключения ПЧ.

Колодки подключения.
Нижняя силовая колодка.
R, S, T — подключение питания ПЧ. При трехфазном питании подключаются фазы ко всем трем контактам. Однофазное питание подключается к любым двум контактам из перечисленных трех.
P+, PR — к этим контактам подключается тормозной резистор. Он необходим для быстрой остановки шпинделя. Его номинал можно посмотреть в инструкции на ПЧ. Практически для всех ПЧ параметры тормозных резисторов совпадают. Отклонятся по параметрам резистора можно на 10-15%, но не рекомендуется. Вообще, и без резистора шпиндель прекрасно останавливается динамическим торможением. Подождать несколько секунд до остановки можно.
| Класс напряж. |
Мощность двигателя, кВт |
Момент при полной нагрузке, кг*м |
Характеристики резисторов |
Тормозной момент при 10%ED |
| 220 В | 0.2 | 0.110 | 80Вт, 200 Ом | 400 |
| 0.4 | 0.216 | 80Вт, 200 Ом | 220 | |
| 0.75 | 0.427 | 80Вт, 200 Ом | 125 | |
| 1.5 | 0.849 | 300Вт, 100 Ом | 125 | |
| 2.2 | 1.265 | 300Вт, 70 Ом | 125 | |
| 380 В | 0.4 | 0.216 | 80Вт, 750 Ом | 230 |
| 0.75 | 0.427 | 80Вт, 750 Ом | 125 | |
| 1.5 | 0.849 | 300Вт, 400 Ом | 125 | |
| 2.2 | 1.265 | 300Вт, 250 Ом | 125 | |
| 3.7 | 2.080 | 400Вт, 150 Ом | 125 | |
| 5.5 | 3.111 | 500Вт, 100 Ом | 125 | |
| 7.5 | 4.148 | 1000Вт, 75 Ом | 125 | |
| 11 | 6.186 | 1000Вт, 50 Ом | 125 | |
| 15 | 8.248 | 1500Вт, 40 Ом | 125 | |
| 18.5 | 10.281 | 4800Вт, 32 Ом | 125 | |
| 22 | 12.338 | 4800Вт, 27.2 Ом | 125 | |
| 30 | 16.497 | 6000Вт, 20 Ом | 125 | |
| 37 | 20.6 | 9600Вт, 16 Ом | 125 | |
| 45 | 24.745 | 9600Вт, 13.6 Ом | 125 | |
| 55 | 31.11 | 12000Вт, 10 Ом | 100 | |
| 75 | 42.7 | 19200Вт, 6.8 Ом | 110 | |
| 90 | 52.5 | 19200Вт, 6.8 Ом | 100 |
U, V, W — к этим контактам подключается шпиндель. Если ротор вращается не в ту сторону, поменяйте местами любые две фазы, идущие к шпинделю.
К 9 контакту подключается экран кабеля питания шпинделя.
Верхние 2 колодки пока трогать не будем.
Включение.
Кабель питания и шпиндель подключены. ВНИМАНИЕ! Если ПЧ не настроен, нельзя запускать двигатель. Двигатель очень быстро выйдет из строя. В интернете я видел данные о 15-30 секундах.
Включаем питание ПЧ. Запустится он через несколько секунд, затем идет загрузка еще пару секунд.
Для изменения настроек нажимаем PRGM. Клавишами вверх и вниз выбираем номер параметра. Клавишей >> можно выбрать изменяемый разряд номера параметра. Затем нажимаем кнопку SET и устанавливаем необходимое значение. Далее нажимаем SET для сохранения настроек. На экране появится надпись end. Проверяем и при необходимости устанавливаем следующие параметры.
PD001 — Источник команд на запуск и останов. Значение 0 — передняя панель ПЧ, 1 — управление через выводы колодки multi-input, 2 — порт RS485.
PD002 — Источник частоты вращения. Значение 0 — передняя панель ПЧ, 1 — управление через внешний резистор или резистор на панели (если имеется), 2 — порт RS485.
PD003 — Текущая установленная частота ПЧ. Для первого запуска устанавливаем значение 100.
PD004 — Базовая частота — 400.
PD005 — Максимальная допустимая частота — 400.
PD006 — Промежуточная выходная частота — 2.5
PD007 — Минимальная частота — 0,5.
PD008 — Напряжение питания двигателя — 220.
PD009 — промежуточное напряжение — 15.
PD010 — ограничение минимального напряжения — 7.
PD011 — ограничение минимальной частоты — 100.
PD014 — время разгона двигателя. Для проверки выставить 20 секунд. Устанавливать очень маленькое время разгона не рекомендуется. Оптимальное время 5-10 секунд.
PD015 — время торможения двигателя. Для проверки выставить 20 секунд. Устанавливать очень маленькое время торможения не рекомендуется, так как при торможении происходит рекуперация энергии, шпиндель начинает работать как генератор. В инструкции на ЧП такой же мощности, но другой фирмы указано, что генерируемое напряжение может достигать 450 вольт. Резкое торможение может вывести ПЧ из строя. Оптимальное время зависит от нагрузки на шпиндель и для легких фрез составляет 4-7 секунд.
PD026 — режим торможения. Значение 0 — торможение снижением частоты. 1 — торможение на выбеге. Рекомендую для проверки шпинделя установить значение 1. При нажатии на кнопку STOP моментально прекратится подача напряжения на обмотки мотора. Он начнет останавливаться на выбеге и будет очень хорошо слышна работа подшипников. При торможении снижением частоты, звук несущей частоты ШИМ слышно очень сильно, что мешает услышать работу подшипников.
PD041 — установка несущей частоты ШИМ. Очень интересный параметр, о котором на форумах ничего не сказано. Может принимать знаначения от 0 до 15.
| Значение | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| Частота кГц | 0,1 | 1 | 1,5 | 2 | 3 | 4 | 5 | 7 | 8 | 9 | 10 | 11 | 13 | 15 | 17 | 20 |
С возрастанием несущей частоты заметно уменьшается уровень шума работы двигателя (выставьте сначала значение 1, после проверки работы выставьте 15 и услышите разницу), увеличиваются помехи и нагрев ПЧ. Однако следует обратить внимание на то, что номинальный выходной ток привода будет уменьшаться.
Длина кабеля между ПЧ и двигателем не должна превышать:
— 15 м для несущей частоты 20 кГц,
— 30 м для несущей частоты 15 кГц,
— 50 м для несущей частоты 10 кГц,
— 100 м для несущей частоты 5 кГц,
— 150 м- ≤3 кГц;
при длине кабеля более 10 м может потребоваться использование индуктивного фильтра, устанавливаемого между ПЧ и двигателем.
PD141 — номинальное напряжение двигателя — 220.
PD142 — Номинальный ток двигателя — 5. Советую выставить номинальный ток 80% от указанного на двигателе. Пусть лучше при перегрузке сработает защита, чем через обмотки пойдет «номинальный» ток. Я перестраховываюсь.
Для правильной индикации оборотов на индикаторе передней панели, установите:
PD143 — Количество полюсов двигателя — 2.
PD144 — Передаточное отношение — 3000.
Запуск двигателя.
Если Вы уверены, что все настройки правильно выставили, можете нажать кнопку RUN. Послышится звук срабатывания реле, и ротор начнет разгоняться до 6000 об/мин. Слушайте нет ли посторонних звуков. Если все хорошо, дайте двигателю поработать минуты 3-5, контролируйте нагрев двигателя и наличие посторонних запахов (дым, оплавленный пластик), посмотрите параметры работы нажатием кнопки >>. А00х.х — ток в обмотках двигателя, ххххх — количество оборотов, Uххх.х — напряжение в обмотках двигателя ( подробнее написано в инструкции по эксплуатации инвертора на стр. 15-16). Нажмите кнопку STOP. Если все хорошо, нажмите кнопку вверх и увеличьте частоту кнопками вверх, вниз. Кнопка >> меняет разряд индикатора, который будет изменен. Выставьте частоту 200 Гц и нажмите RUN. Если все в порядке, не останавливая шпиндель измените частоту до 400 Гц. Контролируйте звук и нагрев. Дайте шпинделю поработать минут 10, он должен не сильно нагреваться из центральной части к краям. Если нагрев существенно выше на одном из краев, чем в центре, значит, подшипники греются. Не повышайте частоту и при отсутствии посторонних звуков дайте поработать двигателю какое-то время. Известны случаи, когда подшипники прирабатывались, хотя шпиндели на производстве должны отработать сутки, и только после проверки отправляться на продажу. Поэтому на штуцерах водяных шпинделей могут быть небольшие следы ржавчины.
Если все хорошо, то все хорошо. Донастраивайте ПЧ под свои нужды, экспериментируйте, главное, понимайте, что делаете. Поищите и скачайте инструкцию на русском языке на похожий по мощности ПЧ другого производителя. Осторожно. Номера параметров скорее всего не совпадут, но набор параметров на 80% похож у разных производителей. Почитайте описание параметров.
Также у ПЧ есть съемная передняя панель, соединенная 10 проводным шлейфом. Разъемы стандартные. Читал, что на 1-2 метра шлейф можно удлинить и установить панель в удобном месте.

Съемная передняя панель.
Как запустить ПЧ с компьютера и регулировать его частоту рассмотрю в другой статье.
Установка и подключение
Назначение силовых клемм
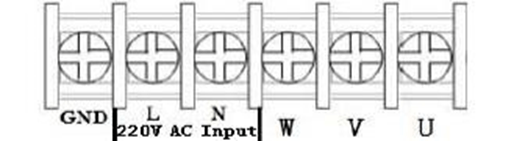
| Обознач. клеммы | Функциональное назначение |
| L, N | Однофазный вход, сеть 1 фаза 220В |
| U, V, W | Выходные клеммы для подключения однофазно мотора 220В АС (перем. Тока) |
| GND | Клемма заземления |
Назначение клемм управления
| Обознач. клеммы | Функциональное назначение | Примечание / Указание |
| 15V / 24V | Выход источника .питания 15/24В | 200мА 15 /24В |
| X6 | Входная клемма управления 6 Реверс | Для активации (вкл.) соединить кл. 6 и клемму СОМ |
| X5 | Входная клемма управления 5. Управление обратным направлением вращения | Для активации (вкл.) соединить кл. 6 и клемму СОМ |
| X4 | Входная клемма управления 4 Управление прямым направлением вращения | Для активации (вкл.) соединить кл. 6 и клемму СОМ |
| X3 | Входная клемма управления 3 Выбор величины числа оборотов /скорости 3 | Для активации (вкл.) соединить кл. 6 и клемму СОМ |
| X2 | Входная клемма управления 2 Выбор величины числа оборотов /скорости 2 | Для активации (вкл.) соединить кл. 6 и клемму СОМ |
| X1 | Входная клемма управления 1 Выбор величины числа оборотов /скорости 1 | Для активации (вкл.) соединить кл. 6 и клемму СОМ |
| 485+ /485- | Порт связи с ПК или ПЛК |
| Обознач. клеммы | Функциональное назначение | Примечание / Указание |
| СОМ | Общий GND — заземление | |
| VL1 | Вход внешнего аналогового задающего напряжения | Задающее напряжение 0-5В /10В |
| CI | Вход внешнего аналогового задающего тока | Задающий ток 20ма |
| SP1 | Выход1 с открытым коллектором | |
| SP2 | Выход2 с открытым коллектором | |
| 5V / 10V | Выход ИП +5 /10В | Питание 5 / 10В 20ма |
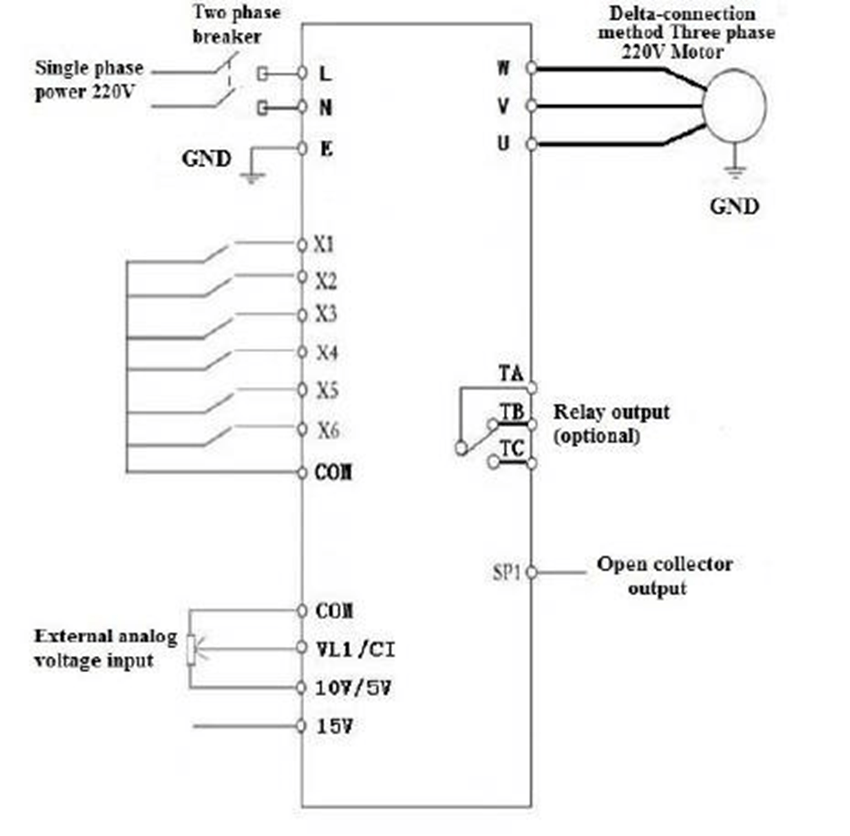
Основная схема подключения
Для подключения на 220В трехфазного асинхронного двигателя, с обмотками соединенными в звезду, надо переключить его обмотки в треугольник.
Программируемые параметры преобразователя
| Параметр | Назначение параметра | Диапазон изм-я параметра | Зав. уставка | Ед. измерения |
| Р00 | Макс. напряжение | 0-220 | 220 | в |
| Р01 | Частота задания | 0-400 | 50 | гц |
| Р02 | Промежуточное напряжение | 0-220 | 110 | в |
| Р03 | Промежуточная частота | 0-400 | 25 | гц |
| Р04 | Миним. напряжение | 0-220 | 0 | в |
| Р05 | Минимальн. частота | 0-400 | 0 | гц |
| Р06 | Макс.рабочая частота | 0-400 | 100 | гц |
| Р07 | Мин. рабочая частота | 0-400 | 0 | гц |
| Р08 | Скрыть пароль | 0-65535 | 33333 | |
| Р09 | Ввод пароля | 0-65535 | 0 | |
| Р10 | Источник задания частоты | 0 – кл. на пульте ПЧ 1 — Потенциометр на на пульте ПЧ 2 – внешний аналоговый сигнал 3 – по каналу RS485 |
||
| Р11 | Источник команд пуска — останова | 0 — пульт ПЧ 1 – канал RS485 2 – от внешних клемм |
| Параметр | Назначение параметра | Диапазон изм-я параметра | Зав. уставка | Ед. измерения |
| Р12 | Режимы останова | 0 — На выбеге 1 — С настраиваемым временем торможения 2 — Включением тормоза 3 — Аварийный останов |
1 | |
| Р13 | Время торможения постоянным током | 0-2,5 | 0,5 | сек |
| Р14 | Напряжение торможения | 0-140 | 20 | В |
| Р15 | Формат данных ASCII для RS485 | 0 : 7Е; 1 : 701; 2 :8N2;3 : 8E1; 4: 801 | ||
| P16 | Скорость передачи По RS485 | 0 : 4800; 1: 9600; 2: 19200; 3: 38400 | бод | |
| Р17 | ||||
| Р18 | ||||
| Р19 | Резерв | |||
| Р20 | Температура перегрева ПЧ | 1 -80 | 80 | |
| Р21 | Коэффициент снижения | 1…100 | 1 | |
| Р22 | Несущая частота | 1-10 | 10 | кГц |
| Р23 | Дискрета изменения задания частоты | 1…100 | 5 | 0.1гц |
| Р24 | Время срабатывания защиты от перегрузки | -1-60 | 3 | Сек |
| Р25 | Задание числа полюсов мотора | 0 — Два полюса 1 — Четыре полюса 2 — Шесть полюсов |
0 | |
| Р26 | Рабочая частота | 0-400 | 50 | Гц |
| Параметр | Назначение параметра | Диапазон изм-я параметра | Зав. уставка | Ед. измерения |
| Р27 | Уставка скорости 1 | 0…400 | 45 | Гц |
| Р28 | Уставка скорости 2 | 0…400 | 40 | Гц |
| Р29 | Уставка скорости 3 | 0…400 | 35 | Гц |
| Р30 | Уставка скорости 4 | 0…400 | 30 | Гц |
| Р31 | Уставка скорости 5 | 0…400 | 25 | Гц |
| Р32 | Уставка скорости 6 | 0…400 | 20 | Гц |
| Р33 | Уставка скорости 7 | 0…400 | 15 | Гц |
| Р34 | Темп нарастания основной скорости | 1….1000 | 50 | Гц |
| Р35 | Темп нарастания скорости 1 | 1….1000 | 50 | Гц /сек |
| Р36 | Темп нарастания скорости 2 | 1….1000 | 50 | Гц /сек |
| Р37 | Темп нарастания скорости 3 | 1….1000 | 50 | Гц /сек |
| Р38 | Темп нарастания скорости 4 | 1….1000 | 50 | Гц /сек |
| Р39 | Темп нарастания скорости 5 | 1….1000 | 50 | Гц /сек |
| Р40 | Темп нарастания скорости 6 | 1….1000 | 50 | Гц /сек |
| Р41 | Темп нарастания скорости 7 | 1….1000 | 50 | Гц /сек |
| Р42 | Темп снижения Основной скорости | 1….1000 | 50 | Гц /сек |
| Р43 | Темп снижения Скорости 1 | 1….1000 | 50 | Гц /сек |
| Р44 | Темп снижения Скорости 2 | 1….1000 | 50 | Гц /сек |
| Р45 | Темп снижения Скорости 3 | 1….1000 | 50 | Гц /сек |
| Р46 | Темп снижения Скорости 4 | 1….1000 | 50 | Гц /сек |
| Р47 | Темп снижения Скорости 5 | 1….1000 | 50 | Гц /сек |
| Параметр | Назначение параметра | Диапазон изм-я параметра | Зав. уставка | Ед. измерения |
| Р48 | Темп снижения Скорости 6 | 1….1000 | 50 | Гц /сек |
| Р49 | Темп снижения Скорости 7 | 1….1000 | 50 | Гц /сек |
| Р50 | Выбор функции для многофункционального Входа 1 | 0:не активен 1: останов от внеш. сигнала 2: останов от пульта ПЧ 3: управление от пульта ПЧ 4: остановка от пульта ПЧ 5: выбор прямого направления вращения 6: выбор обратного направления вращения 7:резервировано 8:сброс ошибки 9: внешняя команд реверса 10: вперед от пульта ПЧ 11: вперед от пульта ПЧ 12: реверс от пульта ПЧ 13: задание скорости 1 14: задание скорости 2 15: задание скорости 3 16: сигнал внеш. неисправности |
13 | |
| Р51 | Выбор функции для многофунк входа 2 | То же | 14 | |
| Р52 | Выбор функции для многофунк входа 3 | То же | 15 | |
| Р53 | Выбор функции для многофунк входа 4 | То же | 5 | |
| Р54 | Выбор функции для многофунк входа 5 | То же | 6 | |
| Р55 | Выбор функции для многофунк входа 6 | То же | 9 |
| Параметр | Назначение параметра | Диапазон изм-я параметра | Зав. уставка | Ед. измерения |
| Р57 | Много функциональный выход 1 | 0 – не активен, не используется 1 – рабочий режим 2: — режим готовности 3 — индикатор неисправности 4 — сработал таймер |
0 | |
| Р58 | Многофунк. выход 2 | То же (SP1) | 0 | |
| Р59 | Многофунк. выход 3 | То же | 0 | |
| Р60 | Многофунк. выход 4 | То же (релейный выход) | 0 | |
| Р61 | Опции ПИД-регулятор | 0 – не активен, не используется 1 – положит. сигнал задания и отрицат. обратная связь 2 – отицат. сигнал задания и отрицат. обратная связь 3 – положит. сигнал задания и положит. обратная связь 4 — отрицат. сигнал задания и положит. обратная связь |
0 | |
| Р62 | Опции для дисплея | 0 – заданная частота 1 – текущая рабочая частота 2 — число оборотов 3 – значение тока 4 — температура 5 — время |
0 | |
| Р65 | Опции при включении ПЧ | 0 – нормальное включение 1 – сообщение об ошибке при пуске 2 – вкл. питание при вращении вперед 3 — при вращении назад |
0 | |
| Р66 | Время задержки входного сигнала | 0 — 65535 | 60 | Млс |
| Р67 | Коэффициент напряжения | 0- 65535 | 32500 | |
| Р68 | Уставка для величины Пониженного напряжения | 0 .. 220 | В | |
| Р69 | Уставка по перенапряжению | 220 — 400 | 300 | В |
| Параметр | Назначение параметра | Диапазон изм-я параметра | Зав. уставка | Ед. измерения |
| Р70 | Компенсация момента | 0: величина компенсации задана в Р72 1: произведение Р72хР71 минус входное напряжение в Р71 |
||
| Р71 | Напряжение компенсации момента | 100 ….300 | 10 | В |
| Р72 | Уставка компенсации момента | 0 …. 100 | 0 | |
| Р73 | Макс. внешнее аналоговое | 0…. 65535 | 61440 | |
| Р74 | Мин. внешнее аналоговое | 0…. 65535 | 4096 | |
| Р75 | Величина компенсации | 0…. 65535 | 1130 | |
| Р76 | Коэффициент тока | 0…. 65535 | 9500 | |
| Р77 | Сброс параметров | 0…. 65535 (Сброс параметров при 54321) | 0 | |
| Р78 | Перегрузка по току сети | 0…. 65535 | 3000 | mA |
| Р79 | Ток перегрузки1-я ступень | 0…. 65535 | 3000 | mA |
| Р80 | Ток перегрузки 2-я ступень | 0…. 65535 | 3000 | mA |
| P81 | Ток перегрузки 3-я ступень | 0…. 65535 | 3000 | |
| P82 | Ток перегрузки 4-я ступень | 0…. 65535 | 3000 | |
| P83 | Ток перегрузки 5-я ступень | 0…. 65535 | 3000 | |
| P84 | Ток перегрузки 6-я ступень | 0…. 65535 | 3000 | |
| P85 | Ток перегрузки 7-я ступень | 0…. 65535 | 3000 |
| Параметр | Назначение параметра | Диапазон изм-я параметра | Зав. уставка | Ед. измерения |
| Р86 | JOG частота – для прямого вращения | 0 … 400 | 20 | |
| Р87 | JOG частота – для обратного вращения | 0 … 400 | 20 | |
| Р88 | Темп увеличения JOG скорости | 1 ….. 1000 | 50 | Гц/сек |
| Р89 | Темп снижения JOG скорости | 1 ….. 1000 | 50 | Гц /сек |
| Р90 | Режим останова JOG | 0 – на выбеге 1 – с управляемым замедлением 2 – остановка тормозом 3 — аварийный останов |
1 | |
| Р91 | Время торможения | 0…. 2,5 | 0.1 | Сек |
| Р92 | Выбор числа фаз на выходе ПЧ | 0: три фаза 2: трехпроводный Однофазный выход |
0 | |
| Р93 | Настройка фазы А | 0 ….65535 | ||
| Р94 | Настройка фазы В | 0 ….65535 | ||
| Р93 | Время работы | 0 ….65535 | 16 | Сек |
| Р94 | Время останова | 0 ….65535 | 16 | Сек |
| Р99 | Наибольшая величина давления | |||
| Р100 | Наименьшая величина давления | |||
| Р105 | Макс. значение уставки ПИД регулятора | |||
| Р106 | Мин. значение уставки ПИД регулятора | |||
| Р107 | Уставка ПИД регулятора | |||
| Р114 | Пропорциональный Коэфф Усиления ПИД регулятора |
| Параметр | Назначение параметра | Диапазон изм-я параметра | Зав. уставка | Ед. измерения |
| Р115 | Интегральный коэффициент усиления ПИД – регулятора | |||
| Р116 | Дифференц. коэффициент усиления ПИД — регулятора | |||
| Р127 | Остаток часов наработки | 0-65535 | 65535 | Ч |
Установка пароля для ввода параметров и времени простоя
Р08 это параметр для скрытого пароля он всегда показывает 0000, а не текущее значение. Если ввести значение параметра P09 = скрытому значению Р08, то параметр Р08 покажет скрытое значение, и можно будет изменить значение Р08 и остальных параметров. Параметр Р09 обнуляет при отключении питания от ПЧ.
Если Р127 = 65535, то функция счета на уменьшения не включена. Если Р127 < 65535, то начинается счет , а вычитание, и Р127 уменьшится на 1, когда инвертор проработает 1 час. Инвертор остановится, когда значение параметра Р127 станет = 0.
Список возможных неисправностей
| Код ошибки | Описание кода ошибки (неисправности) |
| Err 1 | Сработала защита модуля IGBT |
| Err 2 | Низкое напряжение питания (на входе) ПЧ |
| Err 3 | Перенапряжение по питанию (на входе) ПЧ |
| Err 4 | Неисправность в схеме управления |
| Err 5 | Пуск ПЧ при повышении напряжения на входе |
| Err 6 | Сработала защита от перегрузки по току |
| Err 7 | Превышение времени |
| Err 8 | Перегрев радиатора ПЧ |
| Err 9 | Внешняя неисправность |
Скачать полное руководство.
RU
EN