Если вам интересно, какой драйвер шагового двигателя выбрать для сборки станка с ЧПУ или заменить существующий драйвер шагового двигателя в вашем ЧПУ, то это руководство поможет вам.
В идеале вам нужно, чтобы драйвер мог управлять вашим шаговым двигателем без чрезмерного нагрева или шума. Вы также не захотите покупать слишком дорогой шаговый драйвер, когда используете относительно небольшой шаговый двигатель.
Я написал это руководство после рассмотрения нескольких вариантов шагового драйвера и использования многих из них в своей личной мастерской.
Обратите внимание, что драйвер шагового двигателя также называется контроллером двигателя и используется в данном руководстве как синонимы.
Это руководство разделено на разделы, в которых я перехожу от шаговых драйверов с самыми низкими значениями пикового тока к самым высоким.
Чтобы максимально использовать этот обзор, вы должны знать либо максимальный номинальный ток на вашем шаговом двигателе, либо при каком токе вы планируете запускать двигатель в соответствии с требованиями к крутящему моменту и частоте вращения.
Мой лучший выбор — это драйвер шагового двигателя DM542T, который представляет собой мощный, но доступный шаговый драйвер, который подойдет практически для любого приложения ЧПУ.
Вот лучшие драйверы шагового двигателя, доступные сегодня для приложений ЧПУ:
| Шаговый драйвер | Пиковый ток |
| 1. Драйвер шагового двигателя A4988 | 1А (2А с охлаждением) |
| 2. Драйвер шагового двигателя DRV8825 | 1,5 А (2,2 А с охлаждением) |
| 3. Драйвер шагового двигателя DM542T | 4,2 А |
| 4. Драйвер шагового двигателя TB6600 | 4,0 А |
| 5. Драйвер шагового двигателя DM556T | 5.6 A |
| 6. Драйвер шагового двигателя DM860T | 7,2 А |
Драйвер шагового двигателя A4988

| Максимум. Текущий | 1А (2А с охлаждением) |
| Шаговый двигатель | NEMA 14 (до 1А) |
| Источник питания | 8-35В |
Шаговый драйвер A4988 — один из самых популярных на рынке небольших шаговых драйверов с ЧПУ.
Этот шаговый драйвер можно найти во многих бюджетных контроллерах ЧПУ и настольных ЧПУ. Настольный CNC 3018 использует его в качестве шагового драйвера.
Код A4988 представляет собой номер модели шаговой ИС, произведенной Texas Instruments.
Эта ИС была впервые использована на коммутационной плате и преобразована в практически пригодный для использования шаговый драйвер компанией Pololu Robotics.
Позже его клонировали многие китайские производители, и в настоящее время он продается по очень доступной цене.
Вероятно, это самый дешевый вариант шагового драйвера.
A4988 может подавать ток 1 А на шаговый двигатель без радиатора. С дополнительным большим радиатором и принудительным воздушным охлаждением этот драйвер технически может обеспечивать ток до 2 А.
Однако, на самом деле, вам следует ожидать, что с этим драйвером на шаговый двигатель будет подаваться ток до 1 А, если вы не хотите рискнуть его поджарить.
Что это значит для шаговых двигателей? Это означает, что A4988 может очень хорошо работать с NEMA 14 с током менее 1 А.
Он также может работать с небольшими двигателями NEMA 17 с номинальным током до 1,5 А. Хотя не рекомендую. Как показывает практика, в идеале вам следует покупать шаговый привод с номинальным током, который в 1,4 раза превышает номинальный ток шагового двигателя.
Если вы не знаете, какие шаговые двигатели выбрать для своего ЧПУ, то это поможет вам — Шаговый двигатель для ЧПУ станка. Какой выбрать?
Этот драйвер используется во многих настольных ЧПУ и 3D-принтерах, поэтому он идеально подходит для такого приложения.
Обратите внимание, что вам нужен один драйвер A4988 для каждого шагового двигателя, который вы используете.
A4988 может делать микрошаги до 1/16 в пятиступенчатых режимах. Очень важно запускать этот шаговый двигатель в микрошаговом режиме, чтобы избежать проблем с резонансом.
Потенциометр в A4988 позволяет легко регулировать ток в соответствии с требованиями вашего шагового двигателя.

Для работы этого контроллера двигателя вам потребуется напряжение источника питания в диапазоне 8–35 В. Большинство людей устанавливают напряжение питания 24 В, чтобы обеспечить бесперебойную работу A4988.
В целом, это отличный стартерный шаговый драйвер, который стоит шокирующе недорого.
Драйвер шагового двигателя DRV8825

| Максимум. Текущий | 1,5 А (2,2 А с охлаждением) |
| Шаговый двигатель | NEMA 14 и 17 (до 1.5A) |
| Источник питания | 8-45В |
Драйвер шагового двигателя DRV8825 — еще один небольшой драйвер ЧПУ, который очень популярен в небольших приложениях ЧПУ.
DRV8825 также представляет собой шаговую ИС, произведенную Texas Instruments. Pololu Robotics впервые разместила его на коммутационной доске.
Вы всегда можете купить оригинальный Pololu DRV8825, хотя вам придется заплатить примерно в 5 раз больше за почти незначительное повышение производительности.
Этот драйвер можно назвать обновленной версией драйвера A4988.
Он может выдерживать ток 1,5 А без какого-либо охлаждения и 2,2 А с принудительным воздушным охлаждением и теплоотводом, что является обновлением по сравнению с током 1 А без охлаждения в A4988.
Этот контроллер двигателя с ЧПУ может достаточно хорошо управлять двигателем NEMA 17 на 1,5 А и, очевидно, любым шаговым двигателем меньшего размера.
В то время как A4988 может делать до 1/16 микрошага, DRV8825 может делать до 1/32 микрошага, делая движение двигателя более плавным.
DRV8825 поставляется с алюминиевым радиатором.

DRV8825 — это замена драйверов A4988 в любой системе ЧПУ. Это потому, что они имеют одинаковый размер, распиновку и интерфейс.
Регулировка тока от драйвера в DRV8825 очень похожа на таковую в A4988, путем регулировки потенциометра.
Напряжение питания DRV8825 находится в диапазоне 8-45 В, что является повышением верхнего предела напряжения 35 В для драйвера A4988.
В целом это обновленный шаговый драйвер A4988, который, как ни странно, стоит почти столько же. Если у вас нет особых причин для приобретения A4988, используйте драйвер шагового двигателя DRV8825.
Драйвер шагового двигателя DM542T

| Максимум. Текущий | 4,2 А |
| Шаговый двигатель | NEMA 14,17,23,24 (до 4.2A) |
| Источник питания | 8-45В |
DM542T — мой личный фаворит и тот, который я чаще всего использую для своих DIY-приложений с ЧПУ.
Этот шаговый драйвер может приводить в действие почти любой двигатель NEMA 17 и NEMA 23, за исключением, вероятно, NEMA 23 с высоким крутящим моментом с током 4,2 А.
Этот драйвер шагового двигателя — отличный выбор почти для любого другого шагового двигателя в ЧПУ. Я говорю это потому, что NEMA 34 очень редко встречается в ЧПУ.
Это делает драйвер отличным выбором практически для любого проекта DIY с ЧПУ на основе GRBL, включая большие рамы 8 ‘x 4’.
Если вам нужно выбрать контроллер на основе GRBL, который вам нужен для вашего ЧПУ, то это руководство, которое я написал, вероятно, вам поможет — Контроллеры GRBL для ЧПУ для любителей.
Этот контроллер мотора известен своей высокой надежностью и долгим сроком службы. Благодаря микросхеме DM542T, этот продукт отличается высочайшим качеством. Теплоотвод и охлаждение этого мотора превосходны. Это очень тихий драйвер, он не напрягается даже при 4А.
Одной из приятных особенностей этого двигателя является отличная система плавного пуска. Шаговые двигатели без этого потребляют большой ток, когда они изначально запитаны.
Это вызывает резкий скачок в двигателе и значительно сокращает срок его службы.
DM542T смягчает это, регулируя ток и позволяя крутящему моменту увеличиваться постепенно.
Функция антирезонанса DM542T работает так, как рекламируется, и это позволяет избежать любой вибрации и шума в средних диапазонах (в усилителях).
Кроме того, шаговые двигатели обычно нагреваются, когда они не вращаются при подключении к источнику питания.
DM542T имеет функцию уменьшения тока холостого хода, при которой ток падает до половины значения оборотов.
DM542T предлагает микрошаги до 1/128. Но что действительно приятно, так это микрошаговое управление.
Вы можете использовать DIP-переключатели в шаговом двигателе, чтобы легко установить число микрошага из 15 предустановленных режимов (1/2, 1/4,… и так далее до 1/128).

В отличие от предыдущих драйверов шагового двигателя в этом списке, вам не нужно поворачивать потенциометр для регулировки тока.
Подобно микрошаговому управлению, вы можете использовать DIP-переключатели для установки тока из 8 выбираемых пиковых токов (1,00 A, 1,46 A, 1,91 A, 2,37 A, 2,84 A, 3,31 A, 3,76 A, 4,20 A).
Для запуска этого шагового драйвера вам необходимо подать входное напряжение 20-50 В постоянного тока. На всякий случай безопаснее поддерживать верхний предел напряжения питания 45 В постоянного тока.
Как и в случае с большинством шаговых двигателей, при увеличении напряжения питания вы получите более высокий крутящий момент даже при более высоких оборотах.
В целом, это, вероятно, лучший драйвер двигателя 24 В в этом списке.
Обратите внимание, что для запуска 3 двигателей вам потребуется три шаговых драйвера.
Вы не можете запустить несколько двигателей от одного шагового драйвера, так как это одноосные шаговые драйверы.
В последнее время я начал чаще использовать драйвер DM556 это более распространённый, улучшенный аналог DM542T, к сожалению он немного дороже
Драйвер шагового двигателя TB6600

| Максимум. Текущий | 4А |
| Шаговый двигатель | NEMA 14,17,23 (до 4A) |
| Источник питания | 9-42В |
Драйвер TB6600 — очень популярный драйвер, который чаще всего используется для питания двигателей NEMA 17 и NEMA 23.
Шаговая ИС этого драйвера производится Toshiba. Если быть очень точным, использованный шаговый двигатель — TB67S109A, а не TB6600.
Но по характеристикам аналогичен TB6600.
Он имеет семь предустановленных выходных токов (0,5 А / 1,0 А / 1,5 А / 2,0 А / 2,5 А / 2,8 А / 3,0 А / 3,5 А), которыми можно управлять с помощью шестизначного DIP-переключателя на драйвере.
Максимальный выходной ток, который можно установить с помощью DIP-переключателей, составляет 3,5 А, что ниже теоретического максимального тока 4 А.
На мой взгляд, этот драйвер может хорошо работать, если ваши требования до 3А. Кроме того, он шумит и нагревается.
Как и другие драйверы шагового двигателя для станков с ЧПУ в этом диапазоне, он имеет встроенные функции защиты от перегрузки по току и температуры.
Этот шаговый двигатель имеет пять предустановленных режимов микрошага (1/1, 1/2, 1/4, 1/8, 1/16, 1/32), которыми можно управлять с помощью DIP-переключателей.

Источник питания, который можно использовать для запуска этого шагового двигателя, составляет 9–42 В с рекомендуемым напряжением 12–30 В.
На всякий случай лучше не превышать 30 Вольт.
Большинство пользователей используют этот шаговый двигатель при напряжении 24 В, поскольку они получают нужные обороты и крутящий момент при этом напряжении питания.
По словам производителя, этот шаговый двигатель идеально подходит для достижения целевого крутящего момента 255 унций на дюйм или ниже.
Что мне показалось наиболее интересным в этом шаговом двигателе, так это то, что он предлагает ток не менее 3 А без шума, почти вдвое дешевле, чем DM542T.
Помните, что с этим контроллером мотора или DM542T вам понадобится три таких контроллера для работы трехосного ЧПУ.
Если ваш бюджет ограничен, а требования к току шагового двигателя ниже 3А, я предлагаю вам получить это. В противном случае я предлагаю вам выбрать DM542T или DM556 — улучшенный аналог DM542T.
Драйвер шагового двигателя DM556T

| Максимум. Текущий | 5,6 А |
| Шаговый двигатель | NEMA 17,23,24,34 (до 5.6A) |
| Источник питания | 18-50 В постоянного тока |
Этот шаговый драйвер работает на микросхеме DM556T. Этот драйвер аналогичен интерфейсу DM542T. Однако он может выдерживать пиковый ток 5,6 А.
Это делает этот шаговый двигатель идеальным даже для двигателей NEMA 23 с высоким крутящим моментом (4,2 А) и удерживающим моментом 425 унций на дюйм.
Этот шаговый драйвер подходит практически для всех проектов с ЧПУ, включая большие фрезерные станки с ЧПУ 8 ‘x 4’.
Единственное, что он не может работать, это, вероятно, NEMA 34 с током 6 А и удерживающим моментом более 1000 унций.
Если это ваше требование, я предлагаю вам взглянуть на следующий драйвер шагового двигателя в этом списке.
DM556T обладает отличными антирезонансными характеристиками для обеспечения плавного движения и бесшумной работы.
Подобно DM542T, он имеет DIP-переключатели для выбора из 16 предустановленных разрешений микрошага (до 1/125).
Кроме того, он имеет еще один набор DIP-переключателей, которые вы можете включать и выключать для выбора из 8 предустановленных настроек выходного тока (1,8 А, 2,1 А, 2,7 А, 3,2 А, 3,8 А, 4,3 А, 4,9 А, 5,6 А).

У него есть функция определения тока холостого хода, с помощью которой он вдвое уменьшает выходной ток, если двигатель не работает.
Этот шаговый двигатель почти всегда работает при температуре ниже 60 ° C из-за превосходной технологии теплоотвода в этом драйвере.
Рекомендуемое входное напряжение для этого шагового драйвера составляет 20-50 В постоянного тока.
Я обнаружил, что документация по этому шаговому драйверу достаточно хороша для новичков.
Этот драйвер стоит немного больше, чем DM542T, и отлично подходит для любого ЧПУ с шаговыми двигателями вплоть до NEMA 24.
Драйвер шагового двигателя DM860T

| Максимум. Текущий | 7,2 А |
| Шаговый двигатель | NEMA 17,23,24,34 (до 7.2A) |
| Источник питания | 18-50 В постоянного тока |
Этот шаговый драйвер действительно является гигантским шаговым драйвером в этом списке с точки зрения номинального тока.
Благодаря микросхеме шагового двигателя DM860T этот драйвер может обрабатывать до 7,2 А.
Редко вам это понадобится на станке с ЧПУ DIY, потому что такие усилители требуются только шаговыми двигателями NEMA 34, а они редко встречаются на станках с ЧПУ DIY.
Однако есть некоторые доступные ЧПУ, в которых используются двигатели NEMA 34 (например, ЧПУ) для дополнительной мощности резания во время тяжелых производственных работ.
Вы также найдете эти тяжелые двигатели на оси Z тяжелых настольных фрезеров и некоторых токарных станков.
В этом шаговом драйвере есть несколько мощных антирезонансных функций, которые позволяют ему работать через такие большие двигатели и высокие крутящие моменты.
DM860T имеет 8-битную систему DIP-переключателей для управления разрешением микрошага и пиковым током.
Вы можете выбрать из шестнадцати предустановленных разрешений микрошага (до 1/256).
Подобно другим драйверам, вы можете использовать DIP-переключатель для выбора из восьми предустановленных пиковых токов (2,40 А, 3,08 А, 3,77 А, 4,45 А, 5,14 А, 5,83 А, 6,52 А, 7,20 А).
При пиковых токах, предлагаемых этим драйвером, и тяжелых двигателях NEMA 34, которые работают на нем, вам понадобится мощный источник питания.
Понятно, что DM860T работает как от источников питания переменного, так и от постоянного тока. Вы можете использовать источники питания в диапазоне 18–80 В переменного тока или 36–110 В постоянного тока для работы этого шагового устройства.
В целом, это мощный драйвер шагового двигателя, который вы должны получить, если у вас высокие требования к току. Есть несколько других брендов, которые предлагают такую мощность, однако они намного дороже.
Ближайшим аналогом DM860T является шаговый драйвер DM870, который почти так же хорош.
Руководство покупателя: что следует учитывать перед выбором шагового драйвера для вашего ЧПУ
- Сначала выберите свой шаговый двигатель: не выбирайте шаговый драйвер, пока не решите, какие шаговые двигатели вы будете использовать.
- Пиковый ток шаговых двигателей: это основное значение, которое определяет ваш драйвер. В идеале следует приобрести шаговый драйвер с максимальным номинальным током, который в 1,4 раза больше, чем у шагового двигателя. Если это не вариант, убедитесь, что ток вашего драйвера как минимум такой же, как у двигателя, чтобы получить максимальный крутящий момент.
- Источник питания: получите надежный источник питания с номинальным напряжением, соответствующим вашему шаговому драйверу, для максимальной производительности. Для получения высоких крутящих моментов на высоких оборотах необходимо значительно повысить напряжение.
- Количество драйверов: количество необходимых шаговых драйверов совпадает с количеством шаговых двигателей, которые вы планируете использовать.
- Резонанс и шум: при увеличении тока ненадежные шаговые драйверы приводят к шуму и вибрации. Вот почему так важен антирезонанс.
Спецификация драйвера шагового двигателя
DM860D — это высокопроизводительный цифровой драйвер шагового двигателя нового поколения, основанный на DSP и алгоритме управления PID с технологией микрошагового управления. Двигатели, управляемые DM860D, могут работать с гораздо меньшим шумом и гораздо меньшей вибрацией, чем другие приводы на рынке. DM860D обладает низким уровнем шума, вибрации и нагрева. Напряжение DM860D составляет 24–80 В постоянного тока. Он подходит для всех двухфазных гибридных шаговых двигателей с током менее 6,0 А. Существует 16 видов микрошагов DM860D. Максимальное число шагов DM860D составляет 51200 шагов/об (микрошаг равен 1/256). Его диапазон тока 2.0A-6.0A, а его выходной ток имеет 8 киосков. DM860D имеет автоматическую функцию защиты от полупотока, перенапряжения, пониженного напряжения и перегрузки по току.
Выбор тока
|
Пик |
Среднеквадратичное значение |
SW1 | SW2 | SW3 |
|
2.40A |
2.00A |
вкл | вкл | вкл |
|
3.08A |
2.57A |
выкл | вкл | вкл |
|
3.77A |
3.14A |
вкл | выкл | вкл |
|
4.45A |
3.71A |
выкл | выкл | вкл |
|
5.14A |
4.28A |
вкл | вкл | выкл |
| 5.83A | 4.86A | выкл | вкл | выкл |
| 6.52A | 5.43A | вкл | выкл | выкл |
| 7.20A | 6.00A | выкл | выкл | выкл |
Выбор микрошага
|
Импульс/об |
SW5 |
SW6 | SW7 | SW8 |
| По умолчанию | вкл | вкл | вкл | вкл |
| 800 | выкл | вкл | вкл | вкл |
| 1600 | вкл | выкл | вкл | вкл |
| 3200 | выкл | выкл | вкл | вкл |
| 6400 | вкл | вкл | выкл | вкл |
| 12800 | выкл | вкл | выкл | вкл |
| 25600 | вкл | выкл | выкл | вкл |
| 51200 | выкл | выкл | выкл | вкл |
| 1000 | вкл | вкл | вкл | выкл |
| 2000 | выкл | вкл | вкл | выкл |
| 4000 | вкл | выкл | вкл | выкл |
| 5000 | выкл | выкл | вкл | выкл |
| 8000 | вкл | вкл | выкл | выкл |
| 10000 | выкл | вкл | выкл | выкл |
| 20000 | вкл | выкл | выкл | выкл |
| 40000 | выкл | выкл | выкл | выкл |
По умолчанию: Импульс можно настроить в соответствии с необходимыми требованиями.
Общий индикатор
|
Явление |
Причина |
Решение |
| Горит красный индикатор | 1. Короткое замыкание проводов двигателя. | Осмотрите или замените провода |
| Горит красный индикатор | 2. Внешнее напряжение слишком высокое или ниже рабочего напряжения драйвера. |
Отрегулируйте напряжение до приемлемого диапазона |
|
Горит красный индикатор |
3. Неизвестная причина |
Вернуть товар |
Приложения
Драйвер может применяться в различном небольшом оборудовании и инструментах автоматизации, таких как этикетировочные машины, машины для резки, упаковочные машины, чертежные машины, гравировальные машины, станки с ЧПУ и так далее. Он всегда хорошо работает, когда используется в оборудовании, требующем низкой вибрации, низкого уровня шума, высокой точности и высокой скорости.
Описание функций драйвера
|
Функция драйвера |
Инструкция по эксплуатации |
| Настройка выходного тока | Пользователи могут установить выходной ток драйвера с помощью трех переключателей SW1-SW3. При установке конкретного выходного тока, пожалуйста, обратитесь к инструкциям на рисунке панели драйвера. |
| Настройка микрошага | Пользователи могут установить драйвер Microstep с помощью четырех переключателей SW5-SW8. При настройке конкретного подразделения Microstep, пожалуйста, обратитесь к инструкциям на рисунке панели драйвера. |
|
Автоматическая функция половинного тока |
Пользователи могут установить функцию половинного потока драйвера с помощью SW4. «OFF» указывает, что ток покоя установлен на половину динамического тока, то есть через 0,5 секунды после прекращения импульса ток автоматически уменьшается примерно наполовину. «ON» указывает на то, что ток покоя и динамический ток совпадают. Пользователь может установить переключатель SW4 в положение «ВЫКЛ», чтобы уменьшить нагрев двигателя и привода и повысить надежность. |
|
Сигнальные интерфейсы |
PUL+ и PUL- – положительная и отрицательная стороны управляющего импульсного сигнала; DIR+ и DIR- являются положительной и отрицательной стороной сигнала направления; ENA+ и ENA- являются положительной и отрицательной стороной сигнала включения. |
|
Интерфейсы двигателя |
А+ и А- подключены к фазной обмотке двигателя; B+ и Bare подключены к другой фазной обмотке двигателя. Если вам нужно повернуть назад, одну из фазных обмоток можно поменять местами. |
|
Интерфейсы питания |
Драйвер использует источник питания постоянного тока. Рекомендуемое рабочее напряжение составляет 24–80 В постоянного тока, а потребляемая мощность должна превышать 350 Вт. |
|
Индикатор света |
Есть два световых индикатора. Индикатор питания зеленый. Когда питание драйвера включено, зеленый свет всегда будет гореть. Индикатор неисправности красный, при перенапряжении или перегрузке по току всегда горит красный свет; после устранения неисправности драйвера при повторном включении красный свет погаснет. |
|
Инструкция по установке |
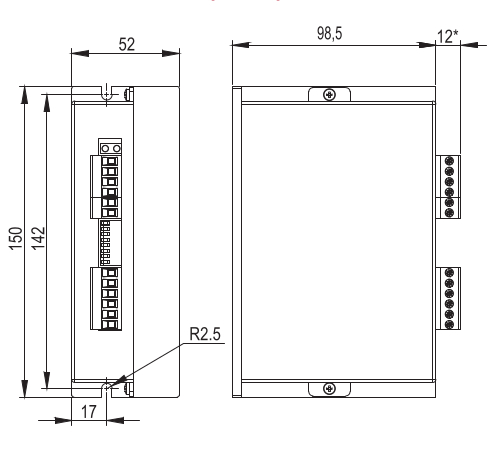
Размеры драйвера: 150 × 98 × 51 мм, см. диаграмму размеров. Пожалуйста, оставьте 10 см пространства для рассеивания тепла. Во время установки он должен находиться вплотную к металлическому шкафу для отвода тепла. |
Детали интерфейса сигнала:
Цепи внутреннего интерфейса драйвера развязаны сигналами оптопары, R на рисунке — внешний токоограничивающий резистор. Подключение дифференциальное. И он имеет хорошую защиту от помех.
Инструкция к драйверу DM860D

Настройка микрошагового режима на драйвере SMD-DM860D
| Микрошаговый режим (шагов на оборот) | Положение DIP-переключателей | |||
| SW5 | SW6 | SW7 | SW8 | |
| 400 | on | on | on | on |
| 800 | off | on | on | on |
| 1600 | on | off | on | on |
| 3200 | off | off | on | on |
| 6400 | on | on | off | on |
| 12800 | off | on | off | on |
| 25600 | on | off | off | on |
| 51200 | off | off | off | on |
| 1000 | on | on | on | off |
| 2000 | off | on | on | off |
| 4000 | on | off | on | off |
| 5000 | off | off | on | off |
| 8000 | on | on | off | off |
| 10000 | off | on | off | off |
| 20000 | on | off | off | off |
| 40000 | off | off | off | off |
Установка максимального тока обмоток на драйвере SMD-DM860D
| Ток обмоток шагового двигателя, А | Положение DIPпереключателей | |||
| Максимальное значение | Действующее значение | SW1 | SW2 | SW3 |
| 2,4 | 2,00 | on | on | on |
| 3,1 | 2,57 | off | on | on |
| 3,8 | 3,14 | on | off | on |
| 4,5 | 3,71 | off | off | on |
| 5,1 | 4,28 | on | on | off |
| 5,1 | 4,86 | off | on | off |
| 6,5 | 5,43 | on | off | off |
| 7,2 | 6,00 | off | off | off |
Основные особенности SMD-DM860D
- Предназначен для управления 2-фазными гибридными шаговыми двигателями.
- Напряжение питания драйвера 24…80 VDC.
- Максимальная частота управляющих импульсов 200 кГц.
- Максимальный ток фазы шагового двигателя 2,4…7,2 А (8 дискретных установок, осуществляемых DIP-переключателями).
- 16 установок микрошагового режима DIPпереключателями. Максимальный коэффициент деления 1/256.
- Оптическая развязка силовых цепей драйвера предотвращает повреждение контроллера и двигателя в результате пробоя силового ключа.
- Электронная схема драйвера построена на основе 32-битного микропроцессора обработки сигналов.
- Драйвер обеспечивает низкий уровень шума, вибраций и температуры двигателя во время работы, а также ограничение тока обмоток и защиту двигателя от неправильного подключения.
Габаритные и установочные размеры драйвера
Общие сведения:
Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Один оборот ротора (360°) состоит из определённого количества шагов. Количество полных шагов в одном обороте указывается в технической документации двигателя.
Например, ротор шагового двигателя 17HS1352-P4130, за один полный шаг, поворачивается на 1,8°. Значит для поворота ротора на 360° двигатель должен совершить 200 полных шагов.
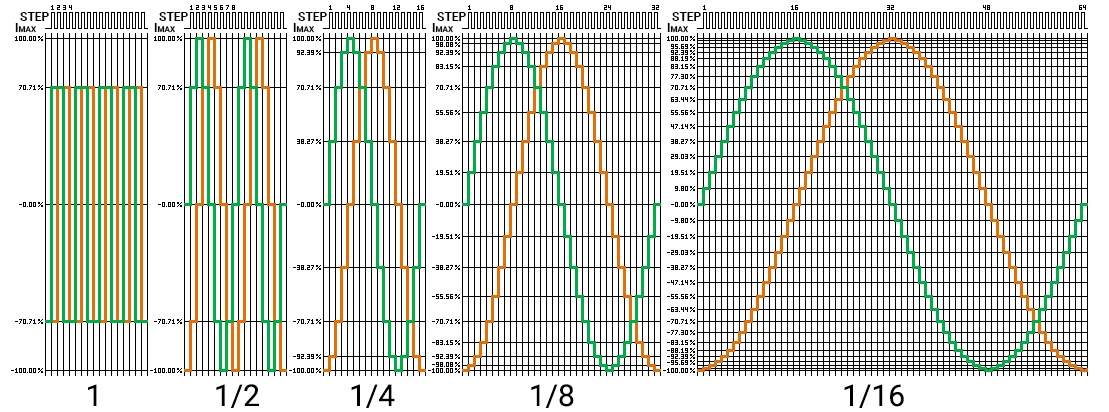
Для совершения одного полного шага на обмотки двигателя поступает серия сигналов от драйвера (как в полношаговом «1», так и в микрошаговых режимах «2», «4», «8», «16»).
С принципом работы шаговых двигателей можно ознакомиться в разделе Wiki — ШД.
Микрошаг:
Большинство драйверов позволяют разделить полный шаг двигателя на несколько микрошагов. Выбор микрошага устанавливается согласно таблице в инструкции к драйверу. В таблице указывается количество микрошагов на полный шаг «Microstep» (1/2/4/8/16/32/…) и/или количество тактов на полный оборот вала «Pulse/rev» (200/400/800/1600/3200/6400/…).
Если для целого поворота ротора двигателя в режиме 1 микрошаг на полный шаг требуется 200 тактов, то в режиме 4 микрошага на полный шаг, потребуется уже 800 тактов.
Чем больше микрошагов в полном шаге, тем точнее и плавнее поворачивается ротор шагового двигателя, но для поддержания той же скорости, требуется увеличивать частоту следования тактовых импульсов.
Ограничение тока фазы:
Большинство драйверов позволяют ограничить ток фазы (ток протекающий через обмотки двигателя). Выбор тока фазы осуществляется согласно таблице в инструкции к драйверу. В таблице указывается действующий ток «Current» и/или пиковый ток «PK Current». Чем выше ток, тем выше отдаваемый момент (сила двигателя).
Слишком большой ток приведёт к перегреву двигателя и может вызвать его поломку, а слишком маленький может привести к пропуску шагов, или нестабильному вращению ротора.
У некоторых драйверов ограничение тока осуществляется поворотом потенциометра.
Ток удержания:
Ток удержания это постоянный ток проходящий через обмотки двигателя, удерживающий вал в неподвижном состоянии. Некоторые драйверы позволяют снизить ток удержания.
Снижение тока удержания приводит к снижению нагрева двигателя при его удержании.
Силовые выводы драйвера:
Силовые выводы используются для подачи напряжения питания шагового двигателя и подключения его обмоток.
- Входы «VCC», «GND» / «+V», «GND» / «AC+», «AC-» — предназначены для получения напряжения питания шагового двигателя.
- Выводы «A+» и «A-» — предназначены для подключения первой обмотки шагового двигателя.
- Выводы «B+» и «B-» — предназначены для подключения второй обмотки шагового двигателя.
Подключение обмоток двигателя к драйверу зависит от количества выводов у двигателя.

Драйверы DM860H, DM556, TB6600 позволяют работать только с биполярными двигателями. Двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.
Запрещается подключать или отключать обмотки двигателя на включенном драйвере!
Сигналы управления STEP/DIR (PUL/DIR):
- Вход драйвера «STEP» (он же «PULSE») — предназначен для получения тактовых импульсов. За один импульс ротор двигателя поворачивается на один микрошаг. Вход может работать по фронту или спаду импульса. Чем выше частота импульсов, тем выше скорость вращения ротора.
- Вход драйвера «DIR» — предназначен для выбора направления вращения двигателя («0» — в одну сторону, «1» — в другую сторону). Смена состояния вывода «DIR» должна осуществляться при отсутствии импульсов на выводе «STEP».
- Вход драйвера «ENABLE» — разрешает работу двигателя. У большинства драйверов данный вход является инверсным, работа двигателя разрешена при отсутствии напряжения на входе. Некоторые драйверы позволяют вообще не подключать этот вход. Если работа двигателя запрещена, то его обмотки электрически отключаются и вал двигателя не удерживается.
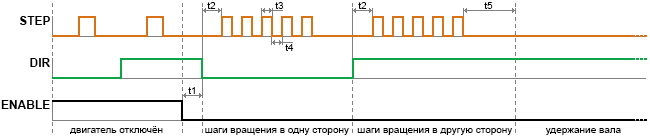
- Двигатель отключён если на входе «ENABLE» есть напряжение.
Сигналы на входах «STEP» и «DIR» игнорируются драйвером. Вал двигателя освобождён. - Вал поворачивается на один микрошаг с каждым импульсом на входе «STEP», при условии что на входе «ENABLE» нет напряжения.
Направление поворота вала зависит от состояния на входе «DIR». - Вал двигателя удерживается в неподвижном состоянии если на входе «ENABLE» нет напряжения и на вход «STEP» не подаются импульсы.
- t1: После снятия напряжения со входа «ENABLE» должно пройти не менее 5мкс до изменения уровня на входе «STEP» или «DIR».
- t2: После изменения состояния на входе «DIR» должно пройти не менее 5мкс до подачи импульса на вход «STEP».
- t3, t4: Длительность импульса или паузы на входе «STEP» не должна быть меньше 2,5мкс.
- t5: Автоматическое снижение тока удержания происходит через 1-2 сек после подачи последнего импульса на вход «STEP». Время зависит от типа драйвера.
Сигналы управления CW/CCW:
(Данные сигналы не поддерживаются драйверами DM860H, DM556, TB6600)
- Вход драйвера «CW» — предназначен для получения тактовых импульсов. За один импульс ротор двигателя поворачивается на один микрошаг. Вход может работать по фронту или спаду импульса. Чем выше частота импульсов, тем выше скорость вращения ротора.
- Вход драйвера «CCW» — выполняет те же действия что и вход «CW», но ротор двигателя поворачивается в другую сторону.
- Вход драйвера «ENABLE» — разрешает работу двигателя. У большинства драйверов данный вход является инверсным, работа двигателя разрешена при отсутствии напряжения на входе. Некоторые драйверы позволяют вообще не подключать этот вход. Если работа двигателя запрещена, то его обмотки электрически отключаются и вал двигателя не удерживается.
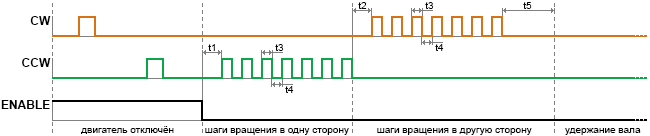
- Двигатель отключён если на входе «ENABLE» есть напряжение.
Сигналы на входах «CW» и «CCW» игнорируются драйвером. Вал двигателя освобождён. - Вал поворачивается на один микрошаг с каждым импульсом на входе «CW» или «CCW», при условии что на входе «ENABLE» нет напряжения.
Направление поворота вала зависит от того, на какой вход поступают импульсы. - Вал двигателя удерживается в неподвижном состоянии если на входе «ENABLE» нет напряжения и на входы «CW» и «CCW» не подаются импульсы.
- t1: После снятия напряжения со входа «ENABLE» должно пройти не менее 5мкс до подачи импульса на вход «CW» или «CCW».
- t2: После последнего импульса на одном входе должно пройти не менее 5мкс до подачи импульса на дрогой вход.
- t3, t4: Длительность импульса или паузы не должна быть меньше 2,5мкс.
- t5: Автоматическое снижение тока удержания происходит через 1-2 сек после подачи последнего импульса. Время зависит от типа драйвера.
Подключение управляющих выводов драйвера:
Для подключения управляющих выводов можно использовать одну их следующих схем:
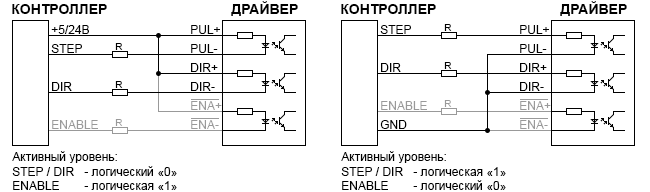
Допускается подключать драйвер к контроллеру без использования сигнала ENABLE, тогда выводы ENA+ и ENA- остаются свободными (не подключёнными).
- При уровне логической «1» = 5В, все сопротивления R исключаются из схемы.
- При уровне логической «1» = 12В, все сопротивления R равны 1кОм.
- При уровне логической «1» = 24В, все сопротивления R равны 2кОм.
Подключение драйвера к Arduino:
Так как логические уровни Arduino UNO равны 5В, то при подключении управляющих выводов к драйверу, ограничивающие сопротивления R не нужны.
Для подключения драйвера к Arduino воспользуемся схемой где выводы PUL-, DIR-, ENA- подключены к GND контроллера (правая схема на картинке выше).
Если подключить драйвер к Arduino без использования сигнала ENABLE, оставив выводы ENA+ и ENA- не подключёнными, то приведённый ниже скетч не сможет освобождать вал. Вал двигателя будет удерживаться всё время, пока он не вращается.
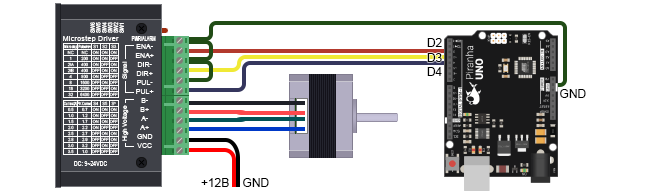
Выводы драйвера ENA+, DIR+ и PUL+ можно подключить к любым выводам Arduino, их номера указываются в начале скетча. В примере это выводы 2, 3 и 4 соответственно.
Если для подключения драйвера воспользоваться схемой где выводы PUL+, DIR+, ENA+ подключены к 5V контроллера (левая схема на картинке выше), то в скетче нужно изменить логические уровни устанавливаемые функциями digitalWrite().
Управление двигателем при помощи Arduino:
Для работы скетча установите микрошаг 1/4, что соответствует 800 тактов на 1 оборот. Микрошаг устанавливается DIP-переключателями драйвера согласно таблице на его корпусе.
Скетч постоянно повторяет 4 действия:
- Поворот вала на 2 полных оборота в одну сторону.
- Остановка двигателя на 5 секунд с удержанием вала.
- Поворот вала на 2 полных оборота в другую сторону.
- Остановка двигателя на 5 секунд с освобождением вала.
const uint8_t pin_ENA = 2; // Вывод Arduino подключённый к входу драйвера ENA+.
const uint8_t pin_DIR = 3; // Вывод Arduino подключённый к входу драйвера DIR+.
const uint8_t pin_PUL = 4; // Вывод Arduino подключённый к входу драйвера PUL+.
// Вывод GND Arduino соединён с входами драйвера ENA-, DIR-, PUL-.
uint32_t f = 1000; // Определяем частоту следования микрошагов от 1 до 200'000 Гц.
// Чем выше частота, тем выше скорость вращения вала.
void setup(){ //
pinMode( pin_ENA, OUTPUT ); // Конфигурируем вывод Arduino как выход.
pinMode( pin_DIR, OUTPUT ); // Конфигурируем вывод Arduino как выход.
pinMode( pin_PUL, OUTPUT ); // Конфигурируем вывод Arduino как выход.
} //
//
uint32_t t = 1000000/f/2; // Определяем длительность импульсов t3 и пауз t4 в мкс.
//
void loop(){ //
// Готовимся к движению вала: //
digitalWrite( pin_ENA, 0 ); // Разрешаем работу двигателя.
delayMicroseconds(5); // Выполняем задержку t1 (см. график STEP/DIR).
digitalWrite( pin_DIR, 0 ); // Выбираем направление вращения.
delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR).
// Поворачиваем вал на 2 оборота: //
for(int i=0; i<1600; i++){ // Выполняем 1600 проходов цикла (1 оборот = 800 тактов, 2 оборота = 1600).
digitalWrite( pin_PUL, 1 ); // Устанавливаем на выводе PUL состояние логической «1».
delayMicroseconds(t); // Выполняем задержку t3 (см. график STEP/DIR).
digitalWrite( pin_PUL, 0 ); // Устанавливаем на выводе PUL состояние логического «0».
delayMicroseconds(t); // Выполняем задержку t4 (см. график STEP/DIR).
} //
// Останавливаем вал удерживая его: // Двигатель не вращается, если на вывод PUL не поступают импульсы.
delay(5000); // Ждём 5 секунд. В это время двигатель остановлен, его вал удерживается.
// Меняем направление движения вала: //
digitalWrite( pin_DIR, 1 ); // Меняем логический уровень вывода DIR с 0 на 1.
delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR).
// Поворачиваем вал на 2 оборота: //
for(int i=0; i<1600; i++){ // Выполняем 1600 проходов цикла (1 оборот = 800 тактов, 2 оборота = 1600).
digitalWrite( pin_PUL, 1 ); // Устанавливаем на выводе PUL состояние логической «1».
delayMicroseconds(t); // Выполняем задержку t3 (см. график STEP/DIR).
digitalWrite( pin_PUL, 0 ); // Устанавливаем на выводе PUL состояние логического «0».
delayMicroseconds(t); // Выполняем задержку t4 (см. график STEP/DIR).
} //
// Останавливаем вал без удержания: //
digitalWrite( pin_ENA, 1 ); // Запрещаем работу двигателя, отключаем токи в обмотках.
delay(5000); // Ждём 5 секунд. В это время двигатель отключен, его вал свободен.
} //
- Движение вала на 2 оборота в одну сторону:
Перед началом движения вала мы разрешаем работу двигателя (установив 0 на выводе ENA) и выбираем направление движения (установив 0 или 1 на вывод DIR), далее выполняем движение подачей импульсов на вывод PUL в теле цикла for. Каждый импульс поворачивает ротор на угол одного микрошага. Микрошаг установлен DIP-переключателями в положение 800 тактов на полный оборот. Код цикла выполняется 1600 раз, значит вал повернётся на 2 оборота. - Остановка вала с удержанием:
Двигатель не вращается, если на вывод PUL не поступают импульсы. Значит обычная задержка на 5000 мс приведёт к остановке двигателя на 5 секунд. Так как работа двигателя была разрешена (на выводе ENA ранее был установлен 0), то через обмотки двигателя будет протекать ток удержания вала. - Движение вала на 2 оборота в другую сторону:
Направление движения вала определяется логическим уровнем на выводе DIR. Ранее на нём был установлен 0, значит теперь нужно установить 1. Далее подачей импульсов на вывод PUL мы заставляем вращаться вал, но теперь в другую сторону. - Остановка вала без удержания:
В предыдущий раз мы останавливали двигатель прекращая подавать импульсы на вывод PUL, но не запрещали работу двигателя, в результате через его обмотки протекал ток удержания вала. Теперь мы запретим работу двигателя установив на выводе ENA уровень логической 1, что приведёт к исчезновению токов в обмотках двигателя. Теперь в течении 5 секунд, двигатель будет не только остановлен, но и его вал можно свободно вращать руками.
Управление шаговым двигателем по прерываниям от 2 таймера Arduino:
const uint8_t pin_ENA = 2; // Вывод Arduino подключённый к входу драйвера ENA+.
const uint8_t pin_DIR = 3; // Вывод Arduino подключённый к входу драйвера DIR+.
const uint8_t pin_PUL = 4; // Вывод Arduino подключённый к входу драйвера PUL+.
// Вывод GND Arduino соединён с входами драйвера ENA-, DIR-, PUL-.
volatile uint32_t step=0; // Переменная хранит количество микрошагов, которые требуется совершить.
//
void setup(){ //
pinMode( pin_ENA, OUTPUT ); // Конфигурируем вывод Arduino как выход.
pinMode( pin_DIR, OUTPUT ); // Конфигурируем вывод Arduino как выход.
pinMode( pin_PUL, OUTPUT ); // Конфигурируем вывод Arduino как выход.
funcSetTimer2( 1000 ); // Запускаем 2 таймер указав частоту следования микрошагов от 1 до 200'000 Гц.
} // Чем выше частота, тем выше скорость вращения вала.
//
void loop(){ //
// Готовимся к движению вала: //
digitalWrite( pin_ENA, 0 ); // Разрешаем работу двигателя.
delayMicroseconds(5); // Выполняем задержку t1 (см. график STEP/DIR).
digitalWrite( pin_DIR, 0 ); // Выбираем направление вращения.
delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR).
// Поворачиваем вал на 2 оборота: //
step=1600; // Указываем количество микрошагов, которые требуется совершить.
while(step){;} // Ждём обнуления переменной.
// Останавливаем вал удерживая его: // Двигатель не вращается, если на вывод PUL не поступают импульсы.
delay(5000); // Ждём 5 секунд. В это время двигатель остановлен, его вал удерживается.
// Меняем направление движения вала: //
digitalWrite( pin_DIR, 1 ); // Меняем логический уровень вывода DIR с 0 на 1.
delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR).
// Поворачиваем вал на 2 оборота: //
step=1600; // Указываем количество микрошагов, которые требуется совершить.
while(step){;} // Ждём обнуления переменной.
// Останавливаем вал без удержания: //
digitalWrite( pin_ENA, 1 ); // Запрещаем работу двигателя, отключаем токи в обмотках.
delay(5000); // Ждём 5 секунд. В это время двигатель отключен, его вал свободен.
} //
//
// ОБРАБОТКА ПРЕРЫВАНИЙ 2 ТАЙМЕРА: //
ISR(TIMER2_COMPA_vect){ // Функция вызывается по совпадению регистров TCNT2 и OCR2A.
if( step ){ // Если требуется выполнять микрошаги, то ...
bool p = digitalRead(pin_PUL); // Определяем текущее состояние на выводе PUL.
digitalWrite(pin_PUL, !p); // Меняем состояние на выводе PUL.
if( p ){ step--; } // Уменьшаем количество требуемых микрошагов.
} //
} //
//
// ФУНКЦИЯ НАСТРОЙКИ 2 ТАЙМЕРА: //
void funcSetTimer2(uint32_t f){ // Параметр: «f» - частота тактирования ШД от 1 до 200'000 Гц.
if(f>200000){f=200000;}
// Определяем значение предделителя:
uint16_t i; uint8_t j; f*=2;
if(f>(F_CPU/255/ 1)){i= 1; j=1;}else
if(f>(F_CPU/255/ 8)){i= 8; j=2;}else
if(f>(F_CPU/255/ 32)){i= 32; j=3;}else
if(f>(F_CPU/255/ 64)){i= 64; j=4;}else
if(f>(F_CPU/255/128)){i= 128; j=5;}else
if(f>(F_CPU/255/256)){i= 256; j=6;}else
{i=1024; j=7;}
// Устанавливаем регистры 2 таймера:
TCCR2A = 0<<COM2A1 | 0<<COM2A0 | 0<<COM2B1 | 0<<COM2B0 | 1<<WGM21 | 0<<WGM20;
TCCR2B = 0<<FOC2A | 0<<FOC2B | 0<<WGM22 | j;
OCR2A = (uint8_t)(F_CPU/(i*f))-1;
TIMSK2 = 0<<OCIE2B | 1<<OCIE2A | 0<<TOIE2;
SREG = 1<<7;
}
Данный скетч выполняет те же действия что и предыдущий. Но подача импульсов на вывод PUL осуществляется не в цикле основного кода, а по прерываниям от таймера.
Как только переменной step присваивается число отличное от 0, то на драйвер начинают поступать импульсы. Значение step убывает с каждым поданным импульсом, пока не достигнет 0, что приведёт к остановке вала двигателя. Частота подачи импульсов в Гц указывается функцией funcSetTimer2().
В данном скетче мы ждём завершение вращения вала проверяя значение step в цикле while, вместо этого можно выполнять другие действия, например, опрашивать концевики, датчики, измерять пройденное расстояние и т.д.
Код работает на Arduino UNO, Pro Mini, Nano, Mega.
Ссылки
- Шаговые двигатели.
- Драйвер шагового двигателя, TB6600 (4.0А).
- Драйвер шагового двигателя DM556 (5.6A).
- Драйвер шагового двигателя DM860H (7.2A).
- Wiki — Шаговые двигатели.
-
Описание
-
Технические характеристики
-
Сопутствующие товары
Особенности драйвера:
- Технология самотестирования и автоматической настройки параметров обеспечивает оптимальную реакцию при работе с разными двигателями
- 16 ступеней деления шага, от 1:2 до 1:256, устанавливаемых с помощью DIP переключателей
- Возможность выбора тока удержания (половинный или полный) вала двигателя
- Оптоизолированные входа, высокая помехоустойчивость
- Защита от перенапряжения, низкого питающего напряжения и перегрузки по току
- Размер 143 * 98 * 48 мм
Настройка выходного тока
|
Рабочий , А |
2.0 |
2.57 |
3.14 |
3.71 |
4.28 |
4.86 |
5.43 |
6.0 |
|
Пиковый, А |
2.4 |
3.08 |
3.77 |
4.45 |
5.14 |
5.83 |
6.52 |
7.2 |
|
SW3 |
ON |
ON |
ON |
ON |
OFF |
OFF |
OFF |
OFF |
|
SW2 |
ON |
ON |
OFF |
OFF |
ON |
ON |
OFF |
OFF |
|
SW1 |
ON |
OFF |
ON |
OFF |
ON |
OFF |
ON |
OFF |
SW4: OFF=Половинный ток
SW8: ON=Полный ток
Назначение контактов и индикации
|
Символ |
Функция |
Технические характеристики |
|
PWR |
Индикатор питания |
При включении загорается зеленый индикатор. |
|
ALARM |
Индикатор неисправности |
При перегрузке по току, повышенном напряжении и неисправности обмоток двигателя загорается красный индикатор. |
|
DIR- |
Сигнал направления, либо импульсный сигнал |
В одноимпульсном (PUL/DIR) режиме предоставляет возможность выбрать направление вращения вала двигателя, в двухимпульсном (CW/CCW), при подаче на него управляющих сигналов, позволяет вращать вал двигателя против часовой стрелке (CCW). Требуется: низкий уровень 0 ~ 0,5 В, высокий уровень 4 ~ 5 В, при использовании управляющего напряжения выше 5В, необходимо использовать токоограничивающие резисторы (так же касается сигналов PULSE и ENABLE) |
|
DIR+ |
||
|
PUL- |
Импульсный сигнал |
В одноимпульсном режиме (PUL/DIR) по прямоугольному импульсу управляющий драйвер переместит вал двигателя, в зависимости от выбранного микрошага, на одну дискрету в направлении, установленным сигналом DIR, в двухимпульсном (CW/CCW) вал будет вращаться только по часовой стрелке (CW). Выбор режима управления CW/CCW, устанавливается с помощью перемычек . По умолчанию стоит управления PUL/DIR. Требуется: низкий уровень 0 ~ 0,5 В, высокий уровень 4 ~ 5 В. Для надежного отклика ширина импульса должно быть больше 7.5 мкс. |
|
PUL+ |
||
|
ENA- |
Сигнал разрешения работы |
Сигнал используется для запрета и разрешения работы привода. При подаче сигнала выдается запрет на работу. При отсутствии сигнала работа привода разрешена. |
|
ENA+ |
||
|
VDC |
Электропитание |
VDC 24~80 В VAC 20~60 В |
|
GND |
||
|
+A, -A |
Подключение обмоток двигателя |
|
|
+B, -B |
Примечание:
- Источник питания не должно превышать VDC 80 В, VAC 60 В
- Уровень входного управляющего сигнала составляет 5 В, если используется питание выше 5В, то необходимо использовать токоограничивающий резистор.
- При перегрузке по току, повышенном или пониженном напряжении индикатор ALARM мигает, проверьте правильность схемы подключения, поданных напряжений и перезапустите питание.
- Зеленый индикатор PWR загорается, когда привод включен.
|
Параметры |
Мин |
Номинальный |
Макс |
Ед. изм. |
|
|
Выходной ток |
2.0 |
— |
7.2 |
А |
|
|
Напряжение питания |
VAC |
20 |
— |
60 |
В |
|
VDC |
24 |
— |
80 |
В |
|
|
Деление шага |
1:2 |
— |
1:256 |
— |
|
|
Частота входного сигнала |
0 |
— |
200 |
кГц |
|
|
Логический сигнал |
— |
— |
16 |
мА |
|
|
Наличие выхода аварийного сигнала |
Нет |
||||
|
Наличие порта для связи |
Нет |
||||
|
Поддержка сигналов управления |
PUL/DIR |
Да |
|||
|
CW/CCW |
Да |
Copyright MAXXmarketing Webdesigner GmbH